一种车载自锁式云台的设计
2018-11-14陈文平杨克明
陈文平 杨克明
一种车载自锁式云台的设计
陈文平1杨克明2
1.河南工学院,河南 新乡 453000 2.新乡北方车辆仪表有限公司,河南 新乡 453000
云台作为机光电一体观察设备的载体,通过对伺服电机的控制,带动光电观察设备随之进行水平方位向的旋转和高低向的俯仰。车载云台是动态环境下工作的光电平台,除了上述功能之外,还需要有稳定性和自锁性的要求。针对以上问题,在结构设计时采用了蜗轮蜗杆传动原理和自锁特性,并通过计算分析的方法对设计的可行性进行了验证,对存在的问题提出了解决思路。
云台;光电平台;蜗轮蜗杆副;稳定性;自锁式
引言
云台作为一种载体,广泛应用于特殊领域的环境观察和目标搜索以及社会治安维护、安全防卫、森林防火、气象探测等多个领域,是一种集成机光电一体化的多任务载荷的平台。
车载云台以机动载体为基准,多应用于特种车辆的配装。特种车辆在执行任务的过程中不可避免地会遇到各种各样复杂的环境和路况,而车辆在执行任务时,云台的可靠性是保证任务完成的关键。因此,作为机动载体,它的稳定性显得尤为重要。
云台作为光电观察设备的载体,是观察设备的重要组成部分。它具有通过伺服电机进行方位向控制和高低向控制的功能,并带动观察设备随之进行相应的运动。目前,云台的传动形式分为电机直驱、齿轮传动、蜗轮蜗杆传动等几种,且各有其优缺点,可相应地应用于不同的领域和环境。
配装于特种车辆的光电观察设备云台往往会受到行驶路况和车辆自身振动激励的影响,从而影响设备观察效果的识别精度。基于稳定性的需要,特种车辆搭载的云台需要具有在任何环境下自锁的功能,而这种功能在电机直驱及齿轮传动的形式下都不能直接实现,需要借助附加的锁紧装置,但这势必会增加云台的结构复杂性,造成重量增加和体积增大,与装备追求轻小的趋势相违背。因此,设计一种简单小巧而又能够有效自锁的结构显得尤为重要[1]。
经过分析比较各种结构的优缺点,本设计决定采用蜗轮蜗杆的传动结构,且自锁功能的实现正是利用了蜗轮蜗杆在一定条件下的自锁特性。
1 蜗轮蜗杆传动的特点
(1)蜗轮蜗杆传动机构相比齿轮传动机构结构紧凑,体积小、重量轻,速比范围比较大。
(2)由于蜗轮蜗杆啮合的连续性,使得其传动平稳,噪声小。
(3)当蜗杆螺旋升角小于其齿面间的当量摩擦角时,具有自锁特性。此时蜗杆只能带动蜗轮,而不能实现反向传动。
(4)蜗轮蜗杆传动与齿轮传动相比效率较低,一般只能达到0.7~0.9。因此在选择驱动电机时需要考虑传动效率损耗而带来的影响。
2 方案设计
2.1 模型建立
基于云台体积小、设计紧凑性的要求,结构上采用了模块化设计。蜗轮蜗杆传动组件的模块化在实现结构的紧凑性的同时,也可以达到维修性设计的目的。
2.1.1 方位传动组件结构建模
方位传动组件由方位蜗轮、蜗杆、方位电机、方位主轴、同步皮带及其支架等组成。蜗杆与电机轴平行且水平布置蜗轮侧方,并与之啮合,见图1。电机与蜗杆之间的传动通过同步皮带实现,皮带传动可避免齿轮传动的大体积和回转间隙。方位传动组件安装于与云台基座连为一体的固定底板上,蜗轮和固定底板上的方位主轴通过精密装调保证同轴度。
2.1.2 俯仰传动组件结构建模
俯仰传动组件由俯仰蜗轮、蜗杆、俯仰电机、俯仰主轴、同步皮带及其支架等组成,与水平传动组件相同,蜗杆与电机轴平行且水平布置。蜗轮装配于俯仰主轴上,蜗杆置于蜗轮侧方,并与之啮合,如图2所示。俯仰传动组件支架固定,根据运动相对原理,当蜗杆转动时可使自身围绕蜗轮转动,并带动与其相连的外壳等部件转动[2]。
2.1.3 整机结构建模
将方位传动组件和俯仰传动组件进行模块化组装后,再装配进整机壳体内,并在整机中通过控制模块分别实现方位旋转的控制和俯仰转动的控制。方位旋转时通过电机驱动蜗杆转动,并和蜗轮的啮合,实现相对的转动,最终动作是和蜗杆机构相连的整个壳体和固定底座之间的相对转动。俯仰转动是通过电机驱动的蜗杆和俯仰主轴上的蜗轮的啮合,带动蜗轮转动,最终实现主轴上负载的转动。整机结构见图3,外观见图4。
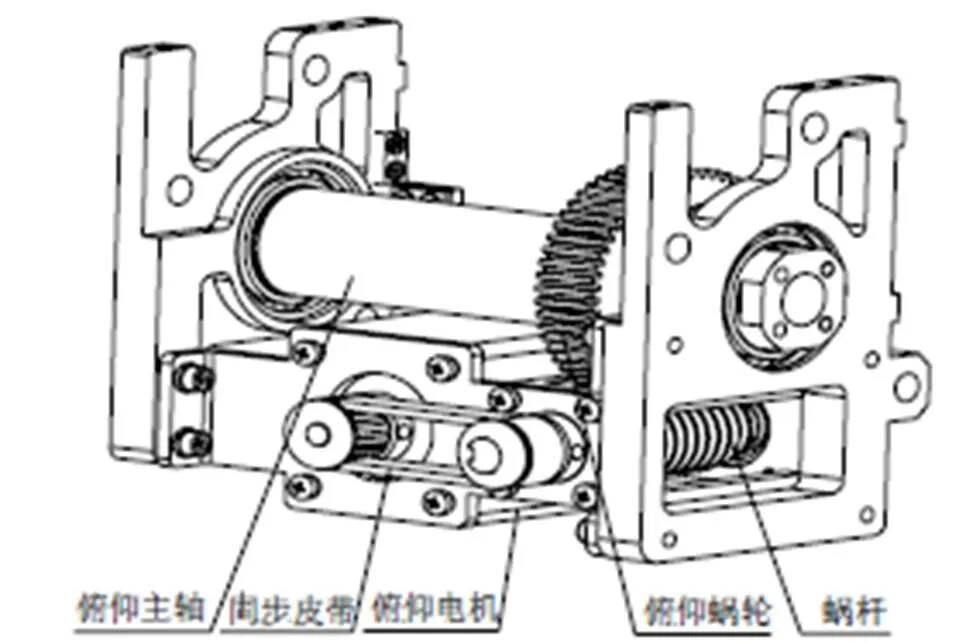
图2 俯仰传动组件结构
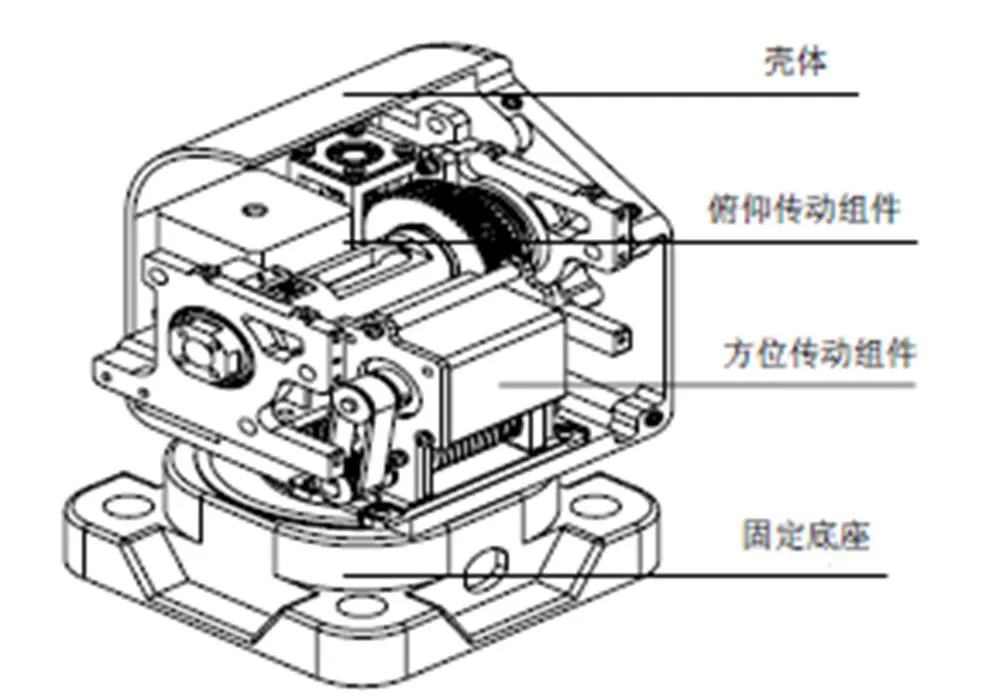
图3 整机结构

图4 整机外观
2.2 驱动电机的选择
在该云台设计方案中,驱动方式可以分为两大类,即步进电机驱动和直流伺服电机驱动。两种驱动方式各有优缺点,具体分析如表1。

表1 步进电机和直流伺服电机
考虑到本设计中对力矩、承载能力以及控制精度要求较高,因此选择高性能的直流伺服电机作为驱动电机。
2.3 设计的计算分析
根据设计要求,该云台的驱动范围为水平360°连续旋转,俯仰﹣45°~+85°转动,同时具有自锁性能。为了保证云台能够长时间可靠工作,需要对蜗杆的自锁角和云台负载扭矩进行设计计算。
2.3.1 蜗杆螺旋升角的设计计算
根据设计需要,对蜗轮蜗杆的参数进行了设计,为了实现蜗轮蜗杆的等寿命,两者均采用40Cr加工并渗碳处理。蜗杆的头数设为Z1=1,模数设为m=1,蜗杆外径设为r=19。
蜗杆节径为:r1=r-2m=17。
蜗杆的螺旋升角为:β=arctg[(m·Z1)/r1]=3°21'59"。
蜗轮蜗杆副的摩擦系数选0.06。此时,当蜗杆螺旋升角小于3°29'11"时可实现自锁。由此可知蜗杆的参数设计满足自锁条件。
2.3.2 云台负载扭矩计算
俯仰负载扭矩:俯仰载荷的外形尺寸为220 mm×100 mm,总重量约为4 kg,安装中心线在侧载中心线处,取力臂极限偏差,L=100 mm,则负载扭矩M1=4×100×9.8=3.92 N·m。
水平负载扭矩:水平负载扭矩与转动惯量与角加速度有关,则负载扭矩M2=Jβ=0.78 kg·m2(转动惯量)×4.9 rad/s2(加速度)=3.82 N·m。
根据设计冗余要求,设计输出扭矩为负载所需扭矩的约2.3倍,则设计输出扭矩为:
M3=M1×2.3=3.92 N·m×2.3=9.1 N·m。
M4=M2×2.3=3.82 N·m×2.3=8.8 N·m。
2.3.3 根据设计负载扭矩及驱动电机扭矩计算传动比
内部传动采用同步齿形带和蜗轮蜗杆传动的方式。传动效率:
η=η带·η蜗轮蜗杆·η其他=0.9×0.4×0.8=0.288。
选型电机输出扭矩为0.8 N·m。则方位及俯仰理论传动比为:
i1=M3/0.8 N·m/0.288=9.1 N·m/0.8 N·m/0.288=39.5;
i2=M4/0.8 N·m/0.288=8.8 N·m/0.8 N·m/0.288=38.2。
所以水平与俯仰传动比选择为40∶1。
2.3.4 传动比40∶1的工程设计计算
结合产品内部结构空间综合考虑,电机与蜗杆之间采用同步齿形带传动,电机与蜗杆角速比设计为i1=1。
蜗杆头数Z1=1,蜗轮齿数Z2=40,蜗杆与蜗轮速比i2=40。
蜗轮与云台是一体的,因此蜗轮与云台的速比i3=1。
总传动比i=i1×i2×i3=1×40×1=40。
通过以上设计计算,选择输出扭矩为0.8 N·m的驱动电机,采用减速比为40∶1传动机构,能够满足云台负载扭矩的要求。
3 问题解决
3.1 蜗轮蜗杆副侧隙问题
由于光电观察设备具有高稳定性的要求,而蜗轮蜗杆传动副之间的侧隙使系统在反转时存在空回现象,会使控制系统存在非线性,对设备的观察质量有很大的影响。因此,如何消除传动副侧隙是需要解决的一个问题[3]。
在本设计中,采用了OTT分段式蜗杆传动的方法,如图5所示。对蜗杆进行了剖分式设计,其由一半的蜗杆轴和一半的空心蜗杆组成,同时需要通过对蜗轮齿面进行合理的修形,使其适应蜗杆。
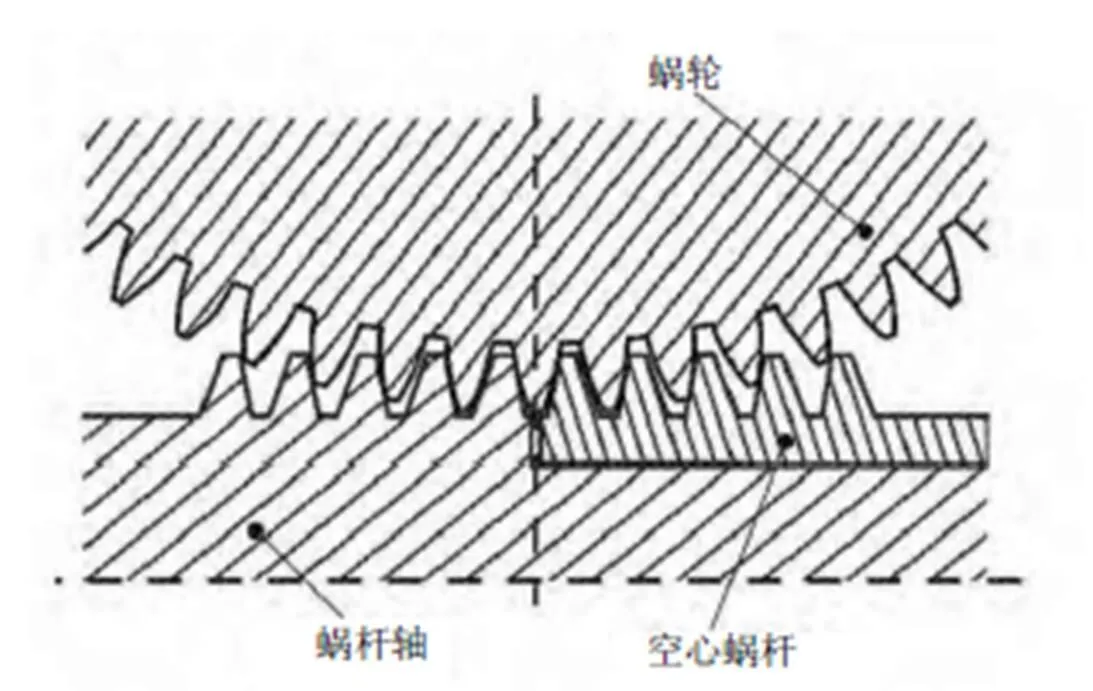
图5 OTT分段式蜗杆
在装配调整时,将蜗杆轴固定,使空心蜗杆承受一定的轴向预紧力。旋转空心蜗杆使两段蜗杆的工作面都与蜗轮齿面接触,设置好侧隙,然后用涨紧套将两段蜗杆连接固定。该种方法可以使齿面磨损后重新进行调整至理想的位置。
德国OTT公司的分段式圆柱蜗杆传动,如图6所示,其原理是蜗杆轴的右侧齿面为工作面,空心蜗杆的左侧齿面为工作面。当蜗杆轴右侧齿面推动蜗轮逆时针转动时,空心蜗杆的左侧齿面会受到蜗轮的回程冲击,同理当空心蜗杆左侧齿面推动蜗轮顺时针旋转时,蜗杆轴右侧齿面会承受蜗轮的回程冲击,这样就实现了反向旋转时的空回消除。

图6 德国OTT公司的分段式圆柱蜗杆
3.2 载荷配重问题
车载观察设备云台常为动态环境下工作,其自锁功能利用了蜗轮蜗杆副的自锁特性,但如果其负载的重心偏离旋转轴线,会存在一定的转动力矩,运动过程中其转动惯量会一直变化,在长时间的振动冲击下,其误差将会越来越大,也会影响其寿命,所以在进行设计和装配调试过程中必然要考虑平衡问题。然而在设计时平衡很难做到,只能在后期的装配过程中通过增减配重的方法进行配平衡,从而保证传动机构的平稳运行[4]。
4 结束语
车载自锁式云台作为光电观察设备的稳定平台,对光电设备的正常工作具有非常重要的意义。作为车载设备,其不但对设计具有较高的要求,对零部件加工的工艺性、装配的工艺性也有很高的要求,同时对蜗轮蜗杆传动机构的摩擦力矩、谐振频率都有严格要求。本文不但对设计过程、方法和原理进行了论述和理论性的计算,同时对存在问题的解决思路进行了叙述,为后续相关产品的开发、改进优化提供了思路和参考依据。
[1]王进戈,陈永洪,邓星桥,等. 侧隙可调式蜗杆传动综述[J]. 西华大学学报,2014,33(4):15-19.
[2]仇天任. 精密蜗轮付的配磨[J]. 上海机械,1980(3):12-15.
[3]常远. 齿轮传动与蜗轮蜗杆传动性能比较与消隙机构[J]. 电子工业专用设备,2007,36(1):73-76.
[4]朱正平. 蜗杆蜗轮机构的自锁性及其失效原因分析[J]. 中国新技术新产品,2016(14):43-44.
Design of A Car-Mounted Self-Locking Gimbal
Chen Wenping1Yang Keming2
1. Henan Institute of Technology, Henan Xinxiang 453000 2. Xinxiang North Vehicle Meter Co., Ltd., Henan Xinxiang 453000
The gimbal is used as the carrier of the machine-optical integrated observation device. Through the control of the servo motor, the photoelectric observation device is driven to rotate in the horizontal direction and the pitch in the high and low directions. The vehicle-mounted pan/tilt is a photovoltaic platform that works in a dynamic environment. In addition to the above functions, stability and self-locking requirements are required. In view of the above problems, the worm gear drive principle and self-locking characteristics are adopted in the structural design, and the feasibility of the design is verified by the method of calculation and analysis, and the solution to the existing problems is proposed.
cloud platform; photoelectric platform; worm gear pair; stability; self-locking
TP391.4
A
