基于超宽带定位系统多基站表决的非视距基站筛选算法
2018-11-09朱岱寅曹欲晓
◆俞 翔 朱岱寅 杨 庆 曹欲晓
基于超宽带定位系统多基站表决的非视距基站筛选算法
◆俞 翔1,2朱岱寅2杨 庆1曹欲晓1
(1.南京工程学院计算机工程学院 江苏 211167;2.南京航空航天大学电子信息工程学院 江苏 210016)
UWB定位系统应用中经常出现电磁波非视距传播现象,该现象导致利用UWB系统对标签定位产生了较大的估计误差。本文针对该问题提出了一种基于多基站表决的非视距基站筛选算法,该算法利用了多基站协同定位的冗余性,以及非视距基站参与定位时引入的定位估值偏差,估计场景内不同基站组合对标签的定位值并统计各分组的标准差,从而根据该定位估值标准差筛选出非视距基站。UWB实测数据的处理结果表明,该算法在现有硬件基础上,可以较为准确地筛选出非视距基站,从而提高UWB系统的定位精度。
超宽带;多基站表决;非视距传播;基站筛选;协同定位
0 引言
随着智能制造和物联网技术对目标定位性能需求的不断提高,近年来室内精确定位技术成为了研究热点。在众多室内定位技术中,超宽带(ultra-wideband,UWB)定位技术以其极高的距离分辨率、大带宽和低率谱密度等特点[1,2]受到人们的重视,并在工业领域得到了较为广泛的应用。
目前经典的UWB定位原理可分为两类,第一类是基于波达角度(angle of arrival,AOA)的位置估计算法,该类算法通过接收端的阵列天线测量发射端信号的到达方向和时间,从而估计发射端的位置,算法精度受限于波束赋形和波达角估计等关键技术。第二类是基于波达时间(time/time difference of arrival,TOA/TDOA)的位置估计算法,该类算法通过测量多个发射端到接收端电波飞行时间,从而估计接收端的相对位置,该类算法与UWB技术的高距离分辨率特点结合,可获得更好的定位性能。
值得注意的是,上述两类定位方法理论上都假设接收端与发射端的径向没有障碍物的遮挡,即测量的是两者径向距离[3]。在UWB系统中,发射端和接收端通常被称为基站和标签,下面我们沿用此惯例。在UWB定位系统的应用场景中,径向遮挡情况经常发生,而电磁波的非视距(Non-line-of-sigh,NLOS)传播会导致UWB定位性能明显下降[4-6]。因此,NLOS传播检测一直是UWB定位问题中的研究热点,现有文献主要从两个方面对其探讨,其一是从UWB信号物理层面,如文献[7][8]基于信号的相位或幅度参数深入研究了NLOS传播检测问题,其中文献[7]算法收敛速度较慢,而文献[8]算法精度一般;其二是从UWB应用层面,如文献[9][10]利用多基站协同定位并综合了多基站在定位系统中的交互关系,提升目标的定位精度。本文提出了一种基于多基站表决的NLOS基站筛选算法,本算法利用了多基站协同定位的冗余性,统计出基站序列的组合并根据每一组基站的测距值对标签多次定位,通过统计多次定位的标准差筛选出NLOS基站。测距是定位的基础,下面我们首先分析测距误差。
1 UWB测距误差分析
2 基于多基站表决的NLOS基站筛选算法
2.1 基于最小二乘法的坐标估计

将式(3)写成矩阵形式:
其中:


经推导可得标签坐标的最小二乘解为:
2.2 基于多基站表决的NLOS基站筛选算法原理及流程

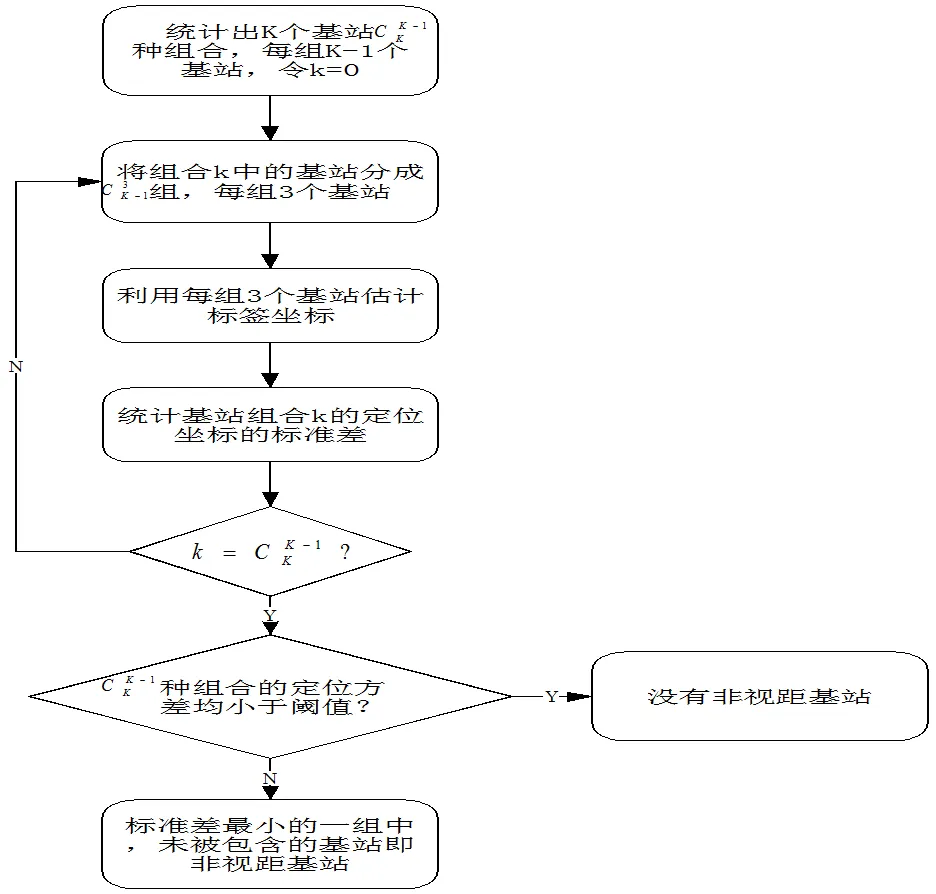
图1 基于UWB多基站表决的非视距基站筛选算法流程图
3 实验验证与分析
在上一节中,我们介绍了一种基于多基站表决的非视距基站筛选算法,本节将利用UWB实测数据验证并分析该算法。为便于分析,我们将实验场景设定在2维空间,场景中有6个UWB基站,如图2中红色方框所示,其坐标分别为A1(4,0)、A2(8,0)、A3(12,3)、A4(8,6)、A5(4,6)、A6(0,3),蓝色五角星表示标签T1(2,2)。

图2 基站与标签的几何分布

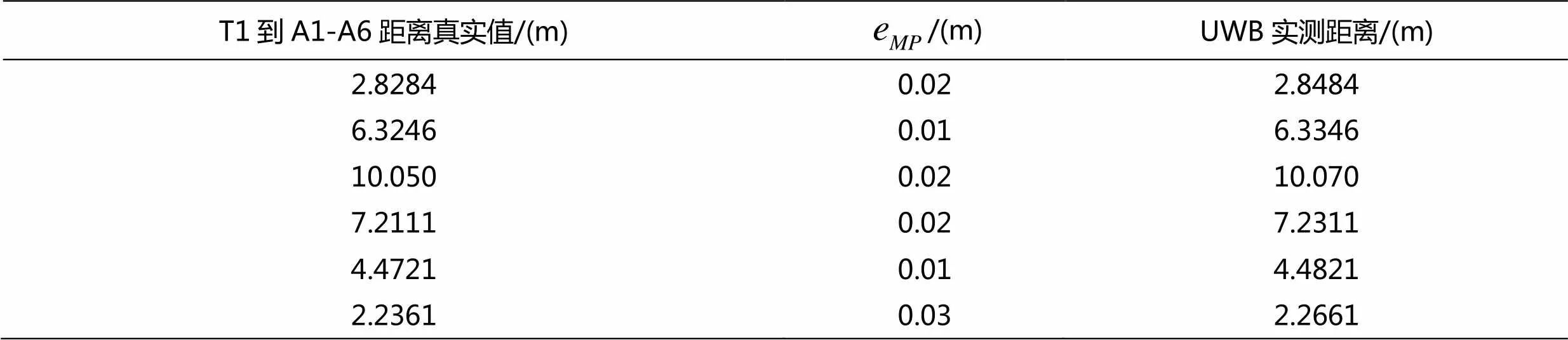
表1 实测距离数据

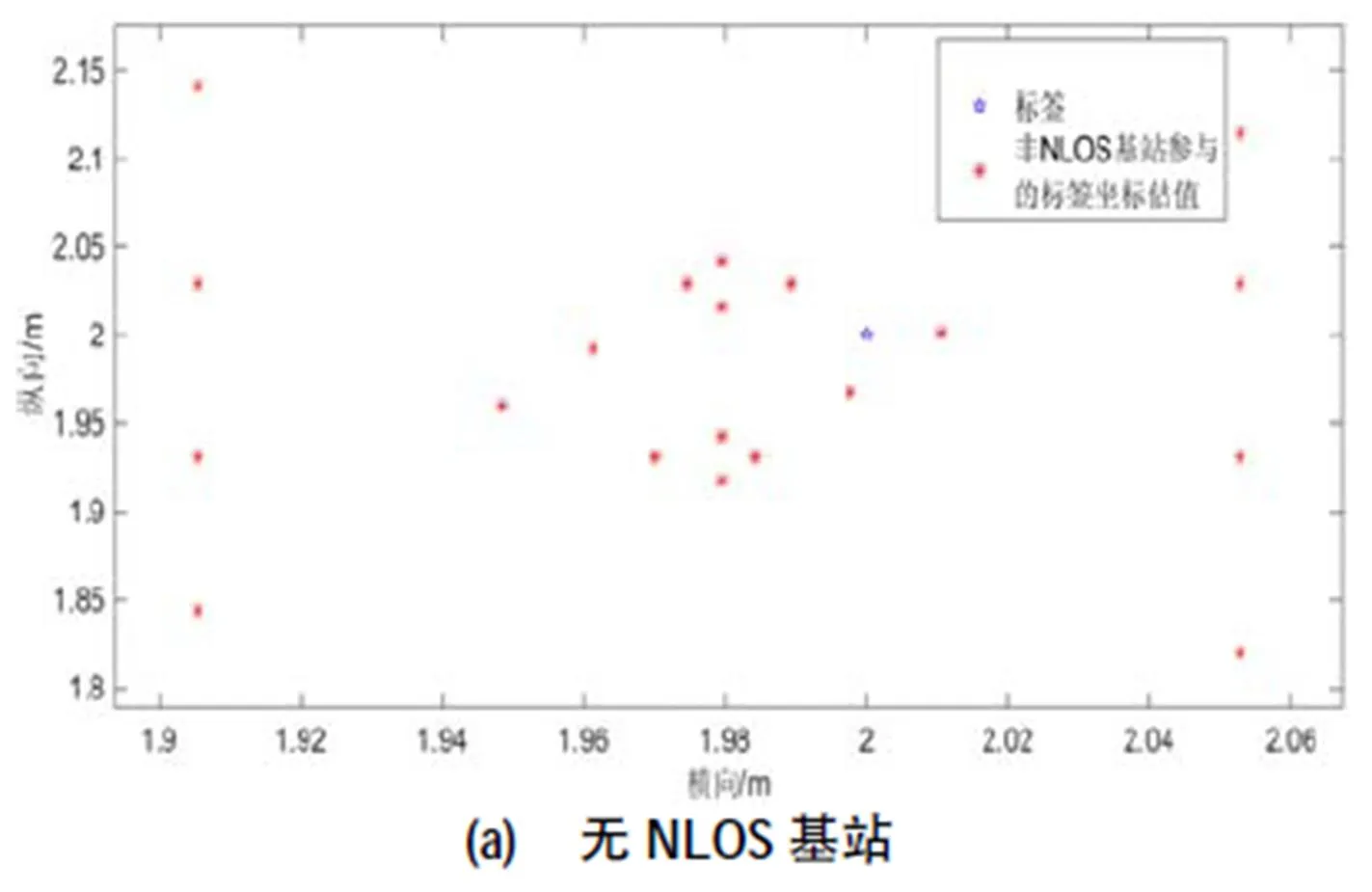
进一步,我们基于上述3种情况的坐标估值分别统计出6种组合的定位标准差,如表2所示.。
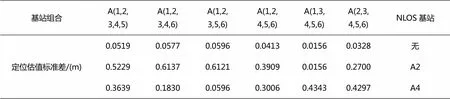
表2 定位估值标准差及NLOS基站筛选结果
4 结论
本文针对电磁波NLOS传播现象导致UWB定位系统性能下降的问题,提出了一种基于多基站表决的NLOS基站筛选算法。该算法利用了多基站协同定位的冗余性,通过统计不同基站组合定位估值的标准差筛选出NLOS基站。UWB实测数据的处理结果表明,该算法可以较为准确地筛选出单个NLOS基站。后续我们将针对多个NLOS基站的情况对该算法做进一步改进。
[1]Wymeersch H,Maranos,Gifford W M, et al. A machine learning approach to ranging error mitigation for UWB localization[J].IEEE Transactions on Communications,2012.
[2]Stephan A,Gueguen E,Crussiere M,et al.Optimization of linear preceded OFDM for high-data-rate UWB systems[J].EURASIP Journal on Wireless Communications and Networking,2008.
[3]Cassioli D,Win M Z,Vatalaro F,et al.Low complexity rake receivers in ultra-wideband channels[J]. IEEE Transactions on Wireless Communications,2007.
[4]Haneda K,Richter A,Molisch A F.Modeling the frequency dependence of ultra-wideband spatio-temporal indoor radio channels[J].IEEE Transactions on Antennas and Propagation,2012.
[5]Lee J Y,Yoo S.Large error performance of UWB ranging in multipath and multiuser environments[J].IEEE Transactions on Microwave Theory and Techniques,2006.
[6]Xiao Z,Wen H,Mark Ham A,et al.Non-line-of-sight identification and mitigation using received signal strength [J].IEEE Transactions on Wireless Communications,2015.
[7]Alavi B,Pahlavan K.Modeling of the TOA-based distance measurement error using UWB indoor radio measurements[J].IEEE Communications Letters,2006.
[8]Shen G,Zetik R,Hirsch O,et al.Range-based localization for UWB sensor networks in realistic environments[J].EURASIP Journal on Wireless Communications and Networking,2010.
[9]Wymeersch H,Lien J,Win M Z.Cooperative localization in wireless networks [J].Proceedings of the IEEE,2009.
[10]Shen Y,Mazuelas S,Win M Z.Cooperative network navigation:fundamental limit and its geometrical interpretation[J].IEEE Journal on Selected Areas in Communications,2012.
[11]Lee J Y,Scholtz R.Ranging in a dense multipath environment using an UWB radio link[J].IEEE Journal on Selected Areas in Communications,2002.
江苏省自然科学基金青年基金(BK20150730)、南京工程学院人才引进科研启动基金项目(YKJ201424)和重点大学基础研究基金(NZ2016105)资助。
