高海况下无人水下航行器的横摇运动分析
2018-11-08刘忠乐张志强
张 钰,刘忠乐,张志强
(海军工程大学兵器工程学院,湖北武汉430033)
0 引言
无人水下航行器(Unmanned Underwater Vehicle以下简称UUV)是一种不需要人现场操作,完全或部分自主执行水下作战、远程运载、导航定位、海洋监测等任务的水下航行器。随着UUV技术的发展,其作为一种新型的海上力量倍增器,有着越来越广泛的应用[1-2]。而UUV的回收作为其作业时的一个重要环节,直接影响UUV的工作效率。UUV的回收方式种类有很多,其中主要方式有两种,即水面回收和水下回收,在每种回收方式中又有很多不同的回收方法。在现阶段,对于UUV的回收方式主要是采用传统吊钩回收、A形架回收以及专用单臂吊回收等水面回收方式为主[3]。其共同特点为在进行回收作业时的初始阶段,UUV均需浮出水面,并在处于水面漂泊状态下完成回收。因此,这些主要的UUV回收方式在作业时都会受到海上风浪的影响。尤其是在海况较高的情况下,其影响就会更加明显。本文主要研究内容为高海况下水面无人航行器漂泊状态的研究,通过对某型UUV的横摇运动进行分析与对比,得出满足该型UUV进行正常回收的最大海况条件。
本文将运用频率响应法来分析无人水下航行器摇荡规律。这种方法的原理为将处于水面漂泊状态的UUV本体看成一个能量转换器,将海浪造成的不规则波ζ(t)视为输入信号,经过潜航器本体的转换,将波浪的能量转化为潜航器的摇荡运动的机械能,并将其作为输出信号y(t)[4]。由于在海面上漂泊的航行器非常容易发生横摇,而且横摇运动相比于其他运动的幅值最大,对UUV姿态的影响最为明显,可见横摇运动是影响UUV回收的主要因素。因此,本文对其横摇运动进行分析。在这里,我们将UUV的横摇视为线性横摇,根据线性系统,输出的横摇运动谱密度等于输入的海浪谱密度与UUV的横摇频率响应函数之积。其中海浪谱密度公式可以结合海况特点和参数,通过已知的经验公式得到,根据UUV的排水量、回转半径、初稳性高等参数得到其横摇频率响应函数,该函数只与UUV的特性有关,是UUV的固有参数,与海况条件无关。
本文将对4级海况、5级海况以及6级海况这3种高海况等级下的UUV横摇运动进行分析。
1 海况特点及海浪谱密度公式
为了更好地分析海上风浪,人们根据蒲福(Beaufort)风级表[5]将海面风速大小分为0~12共13个风级,将海况等级按照海面特征分为0~9共10级。其中4级、5级以及6级的海况等级参数见表1[4],根据这3个海况等级对应的海面征象,根据蒲福风级表(Beaufort)可以得出与之相对应的海面风级,如表2[4]所示。

表1 海况等级表Table 1 Rating scale of sea state
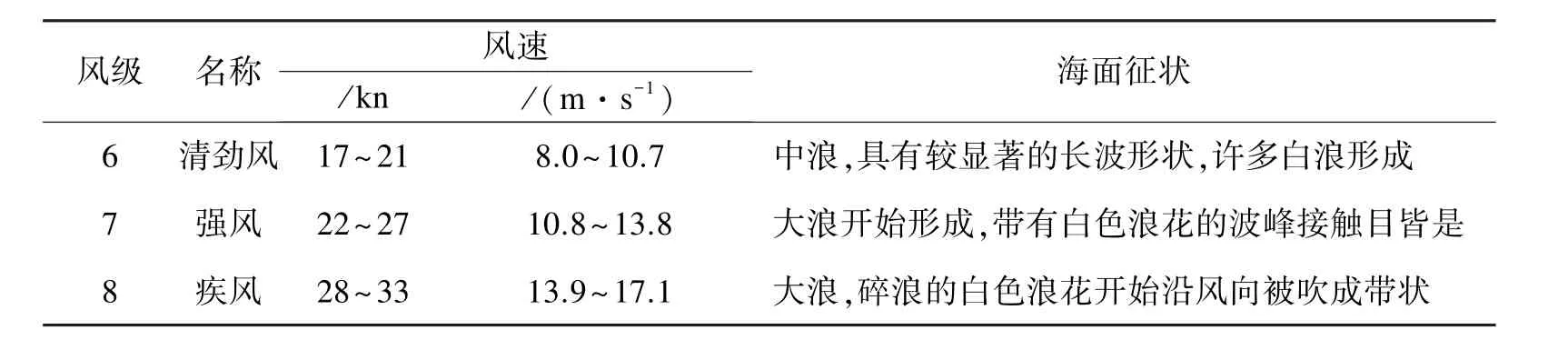
表2 蒲福风级表Table 2 Beaufort scale table
在利用频率响应法来预测UUV在不规则风浪中的横摇特性时,首先需要对UUV航行海区的风浪谱密度进行估算。由于实际测量某个海区的海浪谱是一件非常繁琐的工作,因此一些海洋领域以及船舶制造领域的专家学者根据大量的海上观测和理论工作得到了各种海浪谱的公式,其中包括P-M谱、ITTC谱、JONSWAP谱以及方向谱等[6]。由于目前采用的大多数标准波谱主要是基于P-M谱的形式建立,因此本文采用P-M谱对海浪进行分析[7]。该谱由皮尔逊和莫斯克维奇根据在北大西洋一定点上测得的大量数据分析而成,两人于1964年提出了如下的谱公式[8]:
式中:A=0.0081g2;B=0.74(g/U)4。g为重力加速度,U为离海面19.5 m处的风速。本文采用式(1)作为海浪谱密度公式。
2 横摇运动分析
2.1 横摇频率响应函数
根据动平衡原理,船舶的平衡方程可以写成[4]:
式中:I′xx为总惯性矩,即船体本身惯性矩和附加惯性矩之和;φ为绝对横摇角,即传播中线面与垂直线间形成的角度;h为初稳性高;D为船的排水量;N为横摇阻尼力矩系数。令衰减系数,横摇固有频率,则横摇运动方程为式(3):
在工程上通常使用经验公式对横摇惯性矩I′xx进行估算,其中最常用的为惯性半径估算法,见公式(4)[4]
式中K′xx为水下航行器的回转半径。
根据式(3),将有效倾波角am0作为输入,横摇角φ作为输出,即可以得到横摇频率响应函数:
经过复数运算可得:
根据式(5),其幅频特性如下:
2.2 横摇运动数学模型
设横摇运动时域函数为Sr(t),谱密度函数为Sr(ω),根据频率响应法原理可以得到输入谱密度与输出谱密度函数之间的关系:
由式(7)可推出横摇谱密度函数为
2.3 相关参数的计算和选取
下面以某型无人潜航器为例[9],已知其排水量为D=299.331 3 N,初稳性高h=0.01 m,回转半径为K′xx=1 m;罗敏莉等[10],胡志强等[11]对横摇阻尼系数做了大量研究,根据其研究结果,本文取横摇阻尼系数N=2.193 63;重力加速度取g=9.8 m/s;海面风速分别取各海况下风速的最大值,即U1=10.7 m/s,U2=13.8 m/s,U3=17.1 m/s。 将数据代入式(1)、(3)、(4)、(5)即可得到该型无人潜航器在4级,5,级,6级3种海况下的横摇谱密度函数Sr1(ω)、Sr2(ω)、Sr3(ω)。
2.4 横摇运动时域函数
为了直观地分析UUV的横摇运动特性,我们需要把横摇运动的谱密度函数转化为横摇运动的时域函数。本文假定船舶横摇角度是一个各态历经的平稳随机过程,且均值为0。由横摇谱密度得出横摇时域函数的核心为快速傅里叶变换,由于横摇谱密度函数与其离散采样点的信号频谱具有确定关系,因此,在谱密度函数上进行离散采样,即可构造出横摇运动的频谱函数,再通过对其进行傅里叶变换,即可得到横摇运动的时域函数。刘献栋等[12]给出了谱密度与离散形式的时间信号之间的关系,如式(9)所示。
式中为xt(t=0,1,…,N-1)的离散傅里叶变换。
在选取Δt时应注意满足(其中ft为最大采样频率),以避免发生频率混叠效应。由式(9)可以得到离散傅里叶变换的模值,如式(10)所示。
式中:ωk=kΔω0(ω0为参考空间频率,取ω0=0.1s-1)。由于Xk为复数,设相位角为φk,则可以得出:
式中:φk可以在[0,2π]内随机取值。 对式(11)中得到的进行补齐,可以得到。 对X进行k离散傅里叶变换即可得到UUV横摇幅度函数φ(t)/rad,再对其进行弧度与角度转换即可得到横摇幅度的角度变化规律。
2.5 基于MATLAB的横摇运动仿真
根据上述的海况条件,基于MATLAB软件对上述某型无人潜航器进行横摇运动仿真。取采样频率f=50 Hz,分别对 4级,5级和 6级海况下UUV的横摇幅度进行随机仿真,得到如下结果,如图1、图2、图3所示。其横坐标为时间t/s,纵坐标为横摇幅度的角度值φ(t)/(°)。
为了验证横摇运动仿真的准确性,本文利用由图1、图2和图3中横摇幅度时域函数求得的横摇谱密度函数与根据相关参数计算得出的横摇谱密度函数Sr1(ω)、Sr2(ω)、Sr3(ω)进行对比。 对比结果如图4、图5、图6所示。其中直线表示由已知参数求出的横摇谱密度函数,星号表示由横摇时域函数得到的横摇运动谱密度函数,可见,在三组对比图中,2种方法得到的横摇谱密度函数完全吻合,因此可以验证三组仿真具有准确性。
3 结束语
由图1、图2和图3可以看出,在4级海况下,UUV横摇的幅度在±4°之间;在5级海况下,UUV横摇的幅度在±10°之间;在6级海况下,UUV横摇幅度可以达到±40°之间。由此可见,在高海况下,海况等级对UUV横摇有着非常显著的影响。其中,海况等级越高,UUV的横摇幅度的角度值就越大,在对其进行回收作业时,相应的回收难度也就越大。由于海浪具有随机性,因此UUV的横摇幅度也具有随机性,经多次MATLAB仿真,在所分析各级海况条件下的横摇幅度均满足上述结论。已知该型UUV在安全回收时允许的最大横摇角度为±20°,由仿真数据可知,该型UUV在6级海况下的横摇不满足其安全条件,而在4级海况和5级海况下均满足其安全回收的条件。本文研究的海况条件仅作为该型UUV安全回收条件之一,具体回收方式以及其他回收条件还需根据实际情况具体分析。
