滑模控制的PLC泵站供水设计研究
2018-11-15冯涛
冯 涛
(甘肃省水利水电勘测设计研究院有限责任公司, 甘肃 兰州 730000)
引言
在各地供水工程中,泵站提升引水是常用方式。取水环节的水泵运行控制一直存在各类不稳定因素。某供水工程经4级干渠泵站取水至调蓄水池,4级泵站的提水水泵在运行过程中均会出现水泵及其有压输水管道在通过水力过渡过程中有供水不稳定及抖振等现象,工程在设计及设备选择中均按通用设计做法配置及选择成熟设备,水泵电机也采用可编程逻辑控制器(PLC)和变频技术结合的控制方式,水泵运行过程中由于供水的水流速度变化及管压的波动等不确定性因素存在,类似的传统PID控制方式对供水控制效果不尽理想。
为解决供水过程中可能出现的水体外泄、供水电机抖振、供水管道损坏等安全问题。针对系统的可靠性和控制运行精度[1],提高供水性能,特针对水泵电机的运行控制方式,在不改变现有控制设备的基础上进行改进控制方式研究。
目前在水泵电机转速控制方法中,除了使用较为广泛的PID控制之外,很多学者采用先进控制与传统控制策略结合的方法来解决单轴电机转速控制问题[2]。采用自适应蚁群智能优化算法,提高了供水的效果,但稳定度还需进一步加强,且该算法的引入增加了工程设计的复杂性[3-5]。采用了模糊控制,一定程度上改善了供水波动的不稳定现象,但模糊控制的实现过于依赖操作者的经验,使得模糊控制在应用中受到了限制。在一种铝箔纸系统的控制中,采用了与PLC编程结合的方式利用加速度和卷径补偿的分离PID控制算法,仿真结果较好[6],但对外界干扰及不确定因素调节效果较差,且工程实现还需进一步完善。
滑模控制(Sliding Mode Control,SMC)是一种非线性领域变结构控制方式(Variable Structure Control,VSC),应用广泛。自20世纪50年代末提出至今[7],该方式已成为非线性控制理论的热门研究方向。滑模控制结构简单,且对控制系统外界干扰、模型的不确定性具有强鲁棒性[8]。为此,本次技术研究改进将滑模控制器引入水泵电机控制系统中,基于现行泵站供水控制方式提出一种改进控制程度的滑模控制方式。用滑模控制器来取代常规PI控制器,利用SMC的强鲁棒特性来抑制系统因参数摄动及负载扰动等因素造成的供水不稳定现象,实现供水的稳定控制。
1 项目泵站供水滑模控制方式设计
1.1 滑模控制器设计
滑模控制器的设计思想是将误差降低并使其稳定收敛在零附近,如下页图1所示为滑模控制器设计结构图。电机的动态数学模型具备高阶、非线性与强耦合等特性,经矢量控制的坐标转换,可将电机的定子电流分解为转矩分量与励磁分量,分别用来控制电机的转矩和励磁,即可对电动机进行直接仿真[8]。首先根据水泵供水电机调速方程推导出电压与转速的微分方程[9],进而以误差渐进收敛至零为原则设计滑模算法中的切换面;最后利用Lyapunov稳定性条件,设计速度误差与滑模切换面表示的滑模切换函数。
水泵电机电枢回路方程:

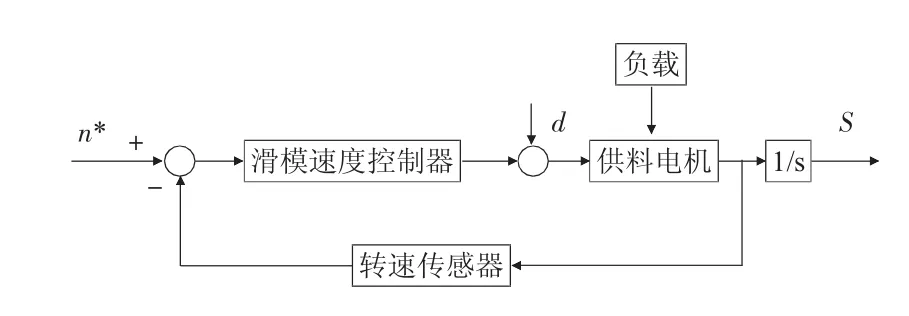
图1 滑模控制器设计结构图
转矩方程:

电动势方程:

运动方程:

联立(1)~(4)可推导出以电枢电压为输入量,转速为输出量的电机微分方程:

式中:Ua为输入电压;R为水泵电机电枢电阻;La为电枢漏磁电感;Id为电枢回路电流;E为反电动势;Cm为额定励磁下的转矩系数;TL为负载转矩;GD2为飞轮惯量;Tm为机电时间常数;n为电机实际转速;n*为电机转子机械转速。
考虑到供水过程中不稳定现象(6)式可表示为

其中 Δα、Δβ、Δγ 分别代表供水过程中的 α、β、γ 分摄动值。
定义速度跟踪误差

设计期望误差e(t)以一般趋近律方式收敛,可设滑模切换面微分为

滑模控制器模型设计,Lyapunov函数定义为

其导数为

为使得V˙(t)≤0 成立,须满足条件 f(0)=0,当s≠0,sf(s)>0,显示上述条件满足V˙(t)=S(t)S˙(t)≤0。
由 Lyapunov 第二方法,V(t)正定,V˙(t)负定,当S(t)趋于无穷时,V(t)亦趋于无穷,即系统在平衡原点S(t)=0为大范围渐进稳点平衡点。
1.2 去抖振措施
滑模控制中,滑模切换面附近容易发生抖振,原因是误差的波动引起滑模控制函数切换造成的。因此选用饱和函数sat(·)替代切换符号函数sgn(·)来削弱抖振[10],即:

其中λ>0且i=1,2,3。考虑到饱和函数的值域收敛于原符号函数的上下限之间,因此基于Lyapunov函数V(t)推导出的滑模切换面大范围渐进稳定性仍然成立。
2 电机控制仿真试验
2.1 系统建模与控制器设计
以取水口泵站的水泵电机为例进行仿真研究,由前述1.1分析,实验仿真中选一台8 kW的直流电机作样本电机,其相关额定参数为:220 V,45 A,800 r/min,R=2.0 Ω,供水电机转矩系统 Ce=0.182 5 V·min/r,通过计算可得电磁时间常数为T1=0.015 s,机电时间常数Tm=0.065 s。采用滑模控制器用来代替PI控制器。
2.2 仿真分析
为验证建模方法的可行性,分别采用PID控制方法和滑模控制进行对比仿真。仿真时间8 s,在t=4 s时刻给两种控制方法添加同样的阶跃函数,来模拟供水负载波动,仿真曲线如下页图2到图5所示。从启动性能和鲁棒性能进行对比分析:
1)启动性能分析,零初始时刻给定转速,800 r/min PID控制和滑模控制的启动特性如图2、图3所示。
从图2、图3仿真结果可分析出PID控制启动后1~2 s左右转速才达到稳定值;本文方法在启动过程虽然存在微小波动,但电机速度只需0.2 s左右即可到达给定转速,说明滑模控制方法具有更好的启动特性。
2)鲁棒性分析,系统在t=4 s时两种控制方式对扰动的抑制曲线如下页图4、图5所示。
从图4可以看出,传统PID控制方式在有干扰的情况下会出现更明显的波动,经1 s左右可基本恢复到给定转速,而本文控制方式虽然在扰动刚开始出现微小抖动,但在0.3 s左右即恢复到速度设定值,且扰动影响低于PID控制。说明滑模控制具有更强的鲁棒性。

图2 PID控制供水电机转速曲线
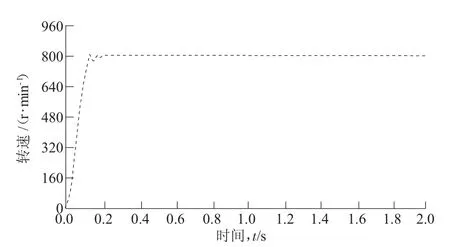
图3 基于滑模控制供水电机转速曲线
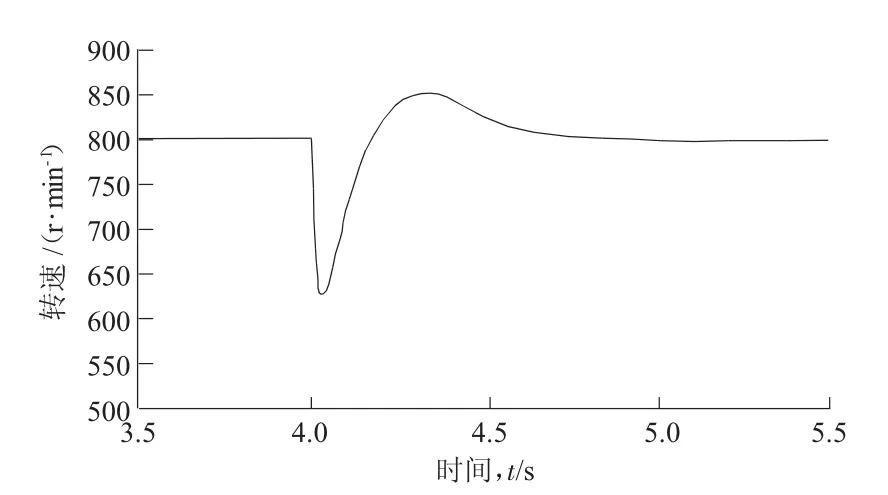
图4 PID控制转速扰动抑制曲线

图5 基于滑模控制器的转速扰动抑制曲线
3 算法实现的初步设想
项目泵站控制系统是应用可编程逻辑控制器(PLC)和变频技术结合的控制方式。运行过程中水泵电机通过位置/速度反馈编码器将运行信号上送到PLC中,PLC通过内部运算处理后将控制信号传送变频器,变频器判断电机的运行状态,依据设定调节速度和位置。项目泵站中下位PLC控制程序主要以LAD(梯形图)编程方式为主,PID算法部分实现较为简单。要实现滑模控制算法部分,传统LAD编程方式实现比较困难,因此采用西门子PLC中SCL高级语言来完成算法编译工作。此算法无需额外增加硬件成本,可在实际工程已有硬件中实现应用。
4 结语
本文以供水工程中水泵电机供水不稳定问题提出了一种基于滑模控制的PLC泵站供水设计方法。滑模控制器的引入提高了水泵电机的稳定性能;饱和函数一定程度上削弱了系统的抖振问题。仿真结果表明该方法不仅具有较快的响应速度、较小的跟踪误差,且对供水系统中的不确定性表现出良好的鲁棒性。算法的初步实现为后续工程的普遍应用奠定基础。