稳定平台角度采集及模拟调节系统
2018-11-09穆海琴
穆海琴
(国营大众机械厂军品第一研究所,山西 太原 030024)
0 引言
本项目需研发一种能自动采集稳定平台的偏转角度,实时显示并模拟对平台的角度控制的系统。主要应用于作业车辆在野外不同路况执行任务时[1],通过控制使稳定平台自动调整保持水平,保证平台上设备的数据采集、处理等工作更加准确。
根据项目要求系统由供电部分、信号采集部分、控制部分、信号缓冲部分、电机驱动部分五部分组成。
1 供电部分电路设计
本系统采用24 V电源供电,各个模块的正常工作所需电压通过相应电路产生,具体采用如下方案:采用24 V电压直接为电机供电,使其正常工作;将24 V电压经过DC/DC模块稳压后输出稳定的5 V和12 V,5 V给单片机和倾角传感器供电,12 V给电机驱动电路供电,电源分配如图1所示。
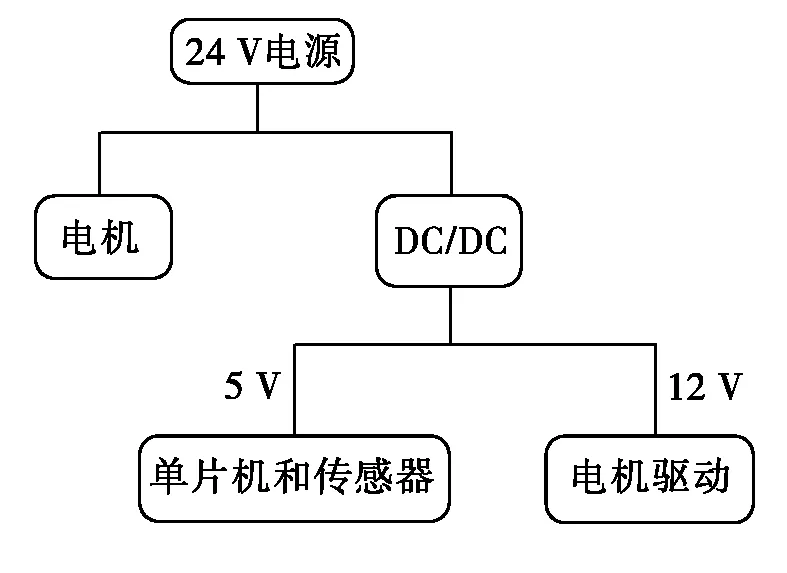
图1 电源分配图
2 信号采集部分电路设计
信号采集采用的是瑞丰科技生产的LAC326T双轴数字输出型倾角传感器,它是RION公司推出的新一代数字型小体积MEMS倾角传感器,内置加速度计,通过测量静态重力加速度,转换成倾角变化。从而可以测量传感器输出相对于水平面的倾斜和俯仰角度,它的输出方式是RS485接口。由于内置MCU控制系统[2],使传感器输出线性度得到二次修正,弥补了模拟型的因为修正不够导致的精度下降。
3 控制部分电路设计
控制器主要用于倾角传感器信号的接收和辨认,控制伸缩杆的电机动作,控制显示倾角角度。本项目选用的是STC15W4K32S4作为主控芯片,单片机接收从倾角传感器输入的逻辑信号和脉冲信号,并将输入的信号进行处理运算,完成各项任务要求。当传感器检测到平台的横滚和俯仰的倾角时[3],系统需要将平台的状态及时地以电信号的形式反馈到数据处理部分,对数据进行运算处理,从而产生控制信号对电机等各单元进行控制使平台保持平衡。控制环节如图2所示。

图2 控制部分框图
4 信号缓冲部分电路设计
缓冲部分采用的是74HC245缓冲芯片,是典型的CMOS型三态缓冲门电路[4]。由于单片机或CPU的数据/地址/控制总线端口都有一定的负载能力,如果负载超过其负载能力,一般应加驱动器。74HC245是方向可控的八路缓冲器,主要用于实现数据总线的双向异步通信[5]。
5 电机驱动部分电路设计
由于使用L293或L298等全桥芯片来控制直流电机时,虽然简便且成本低廉,但由于它们的内阻较大,在控制大电流的马达时芯片常常过热,导致系统的整体效率较低。使用分立元件搭建的H桥,比如桥臂驱动芯片配合N沟道MOSFET[6],能够达到非常大的负载电流和非常高的频率,而且可以更换器件,从而具备更多的可定制性。因此采用IR2104半桥驱动器和IRF540组成全桥驱动电路。
6 关键技术及解决办法
本设计中,为了能够使通信距离传输更远,提高抗干扰性和抗噪声性能,传感器接口采用的是RS485接口,中间通过购买的成品RS485转TTL模块,才能使采集到的信号传输到单片机中,从而进行后续的控制过程。
