基于机器视觉的纺纱管颜色分拣算法研究
2018-11-08张团善冀永乐颜亚飞蒙春学
张 帆, 张团善, 冀永乐, 颜亚飞,蒙春学
(西安工程大学 机电工程学院,陕西 西安 710048)
0 引 言
纺织行业在我国作为传统行业,高度依赖人工方式对纺织纱管的颜色进行分拣,人工方式虽然能够保证分拣的准确性,但人工方式的效率低下,而且会增加纺织企业的劳动成本.
目前,许多学者都对纱管的分拣系统及算法进行了研究.在系统自学习方面,主要有李峰等设计的自动理管机控制系统[1].刘志辉等结合支持向量机建立了颜色识别预测模型[2].在智能识别方面,余海波等提出了一种基于计算机软件提高纱管分拣精度的方法[3].黄长存等基于机器视觉实现了对纺织纱管的精确分拣[4].孙敏霞等提出基于颜色识别的嵌入式筒管分拣系统设计[5].刘志辉采用的色差算法及黄长存、孙敏霞采用的欧式距离法检测纱管颜色时,虽然能提高纱管分拣的精度及效率,但该方法并没有有效解决图像采集过程的色偏问题,且算法相对复杂,在依据颜色分拣时,欧式距离法会导致颜色分量不同但结果却一致的现象发生,检测结果正确率不高.
基于机器视觉提出一种关于纺织纱管颜色分拣的算法,在保证分拣精度及效率的基础上,采用多帧图像平均法背景建模,利用背景差分法[6]获取纱管目标图像,针对图像获取时产生的色偏现象[7],提出一种色偏纠正算法,可有效纠正色偏,获得颜色鲜明的彩色图像,并依据实验对比,采用双边滤波算法很好地滤除噪音[8],且得到的目标能够很好的保留边缘细节.进而采用改进色差法进行颜色分拣[9-10].该分拣算法具有计算简单、识别正确率高、可移植性强等优点.
1 图像预处理
1.1 图像的获取
照明方案的设置对提取到的彩色图像质量有较大影响,在配置光源时要考虑的因素包括:使目标图像与背景的对比度明显,尽可能地减少反射;减少图像噪声,图像尽可能不失真.针对纱管颜色单一的特征,采用前向照明,将光源与摄像头都安装在同侧,且都安装在被检测目标的正上方.
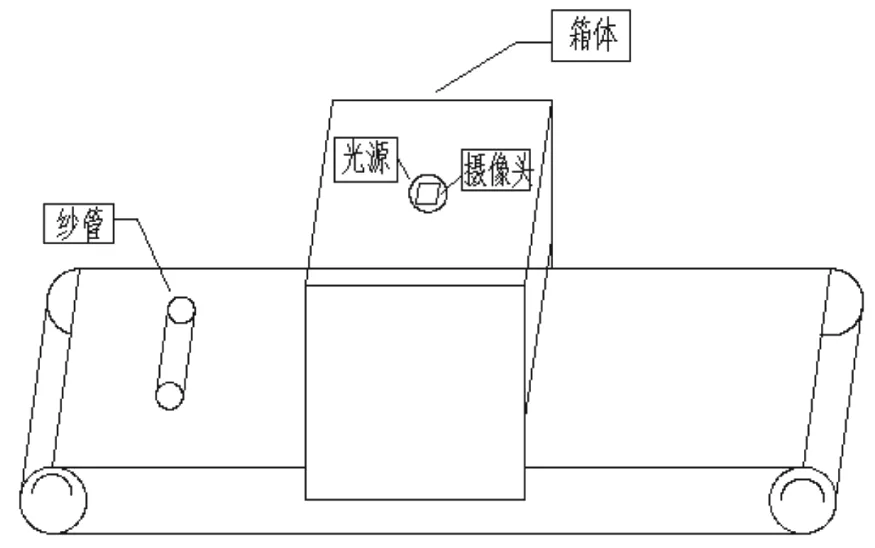
图 1 图像采集装置Fig.1 Image acquisition device.
在机器视觉测量系统中,图像采集是图像预处理的重要环节,高质量的图像可以简化预处理环节,提高程序的检测效率和精确度.图像采集设备主要包括彩色CCD摄像头、图像采集卡等.照明及采集装置如图1所示.
背景差分法主要是将拍摄过程分为背景和前景,其主要方法是利用多帧图像平均法构建背景模型,将获得的当前帧图像与构建的背景模板逐像素进行差分比较.假设构建的背景模型为Bk(x,y),当前帧图像的模型为fk+1(x,y),则当前帧图像模型与背景模型之间的变化可以用一个二值差分图像模型Dk(x,y)来表示,得
(1)
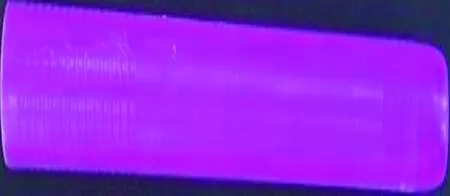
图 2 纱管区域图像Fig.2 Tube region image
式中:T为阈值,适当的设置T值可以有效区别背景像素与目标像素,经实验得T的阈值范围应在10~20之间.根据式(1),当那些与背景模型像素差值小于T的像素被标记为背景,用0表示;而大于T的像素被标记为前景目标,用1表示.
纱管区域提取是纱管智能识别的前提条件.首先通过摄像头采集纱管的数字图像,再根据背景差分法提取纱管区域.提取到的纱管区域图像如图2所示.
1.2 颜色模型转换
在机器视觉中,一幅彩色图像表示具有多种颜色模型.在以PYTHON软件为图像处理平台时,PYTHON平台中图像默认表示方式是RGB颜色模型.且在工业行业中,图像主要以RGB颜色模型表示,RGB颜色模型主要通过改变红、绿、蓝3种颜色以及它们之间的叠加关系来表示各种各样的颜色.但缺点是R,G,B这3个分量是高度相关的,即如果一个颜色的某一个分量发生了一定程度的改变,那么这个颜色很可能要发生改变.对于纱管颜色分拣而言,在图像获取过程中,颜色会发生微小变化,因此对颜色进行调节.为了避免RGB分量发生变化导致颜色结果改变,需要选择一种既能进行色偏修正,又不改变颜色的颜色模型.
相对于RGB颜色模型,HSV颜色模型能够非常直观地表达色彩的明暗、色调,以及鲜艳程度.当分别对HSV中的单通道进行色偏纠正时,能有效避免目标颜色发生变化.因此采用HSV颜色模型[12-14].假设所有的颜色值都已经归一化到范围[0,1].在RBG 3个分量中,假定最大的为MAX,最小的为MIN.则RGB模型转换到HSV模型的转换公式为
(2)
(3)
V=MAX.
(4)
1.3 纱管图像的色偏修正
在图像采集过程中,由于各种各样的原因会使图像中的(R,G,B)值产生不同程度的改变,从而导致图像颜色发生变化,使图像出现色偏现象.而色偏现象的发生可能会造成错误的颜色检测结果.为保证颜色分拣的正确率,就需要对图像进行色偏修正,从而得到真实的图像颜色,同时实现还原图像真实色彩的目的. 由于专业的图像采集设备能够保证图像的曝光和色温,因此对于图像的色偏修正主要考虑修正色调和饱和度.
1.3.1 色调(H)的修正 HSV颜色模型采用的是一个倒立的六棱锥,在H平面沿逆时针表示色相的变化,从0°到360°是可见光的全部色谱.六边形的六个角分别表示红、黄、绿、青、蓝、品红6个颜色的位置.将这6个颜色归一化到[0,255]范围后,它们对应的值分别为0/255,85,170,43,128,213.在H平面以这6个值为中心,将中心附近的其他数值按照一定的步距向这6个值靠拢,最终达到每个色调值都与它最近的中心色调相接近的结果.经过多次实验测试,步长选为[0,5]时调节效果最佳,效果如图3所示.经对比分析,原图像色调偏暗,修正后的图像色调感更强、视觉效果更加鲜艳.

(a) 原图像 (b) 修正色调后图像图 3 原图像与修正色调后图像Fig.3 Original image and image with modified tone
1.3.2 图像饱和度(S)的修正 在HSV颜色模型的六棱锥中,顶面的正六边形平面即为S平面.S的值在0到1之间变化,为了使处理方便,需要将S的值分散到[0,255]范围内,在此范围内的饱和度有256种取值,对于各种取值在目标图像中出现的概率,计算其数学期望N∈[0,255].将原图像中每一个像素的饱和度的取值范围[0,255]线性变换到[0,N]范围内,以便修正图像的饱和度,线性变换公式为

(5)
式中:S为原像素饱和度,S′为调节后的饱和度.
如果N比较大时,目标图像的饱和度过高,可降低其饱和度,得到较柔和的彩色图像,所用变换公式为
(6)
饱和度调节后的图像结果如图4所示.经对比分析,原图像在经过饱和度修正后,图像颜色更加鲜明.

(a) 原图像 (b) 修正饱和度后图像图 4 原图像与修正饱和度后图像Fig.4 Original image and image with modified saturation
通过以上2个步骤,完成了图像色调和饱和度的修正,即完成了色偏的修正.经过色偏修正后的图像显示如图5所示.经对比分析,原图像在经过色调及饱和度修正后,图像颜色更加具有真实感,更加鲜明,实现了还原图像颜色的目的.

(a) 原图像 (b) 修正色偏后图像图 5 原图像与修正色偏后图像Fig.5 Original image and image with modified color deviation
1.4 图像去噪
目标图像区域由于受到噪声、光照不均以及摄像头等电子设备精度及其他问题的影响而产生图像噪声,因此需要采用合适的滤波方法去除这些噪声.常用的滤波算法有均值滤波、高斯滤波和中值滤波及双边滤波等.
按照HSV颜色模型将彩色图像进行H,S,V分量分解,分别提取颜色平面内的灰度分量,采用合适的滤波器对灰度图像去除噪声,再将各分量通道合并为彩色图像.在HSV模型中,针对H通道、S通道、V通道分别采用均值滤波、中值滤波、高斯滤波及双边滤波进行滤波去噪处理.将滤波后的各通道的灰度图像进行合并,并将HSV模型转换为RGB模型显示,得到去噪后的效果图如图6所示.
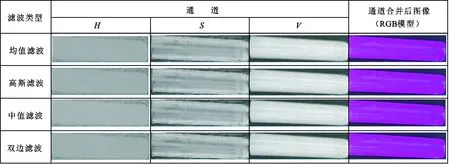
图 6 滤波图像Fig.6 Filtered image
通过图像对比分析得出,均值滤波无法较好地去除噪声,并且会产生边缘模糊的负面效应;高斯滤波虽能很好地去除噪声,但依然会将纱管轮廓模糊掉;中值滤波对高斯噪声的抑制效果不明显,对除噪声有较好的去除效果,但相比于双边滤波,轮廓依然模糊;双边滤波相比于以上3种滤波方法而言不但能很好地去除图像中的噪声,而且能够有效保持边界的清晰度.因此选择用双边滤波进行去噪处理.通过大量实验验证,采用双边滤波对其他颜色纱管进行滤波处理,能够有效去除噪声,并且在去噪的基础上可以很好地保持纱管边界.
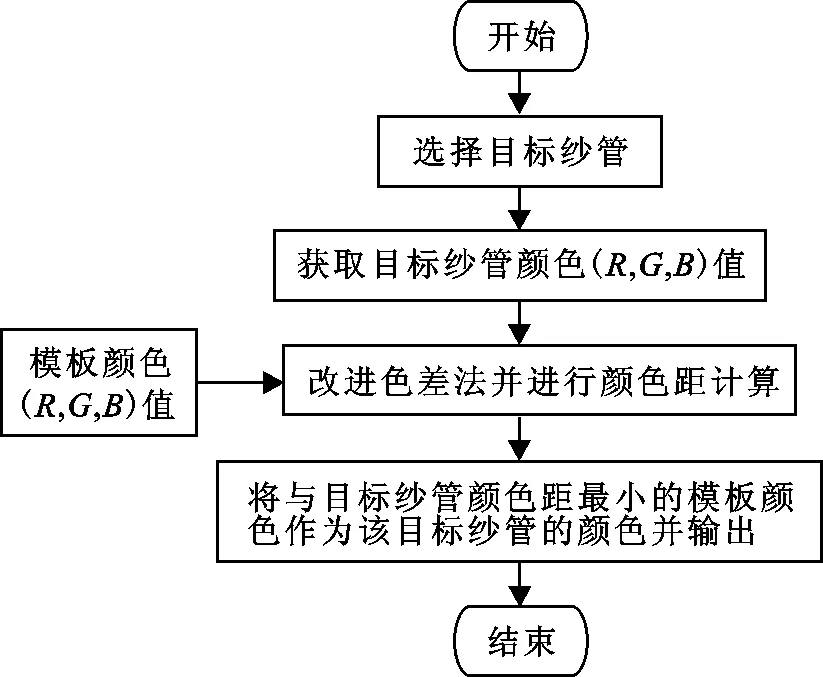
图 7 颜色检测流程图Fig.7 Flow chart of color detection
2 纱管颜色识别
在经过了前面对彩色图像的预处理操作之后,获得了无噪声影响且颜色鲜明的纱管目标图像,这时就可以开始对纱管颜色进行检测.在进行颜色分拣前,需要将颜色模型从HSV转换到RGB模型.颜色检测流程如图7所示.
2.1 改进色差法
图像的RGB颜色模型可以看成是以R,G,B为3个坐标的三维笛卡尔空间,在这个空间内,一个像素点的坐标可以表示成(r1,g1,b1),另一个像素点的坐标即为(r2,g2,b2),定义2个像素点之间的直线距离即为色差Cv,即:
(7)
颜色特征识别是把采集到的图像信号的颜色信息与事先定义的模板颜色信息进行匹配,并设定阈值,如果二者的色差在阈值范围内,则说明两种颜色匹配[15].但也会出现颜色分量不同,而色差一致现象发生.
针对纱管图像中纱管颜色比较单一的特点,将式(7)进行改进,采用颜色矩形式对单个颜色分量进行比较计算,其公式为
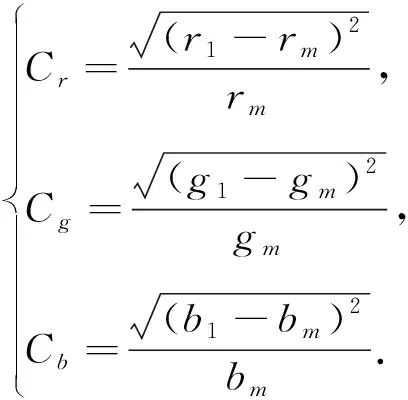
(8)
式中:r1,g1,b1分别表示待识别纱管颜色R,G,B分量值;rm,gm,bm分别表示模板图像纱管颜色R,G,B分量值;Cr,Cg,Cb分别表示待测纱管颜色R,G,B各分量值在模板图像纱管颜色R,G,B分量中的差值百分比.
首先提取纱管图像的像素大小,对纱管目标区域遍历每个像素,将每个像素点的R,G,B值作为特征量,统计各分量值的单个总量,并计算单位像素各分量的分量值,将此分量的平均值与系统中所保存的模板图像分量根据式(8)进行比较,若Cr,Cg,Cb均小于或等于阈值C,就将模板图像的颜色指定为所要识别的纱管的颜色.
2.2 颜色检测结果与分析
针对不同颜色的纱管,采用色偏纠正算法、双边滤波算法处理并经过颜色检测后得到的实验结果图像如图8所示.对比分析可知:目标图像经过色偏纠正后图像颜色更加鲜明,且采用双边滤波可以有效滤除图像中的噪声,使得纱管轮廓更加清晰,有效地保留了图像细节;在基于SVM分类器进行聚类方式实现颜色检测的过程中,参数的选择包括核函数K和损失函数E以及参数C和P的调整,而采用基于模板匹配的改进色差法,只需比较3个参数Cr,Cg,Cb,相比较而言该方法参数少,运算过程简单;在正确率方面,传统的采用欧式距离的色差检测方法中会出现(R,G,B)值不同而结果却一致的现象,而采用改进色差法分别针对(R,G,B)值采用颜色矩得到Cr,Cg,Cb,通过分析目标颜色的(R,G,B)值和模板颜色(R,G,B)值之间的色差,得出误差(Cr,Cg,Cb)可有效的控制在5%以内,且平均误差控制在2%~3%之间,有效地保证了目标识别的正确率.

图 8 部分纱管样本颜色检测结果Fig.8 Color detection results of partial yarn tube samples
3 结束语
以纱管颜色为对象提出了一种基于机器视觉的纺织纱管颜色分拣算法,通过对纺织纱管目标区域提取,采用色偏校正方法有效得到了彩色图像,并采用双边滤波法对目标图像进行滤波处理,经过改进色差法实现了纱管按照颜色进行分拣.通过实验验证,经过改进色差法得到的目标颜色与模板颜色误差控制在5%内,并且从理论上有效消除了采用欧式距离法检测颜色时出现颜色分量不同、结果却一致的现象.此算法具有计算简单,识别正确率高,可移植性强的优点,可用于不同颜色纺织纱管的分拣,对于纺织企业具有一定的应用价值.
