基于物—场模型的飞行模拟器运动系统结构优化设计
2018-11-13
(航天恒星科技有限公司,北京100086)
0 引言
飞行模拟器是一种较为复杂的地面仿真设备,与真实飞行器相比,飞行模拟器在飞机特性研究和飞行员培训方面具有成本低、耗时少、安全性高、应用灵活等优点[1-3]。它通常由模拟座舱、运动系统、视景系统、计算机系统及控制台等五大部分组成。其中,运动系统负责提供飞行运动过程中飞行员需要体验到的俯仰、滚转、偏航、升降、纵向平移和测向平移的六自由度顺势过载动感,重力分量的持续感及部分冲击抖动体验,使飞行仿真过程更加逼近真实飞行,其性能的优劣将直接关系到飞行模拟的逼真度[4]。自1965年,D.Stewart提出将并联六自由度机构用作训练飞机驾驶员的飞行模拟器以来,这种由上下平台和6根驱动杆组成的并联机构被普遍应用于飞行模拟器的运动系统之中。尽管并联机构的实际应用和理论研究取得了大量的研究成果,但是在运动学、奇异性、动力学方面仍然存在一些有挑战性的问题,机构运动求解的算法过于复杂且没有统一高效的解算办法,同时,其运动模拟幅度小,过载加速度偏低,过载持续时间短,逼真度不够,限制了其应用范围[5-8]。如果能够从机构上转化模型,将能改变这一现状,因此,本文在TRIZ理论物-场模型原理基础上,简化物—场模型并对并联六自由度模拟器进行优化,提出一种多自由度飞行模拟运动机构模型,并以此验证物—场模型简化办法在系统创新改进方面的优势。
1 物—场模型及其求解过程
物—场模型分析方法是TRIZ理论中一种重要的发明问题分析工具,它将所有的功能分解为3个基本要素:2种物质和1种场,3种基本要素相互作用,可以简洁描述和分析问题,并且可以采用76个标准解进行求解[9-10]。
复杂系统可以相应用复杂的物—场模型进行描述,通常构造物—场模型有以下4步[5]:
1)识别元件。根据问题所在的区域和问题的表现,确定造成问题的相关元素,即查找物体S1、S2和作用其上的场F。
2)构建模型。根据第一步的找到的相关元素绘制出问题所在的物—场模型,并判别系统的完整性、有效性。如果缺少组成系统的某元件,要尽快确定它。模型反映出的问题应与实际问题一致。
3)选择解法。根据物—场模型所表现出的问题,应用一般解法或从76种标准解法中选择一个最恰当的解法。如果有多个解法,则逐一对比,寻找最佳解法。
4)发展概念。在考虑各种限制条件的情况下,将找到的解法与实际问题对照处理,应用于设计过程中,获得最终解决方案。
图1的流程图指出了运用物—场模型实施创新的过程。这个循环过程不断重复第三步和第四步,直至建立出一个完整模型。
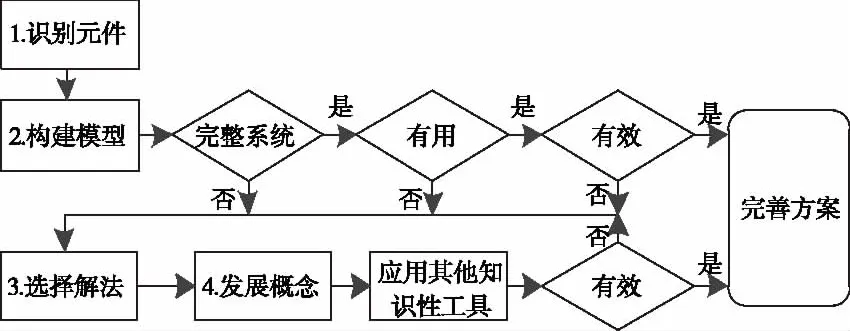
图1 物—场模型问题解决流程图
其中,76种标准解法分成5级,各级中解法的先后顺序反映了技术系统必然的进化过程和进化方向,每级中又分为数量不等的多个子级,共有18个子级,每个子级代表着一个可选的问题解决方向。5级标准解法特征如表1。

表1标准解法特征
TRIZ理论中,常见的物—场模型的类型有4种:有效完整模型、不完整模型、效应不足的完整模型、有害效应的完整模型。其中后3者是需要得到解决的问题。
在处理实际问题过程中,直接采用76种标准解法常常会增加问题处理的困难程度,为了简化工作量,可采用表2中抽象提取的物—场分析6种一般解法去应对常规发明问题。
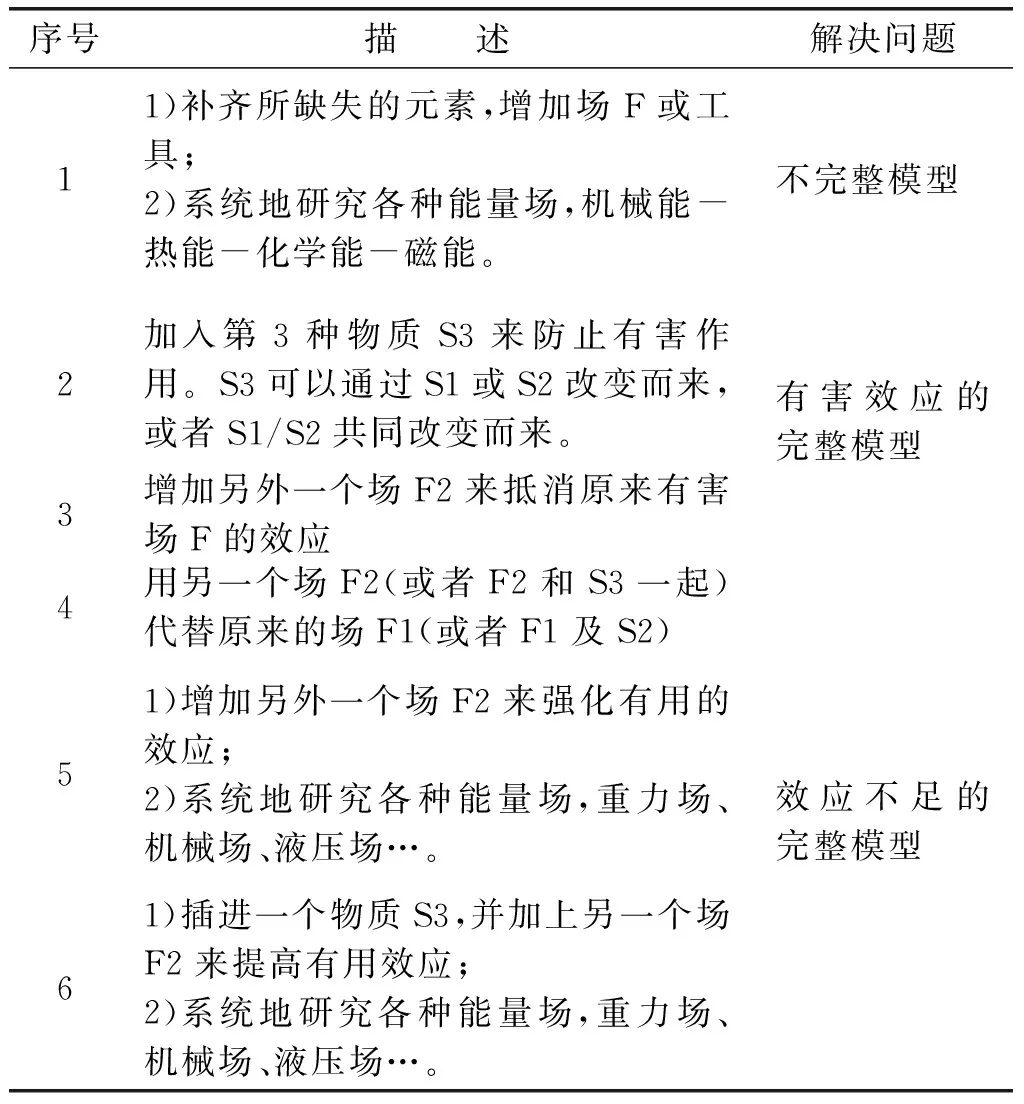
表2物-场模型一般解法
2 基于物—场模型的飞行模拟器运动系统结构设计
2.1 问题分析
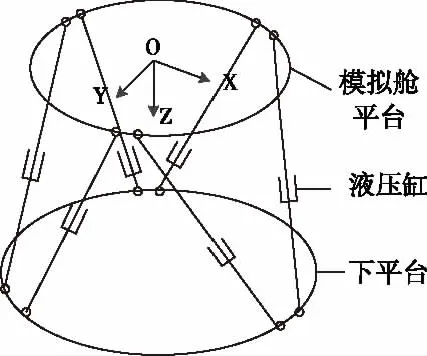
图2 六自由度运动平台 结构简图
运动系统负责提供飞行运动过程中飞行员需要体验到的俯仰、滚转、偏航、升降、纵向平移和测向平移的六自由度顺势过载动感,重力分量的持续感及部分冲击抖动体验,目前广泛使用的传统6-TPS机构原理如图2,通过对6个液压缸的伸缩控制来实现上述部分动作要求。由于液压缸支腿以及其他实体结构的干涉作用,导致上平台无法实现水平方向和垂直方向360°旋转和滚转运动,无法模拟飞机可能需要的空中翻滚和持续加速等过程;同时,它还导致其动感模拟洗出算法要考虑在使飞行模拟器在完成一次突发运动后,必须能缓慢回到中立位置,为下一次运动做好准备等问题[7];整个机构设计缺陷也导致其无法模拟长时段高过载动感和重力分量的持续感,运动学正解比较困难,且解不唯一等问题。
为了提高飞行模拟器的逼真度,拓展其应用范围,需要优化的主要问题可以归结为两方面:1)实现水平方向和竖直方向360°连续旋转运动;2)提供持续过载动感,并能实现过载的宽幅调节。
2.2 构建物—场模型

图3 原系统物-场模型
并联六自由度运动平台的工作原理是下平台固定,通过控制液压缸支腿的伸缩,使支腿绕上下平台的万向铰链转动,进而控制上平台完成竖直和水平方向一定角度的俯仰和旋转动作,根据问题分析过程可知,下平台S2能液压支腿铰链装置F1控制上平台S1完成部分短时段逼真感运动,无法模拟运动复杂性要求较高的飞行模拟器所需要的水平方向和垂直方向360°旋转和滚转运动,以及提供持续过载动感等逼真感要求。其过程存在:两种物质——模拟舱平台和下平台;一种场(机械场)——液压支腿伸缩过程。该问题是一个效应不足的完整模型,其模型简图如图3。
2.3 选择物—场模型的简化解法及其简化过程
对照表2,该效应不足的完整模型的一般解法有4,5,6三种。为了不增加系统复杂性、计算成本和物—场成本,排除必须增加场才能提供所需功能的前提下,不建议采用表2中的5、6解法,模型可得到简化,系统改进如图4所示。
对于问题的第一个方面——实现模拟舱水平方向和竖直方向360°连续旋转运动,即是要使其完成X、Y、Z三轴旋转运动,需要完成两项任务:1)克服原模型液压支腿干涉过程,实现模拟舱的支撑;2)实现模拟舱平台绕三轴360°可连续旋转驱动过程。根据图4,先确定可利用场,才能根据知识库中现有技术所能提供的有效模型进行匹配,可利用的场有重力场、磁场、气动场、液压场、机械场,可得到的模型描述如表3。
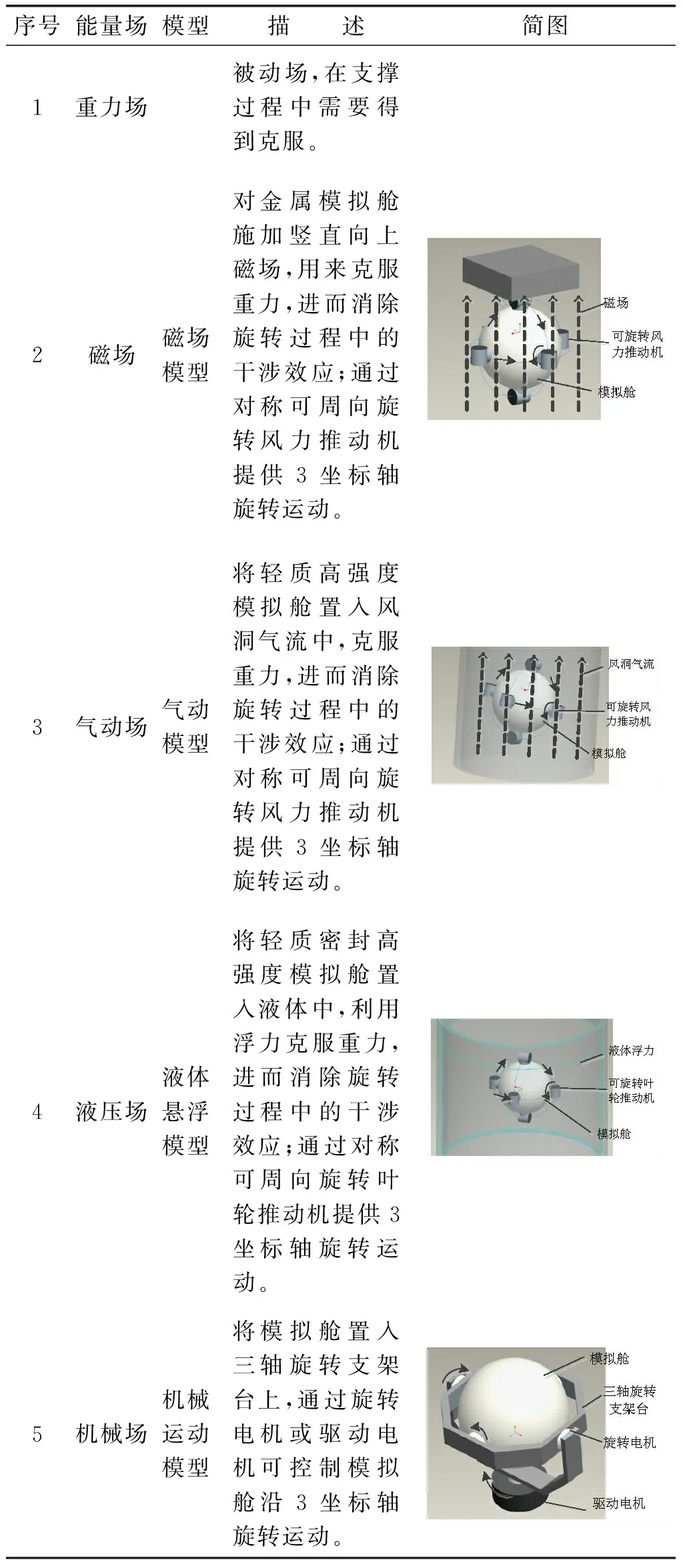
表3可用模型
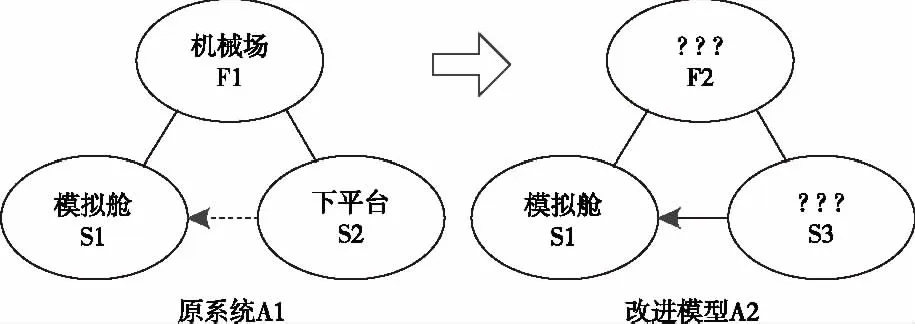
图4 系统改进
如果不考虑技术实现代价,表3中的4种方案均能实现模拟舱三坐标轴360°连续旋转运动,进而解决问题的第一个方面。
对于问题的第二个方面——提供持续过载动感以及实现过载的宽幅调节,要考虑的问题是:飞行过程中产生人体生理过载是由飞机动力矢量变化使人体在惯性作用下产生的反应,对于这一问题的复现,模拟舱的运动矢量也要让人体惯性在动态环境下体现出来,由于模拟空间有限,必须向超系统[10]拓展,增加场F3和约束驱动物体S4,需要对图4模型进行强化,其模型转化如图5。
图5 系统改进
搜索知识库,能够利用的有效能量场有机械场、电场和磁场可为改进模型提供离心力,才能模拟人在动态条件下的惯性持续过载动感状态,而电场和磁场模拟需要模拟舱外部带大量电荷来提供库仑力或洛仑兹力,系统危险性加大,不建议采用。只剩下采用机械场,并通过物理器件连接,为改进系统A2提供离心力,从而模拟持续过载动感和过载调节。
参考表3的4个方案,若通过物理器件连接改进系统A2,则表3中的方案2、3、4均难以给S1和S3提供同步动态矢量运动,只剩下方案5可以完成这一目标。
2.4 方案完善过程
由上述推理过程可知,图4中采用表3的方案5改进系统A2:能量场F2为机械场(三轴旋转支架旋转驱动过程),物体S3为驱动电机支持器件。在图5的改进系统A3中,机械场F3控制S1、S3和F2组成的A2系统在底座支持器件S4的驱动下绕S4做旋转运动,使A2系统产生离心力作用。其方案Pro-E建模简化模型如图6。

图6 模型简图
该机构工作过程:驱动底座下部固定,上部通过驱动电机或液压马达驱动吊臂旋转,使模拟舱产生离心力,控制系统控制三轴旋转支架绕3个坐标轴旋转,完成生理矢量过载与视景显示的自适应过程,对于振动效果则由模拟舱内座舱振动机构提供。
对比传统6-TPS运动平台,该机构模型的明显优势有:在三轴旋转支架的驱动下可为模拟舱提供三坐标360°连续旋转运动;驱动底座控制吊臂的旋转运动可为模拟舱提供持续过载动感,并能实现过载的宽幅调节;由于实现了连续运转过程,其洗出算法和求解过程也随之得到模型简化;在旋转吊臂静止条件下可模拟6-TPS运动平台的工作要求,在旋转吊臂可变运动条件下可模拟战斗机等其他设备高难度动作,拓展了其应用性能。
3 结束语
物—场模型分析方法是TRIZ理论关于发明创造问题的一种分析工具[10]。本文在TRIZ理论中的物-场模型原理基础上,简化模型并对目标进行模型优化,提出了一种新型多自由度飞行模拟运动机构模型,验证了物-场模型简化办法在系统创新改进方面所具有的显著优势。