基于stm32的物流机器人设计
2018-11-08王洪玺
王洪玺
(山东省淄博第四中学,山东淄博,255100)
0 引言
近几年来,国内物流机器人产业的高速增长从根本上提升了物流体系的运行效率,对中国制造业带来深远影响。随着物流行业的日益发展,物流搬运市场对物流运力的要求也日益增加,如果仅仅依靠人力来搬运货物,不仅工作效率低,而且人力成本大大增加,因此人力运货已经远远不能满足市场的需求[1]。鉴于这样一种现状,本人在参加了Robomaster2018机器人夏令营的过程中,作为小组的嵌入式成员,对小组设计的机器人进行延伸,从而设计得到一种集抓取、暂存、运输物资等多功能于一体的物流机器人,这款物流机器人在提升搬运物资效率方面能够发挥较大的作用。
1 系统概述
本文设计出一种车体灵巧、操作便捷、人机交互优越的智能物流机器人。本机器人采用STM32F427芯片作为主芯片,以满足多功能任务处理。机器人外接碰撞传感器和陀螺仪,可增加红外测距传感器以扩展自动对位功能,用来抓取、暂存、运输物资。相机图传模块发送端的前视相机模组采集机器人前方1080P@60hz的图像,采集到的图像实时传送到相机图传模块接收端。通过HDMI可接入显示器,显示器可以显示实时图像,亦可通过视频采集卡接入到计算机。机器人由车体、人机交互、感受系统、驱动系统、机械结构系统组成。操作人员通过人机互动界面,来根据现场情况做出相应的操作。
2 机械结构设计
2.1 底盘设计
在实际物流物资运送的过程中,需要对物流机器人下达多项指令,并完成多个动作。因此,物流机器人的车体结构设计考虑应满足在平整路面灵活运动。综合以上所有技术要求,本设计车体底盘优选麦克纳姆轮全向移动平台。
麦克纳姆轮采用的是全方位移动方式,它是基于一个有许多位于机轮周边的轮轴的中心轮的原理上,这些成角度的周边轮轴把一部分的机轮转向力转化到一个机轮法向力上面。 依靠各自机轮的方向和速度,这些力的最终合成在任何要求的方向上产生一个合力矢量从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。在它的轮缘上斜向分布着许多小滚子,故轮子可以横向滑移。小滚子的母线很特殊,当轮子绕着固定的轮心轴转动时,各个小滚子的包络线为圆柱面,所以该轮能够连续地向前滚动。
麦克纳姆轮与普通轮子之前的区别主要在于:其圆周上分布有若干与轮子轴线呈45°夹角的辊子,在转动过程中棍子可以一直与地面保持接触。这些辊子可以独立自由转动,这样一来,轮子只受地面对辊子向上的力,而辊子与轮子轴线呈45°夹角,因此轮子与地面的接触力便不再是沿轮子的方向,而是与之呈45°角。由四个麦克纳姆轮便可以组成不同的受力情况,从而使平台可以实现平面上前后左右平移、原地旋转三个自由度的移动[2]。
2.2 抓取结构设计
笔者团队对基于stm32的物流机器人进行了精心的结构设计,最后得到基于stm32的物流机器人实拍图如图1所示。
2.2.1 抓取结构
抓取结构设计方案为:小机械臂夹取物块两个短边后上升,大机械臂夹住物块两个长边上升的物块并且小机械臂松开,然后小机械臂进行第二块物块夹取并重复上述动作。优点:简单方便,容易操作,可以储存多个物块。
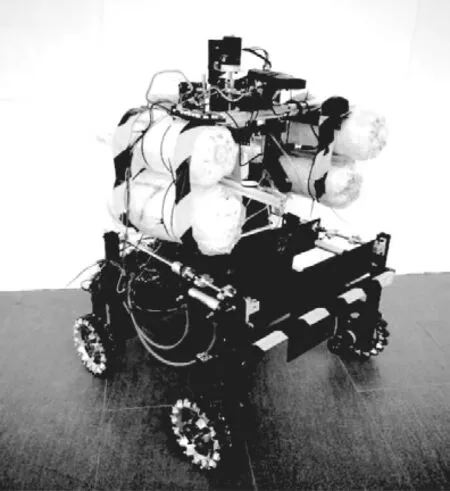
图1 基于stm32的物流机器人实拍图
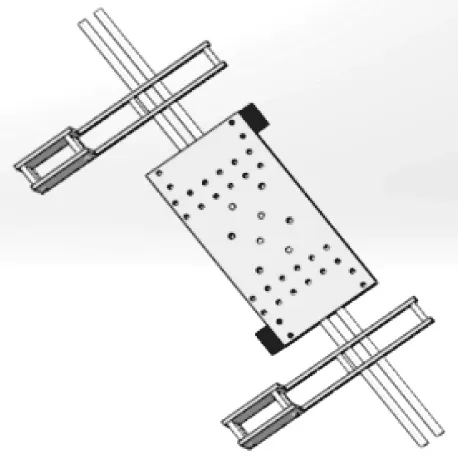
图2 小机械臂结构图
经过实验表明,小机械臂结构的优点是 可以使用气压或电机驱动,能够平行夹取物品,运行比较稳定,效率也较高。
经过实验表明,大机械臂结构的的优点是可以使用气压或电机驱动,能够平行夹取物品,运行比较稳定,效率也较高。其缺点是存块达到一定数量时会因为摩擦力不够而下滑。
2.2.2 升降结构
机器人采用丝杆升降的方式,丝杠升降有无背性,高刚性,高耐受性,传动效率高等等优点,但是因为丝杆的不易固定和3508减速比的原因,使丝杆的特性没法完全表现出来。如图4所示。
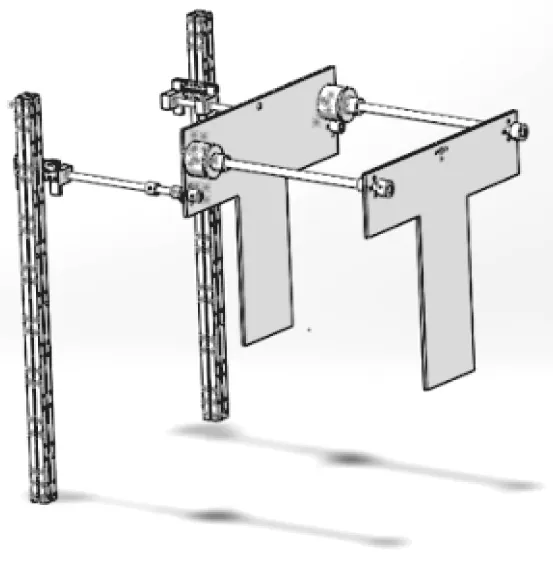
图3 大机械臂结构图

图4 升降结构
3 控制系统硬件设计
机器人以STM32F427芯片为核心的控制板来实现功能。机器人主要由控制板、传感器、图传模块、电机驱动模块等组成。其主要任务是:通过遥控器接收端读取操作信号,通过速度式pid计算出电流,并通过can总线发送到到底盘电机电调。大小机械臂可由气压驱动,也可改装为电机或舵机驱动。控制小机械臂升降的丝杆由顶部3508电机驱动,通过速度位置双环pid实现精确控制。读取各个传感器数值并将其传送回操作端。传感器能够测得车体倾角、前后障碍距离等。升降机械臂具有紧急刹车能力,为了防止操作小机械臂升降时过度操作导致机械结构损坏,在小机械臂合理的升降范围的上下边界各放置一个碰撞传感器,以实现限位。
4 抓取任务流程
机器人抓取线程如图5所示,先进行初始化。初始化完成后进入循环,周期延时为5ms。
通过与副板通信实现对相机俯仰的控制,控制电机驱动丝杆从而控制小机械臂的升降。在小 机械臂运行到底部或顶部时,先停止升降以保护结构,后通过判断大小机械臂的状态,自动判断夹取、放置、呈递或交接物资。具体判断方法是:通过一个两元素数组分别存储大小机械臂中的物资数量,在每一次机械臂操作时(包括自动操作和应急操作)更新数组中对应元素数值。接下来,处理可能出现的应急处理命令,最后以长为5ms的延时结束本次循环。

图5 机器人抓取线程
5 小结
笔者基于STM32F427单片机及麦克纳姆轮全向移动平台的集抓取、暂存、运输物资等多功能于一体的物流机器人,其主特点是:可实现多功能任务同时处理、使用便捷、工作效率高。对于物流机器人的设计具有一定参考价值。相信在不久的将来,笔者可以研发一款智能物流机器人,通过摄像头、激光雷达等硬件支持,通过导航算法,构建机器人周围环境的三维地图,使机器人布置路径更加灵活,调试更加容易。
