地面微地震监测采集观测系统定位精度的影响因素分析
——以大庆SZ探区为例
2018-11-07任朝发赵海波陈百军冯程斌张晟瑞
任朝发,赵海波,陈百军,冯程斌,张晟瑞
(1.大庆油田有限责任公司勘探开发研究院,黑龙江大庆163712;2.大庆油田有限责任公司采油工程研究院,黑龙江大庆163453;3.东北石油大学地球科学学院,黑龙江大庆163318)
随着非常规和低渗透油气藏的勘探开发,水力压裂技术在储层改造中起着举足轻重的作用。微地震监测技术是评价水力压裂效果和优化储层压裂成本的关键技术,已成为水力压裂过程中的标准作业[1-3]。最近十年来,凭借观测范围大、覆盖次数高、可开展震源机制研究以及不影响油田正常生产活动等优势,地面微地震监测得到了越来越广泛的应用,尤其是在压裂井附近缺少监测井的情况下,地面微地震监测往往是更好的选择[4-9]。
影响地面微地震监测定位精度的因素很多,本文重点研究观测系统的影响,其次对比分析噪声压制和速度模型校正的影响。目前,主流的地面微地震监测的事件定位算法为震源扫描叠加算法或其变形算法[10-12],其需要高密度地面监测台站保证监测的质量。因此,采集时一般采用大范围部署的地面排列(通常达到千道以上),如放射状(星型)排列[6]。而国内的地面微地震监测主要有3种观测系统,即星型排列、网格排列和稀疏排列,但未见对这些观测系统的优缺点进行对比分析的文献[13-15]。在大庆探区试验的地面微地震监测,3种观测系统的采集方式都有采用,出于成本和施工效率等因素考虑,接收道数较少(通常为几十道),噪声压制手段单一,速度模型准确度粗糙,影响了定位精度和可靠性[16]。特殊情况下,资料中多数微地震信号可识别时,采用几十个接收道数的地面监测可将微地震事件成像并得到较可靠的定位结果[17]。但是,由于大庆探区受较厚的第四纪疏松表层影响,地面监测资料信噪比低、可识别的微地震信号极少,定位结果精度偏低。虽然压裂监测裂缝走向与主应力方向基本吻合,但压裂裂缝形态的解释可信度较低,因此有必要进行地面微地震监测采集观测系统、噪声压制和速度模型校正等方面的论证分析,为水力压裂地面微地震监测提供排列布设方案和资料处理流程指导。
CHAMBERS等[18]开展了利用地面观测方式探测微弱信号的可探测性研究,在固定检波器排列方式和个数条件下(800个接收道的八臂星型排列),分析不同信噪比时震源定位能力,表明地面监测能成功地对原始数据中信号太弱以致不可见的微震事件进行定位成像。与其研究不同的是,本文依据目前大庆探区试验的星型排列、网格排列和稀疏排列3种观测方式,结合实际施工井的水平井轨迹、射孔位置、地面监测噪声和实际的测井速度等资料,通过正演研究,论证3种观测方式在不同噪声水平下对微震事件的定位能力与精度;并对比分析星型观测系统在不同接收道数、相同接收道数不同接收孔径(道间距)下的震源定位精度。另外,针对大庆探区地面微地震监测中存在不需要采集校验信号的观点以及噪声压制手段单一的问题,为了明确校验炮在速度模型优化中的作用,以及噪声压制技术在微地震监测中的必要性,文中分析了速度模型和噪声压制对震源定位精度的影响。
1 正演模型及方法
本次正演研究设计参数包括速度模型、背景噪声文件、已知震源点深度和坐标等,均来自大庆SZ探区的一口水平井的实际地面微地震压裂监测项目。此监测目的是为了开展水平井大规模套管多段、多簇体积压裂的储层改造效果评价,为确定合理缝间距,优化压裂设计提供依据。此井压裂水平段测深为2025~2895m,垂直深度为1789.7~1794.2m,分11段23个射孔点。地面监测采用六臂星型阵列,66道接收,检波器地表埋深0.5~1.0m,监测半径最远为770m。
图1显示的是大庆实验的地面微地震监测中的一个清晰可见的微地震事件信号,其中图1a和图1b分别为原始微地震信号及其频谱,图1c和图1d分别为带通滤波后的微地震信号及其频谱。根据其频谱分析,有效微地震信号主频在40Hz左右,故正演时采用40Hz雷克子波。首先根据实际的经过射孔信号校正的三维速度模型建立水平层状正演模型,用23个射孔点作为震源点。其次在不考虑震源机制的影响下,采用40Hz雷克子波激发P波,波场采样率为1ms。利用简化高斯束射线追踪方法进行地震波场传播路径追踪,生成宽角激发、接收条件下的微地震正演记录[19-21]。在正演微地震数据中加入实际监测的地面噪声生成含有不同比例噪声的合成记录。实际监测的噪声数据如图2所示,其成分主要是低频噪声、高频噪声和异常振幅等。在整个研究过程中采用带通滤波、随机噪声压制与异常振幅压制方法压制合成记录中的噪声[22-23]。噪声压制中的关键参数主要为:带通滤波频带为20~60Hz;异常振幅压制中参与计算的道数为6道,门槛值为1.8;随机噪声压制中Hankel矩阵阶数为3。对比研究中相同处理环节所采用的参数保持一致,在保证不损害有效信号的同时最大限度地提高资料信噪比。最后采用扫描叠加算法进行震源定位[24],分析空间定位精度。扫描叠加定位的思路为:将监测的3D压裂空间区域进行网格剖分,并假设每一网格节点对应一个虚拟震源。利用射线追踪方法,计算出所有虚拟震源到观测系统的走时,再根据走时对微地震数据进行正常时差校正,然后进行振幅包络叠加,叠加振幅(能量)最大的网格点便为震源位置。文中网格剖分步长为5m×5m×5m,信噪比门槛值为3.0。
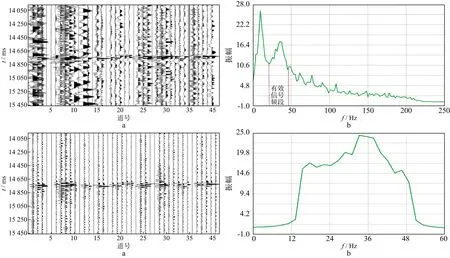
图1 大庆SZ探区实际地面监测的微地震信号及其频率成分a 原始微地震信号;b 原始微地震信号频谱;c 带通滤波后微地震信号;d 带通滤波后微地震信号的频谱
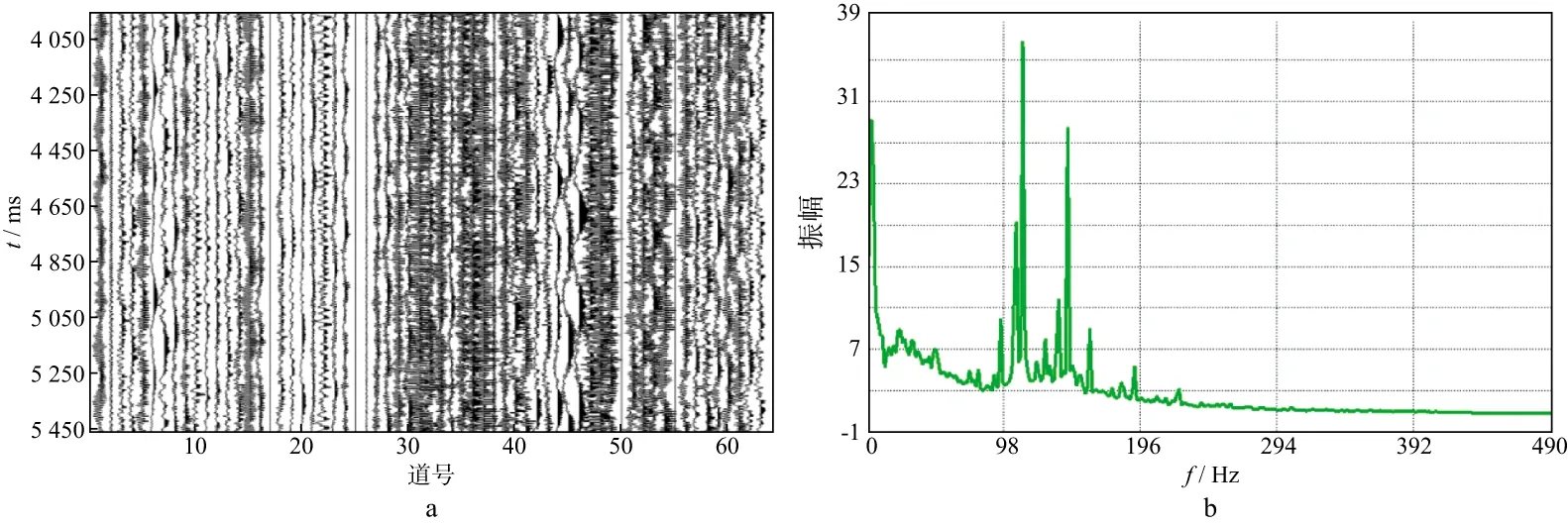
图2 大庆SZ探区实际地面监测的微地震噪声信号(a)及其频率成分(b)
2 地面观测系统对比分析
2.1 3种观测系统定位精度对比
图3展示了设计的3种观测系统以及对应的正演数据。图中的平行四边形是设计的压裂区域,字母A,B,C和D是其4个顶点,其短边与正北方向成45°夹角,代表最大主应力方向,23个已知射孔点(震源点)位于平行四边行中部的水平井轨迹上。3种观测系统具有相同的波场接收孔径,如图中的绿色线表示的范围。图3a为106道星型观测系统,图3c为110道网格观测系统,图3e为106道稀疏排列观测系统。本文探讨的稀疏排列是指除星型排列、规则网格排列外的排列方式,研究时采用接收孔径内的随机排列为代表。图3中的正演微地震记录是由(70.17m,1215.54m,1794.22m)的震源产生,星型排列与网格排列中信号的时距特征清晰,可连续追踪性强。当3种观测系统的合成记录中噪声比例为50%时,合成记录中均有肉眼可识别的微地震事件信号。而当噪声为70%时,合成记录在去噪前无肉眼可识别微地震事件信号,在去噪后则可识别,如图4。在实际地面微地震监测中,微地震事件信号的接收时间未知,稀疏排列观测系统不利于信号的连续追踪和监测资料处理定位中的质量控制。当噪声为85%时,去噪前后均无可识别微地震事件信号,以星型观测系统合成记录为例(图5)。研究证明当数据中的微地震事件信号肉眼可见时,3种观测系统都能准确检测并定位微地震事件,因此为分析3种观测系统的定位精度,用含85%噪声的合成记录做对比研究。3种观测系统合成记录采用相同的处理流程和参数,定位结果和相应的误差分析如图6所示,此处的误差是定位事件点与已知点的空间距离。图6a是3种观测系统定位结果与实际射孔点的空间相互位置关系,图6b是定位结果的误差分析统计图。当噪声水平达到85%时,稀疏排列观测系统只能定位20个事件点,并且误差整体都比较大,而星型和网格型观测系统能实现23个事件点的全部定位,误差相对较小。网格型观测系统的定位误差虽然在部分点小于星型,但在处于井轨迹远端的定位结果偏离实际射孔点较远,如图6b 中事件点(震源点)1,误差显著大于星型观测系统的定位结果。由此可见,星型观测系统的定位结果略优于网格型,前者的平均误差为25.51m,而后者的平均误差为28.13m。在实际地面微地监测中,井口压裂设备产生的噪声是最主要的噪声,星型观测系统以井口为中心向外辐射多条测线能最大化检波器的偏移距,远离主要的噪声源和压制线性噪声[25]。其次,地面监测类似常规地震,需开展踏勘、清理和布设等工作,综合上述因素,在实际的地面微地震监测中,星型观测系统更具有适用性和灵活性。
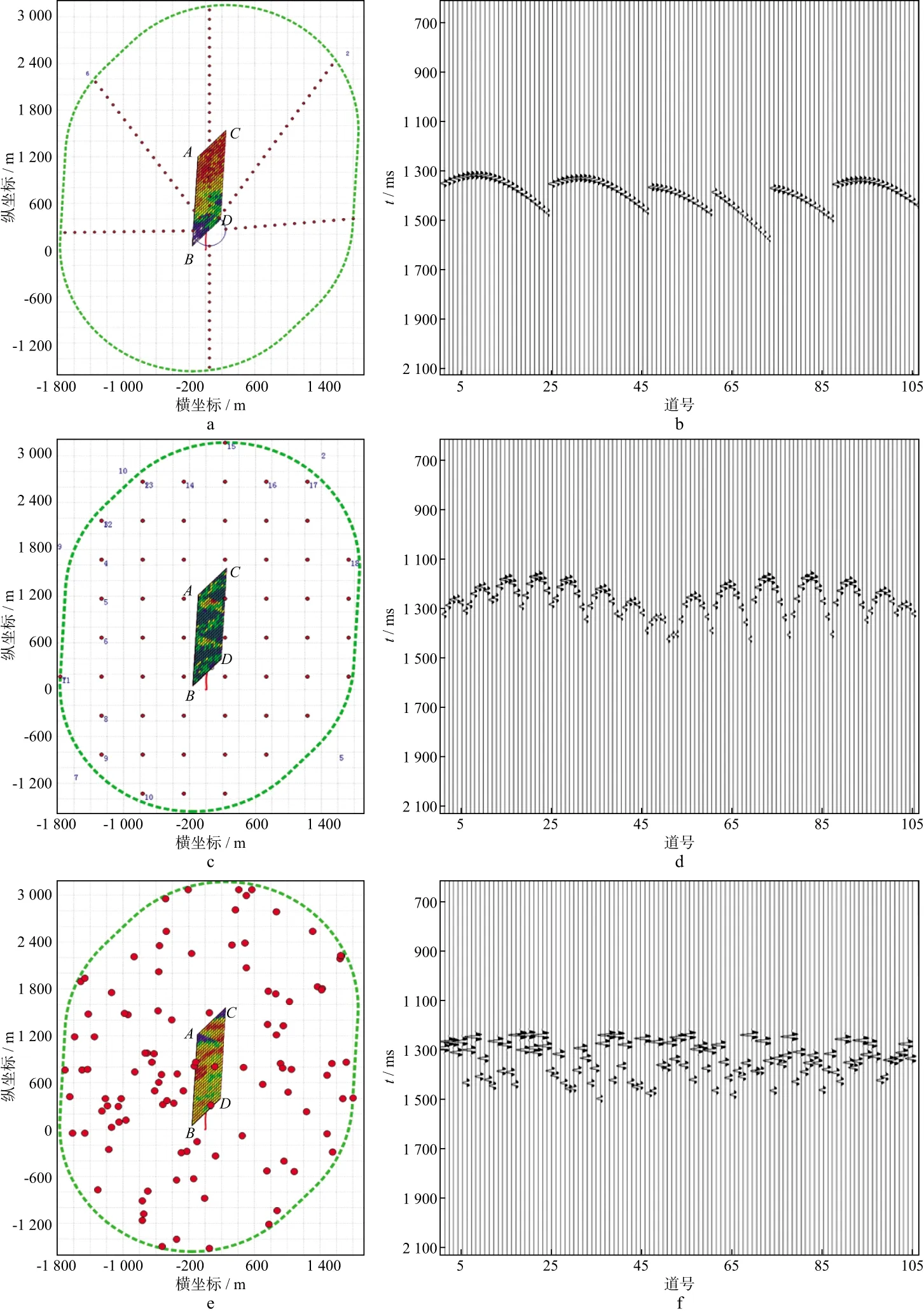
图3 3种观测系统示意图与相应的正演数据a 星型排列;b 星型排列的正演数据;c 网格排列;d 网格排列的正演数据;e 稀疏排列;f 稀疏排列的正演数据

图4 3种观测系统70%噪声数据去噪前、后效果对比a 星型排列去噪前数据;b 星型排列去噪后数据;c 网格排列去噪前数据;d 网格排列去噪后数据;e 稀疏排列去噪前数据;f 稀疏排列去噪后数据
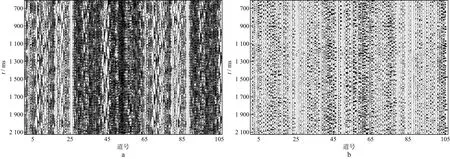
图5 星型排列观测系统记录含85%噪声数据去噪前(a)、后(b)结果对比
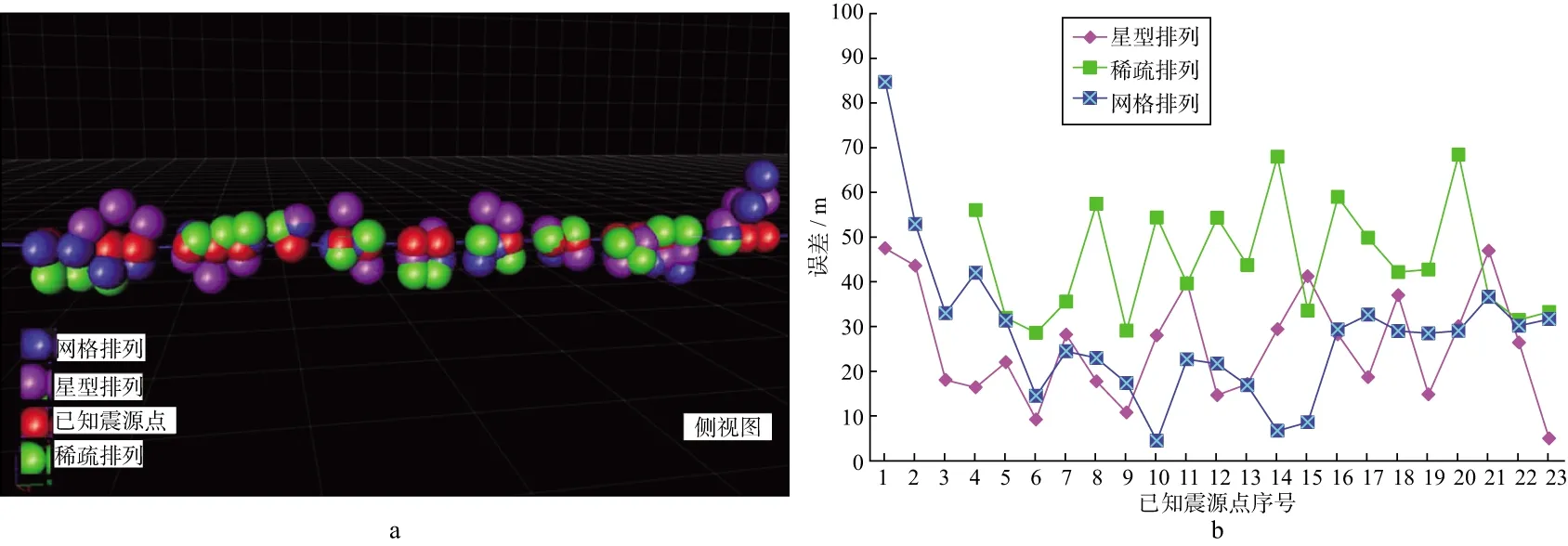
图6 3种观测系统定位结果(a)与误差分析(b)
2.2 星型排列接收道数对比
研究用的模型和流程与上述观测系统类型对比研究的相同。接收道数分别用了实际监测的66道,设计的106道和211道,3种道数的星型观测系统具有相同的波场接收孔径。3种接收道数的正演微地震记录分别与实际噪声合成测试数据,其中的噪声比例分别为30%,50%,70%,85%,90%。如图7所示,当合成记录中噪声比例从30%增加到70%时,已知的23个震源点都能被检测和定位。当噪声比例继续增加时,66道接收的观测系统对微地震事件的检测定位能力急剧下降,当噪声到达90%时,基本失去对微地震事件的检测定位能力,而106道和211道的观测系统在此噪声水平下还能检测定位部分微地震事件。图8是当噪声到达85%时,211道接收和106道接收对微地震事件定位误差的比较。在这种噪声水平下,虽然2种类型都能完全检测和定位23个已知震源点,但是106道的定位误差明显比211道的大。106道的平均误差为25.51m,211道的平均误差为16.91m。研究表明随着接收道数的减少和噪声水平的增大,可检测定位的微地震事件和定位精度随之下降,这表明星型观测系统接收道数越多,其抗噪能力越强。但106道的定位精度误差仍可接受,可用于压裂裂缝成像分布的压裂监测。

图7 3种接收道数对微地震事件的检测定位能力
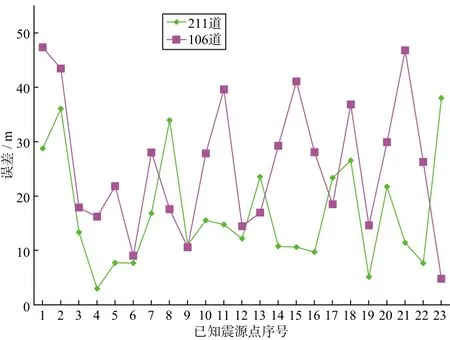
图8 星型排列观测系统106道接收和211道接收在85%噪声水平下的定位误差比较
2.3 星型排列接收孔径对比
为了对比不同接收孔径观测系统对微地震事件的检测与定位能力,设计如图9所示的星型观测系统。110道,道间距为120m,减小接收孔径后,道间距为70m。2种观测系统的合成记录中噪声比例均为85%,后续的处理和定位流程同前。两种情况下均能实现23个已知点定位,其中大孔径的平均定位误差为25.51m,小孔径的平均定位误差为30.39m(图10)。所以星型观测系统在道数一定的情况下,大孔径对微地震事件的定位能力与精度优于小孔径。
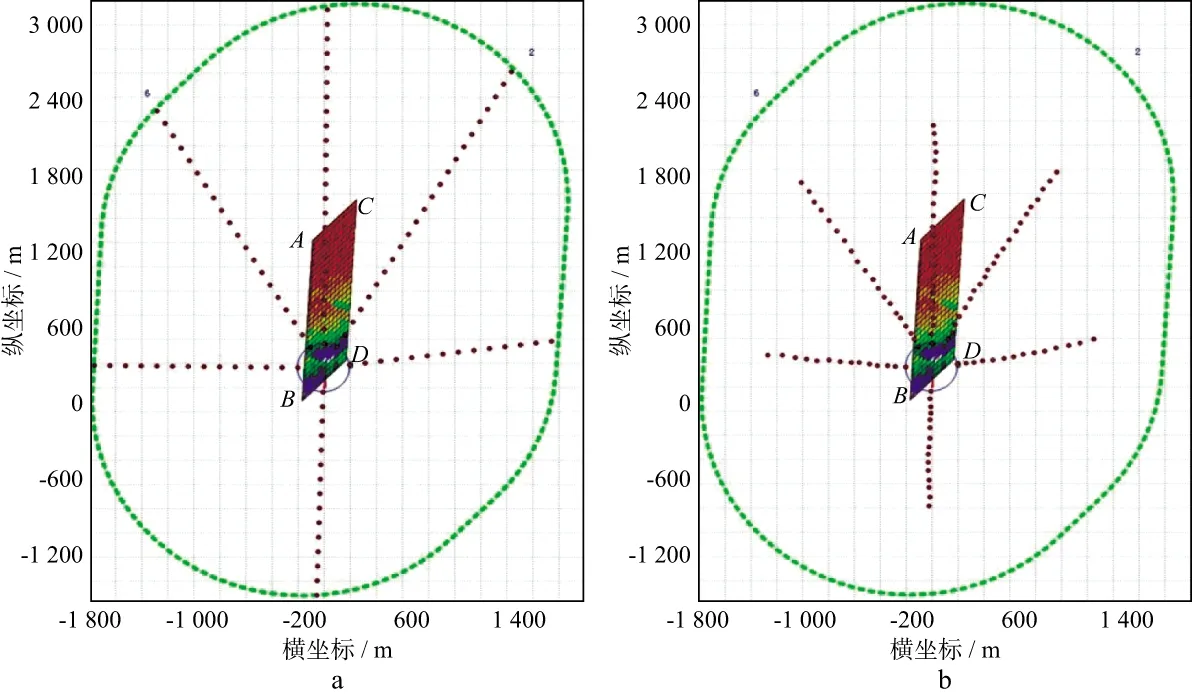
图9 星型排列观测系统110道不同接收孔径观测系统a 120m道间距星型观测系统;b 70m道间距星型观测系统
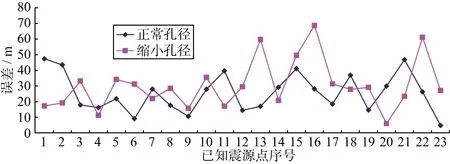
图10 星型110道不同接收孔径定位误差
2.4 噪声压制对微地震定位精度的影响
为了分析地面微地震监测时噪声压制对微地震事件检测及定位精度的影响,利用2.1节中星型106道观测系统的合成记录,采用相同的参数与处理流程,对比去噪前、后的定位效果。当合成记录中噪声比例为50%时,合成记录剖面上的微地震事件信号在在去噪前就可识别(图11a),去噪后可识别的微地震事件信号更清晰(图11b)。前面观测系统对比研究中,已证明当微地震事件信号可见时,就能被准确检测并定位。图12对比了合成记录含50%噪声时去噪前后的微地震事件定位效果与误差。从图中可以看出,合成记录去噪后的定位效果好于去噪前,去噪后定位结果误差显著减小,其平均误差为5.54m,去噪前定位结果的平均误差为11.07m。当合成记录中噪声到达70%时,记录中无肉眼可识别微地震事件信号,合成记录不去噪很难定位微地震事件,而去噪后能准确定位微地震事件。所以,在地面微地震监测中,噪声压制非常关键,直接影响到微地震监测的效果。
2.5 速度对定位精度的影响
地面微地震监测中速度模型对定位精度具有非常大的影响。生产中的校验炮信号(一般为射孔或导爆索)是速度模型校正的重要先验信息,因其是在已知位置进行强能量激发产生并由地面微地震资料采集系统接收到的地震信号[26]。为对比速度模型对微地震事件定位精度的影响,研究时同样采用星型106道观测系统含有70%噪声合成记录。分别将速度模型的速度增大10%和减小10%,然后再用改变后的速度模型,采用与前面研究相同的流程和参数,对去噪后的合成记录进行微地震事件定位。如图13所示,当速度模型的速度增大或减小时,其定位结果与正常速度模型定位结果相差很大。尤其是当速度模型的速度减小10%后,其定位的微地震事件点比实际的射孔点个数多。将定位的微地震事件点逐一返回波形记录数据上,删除与正演记录时间不符合的错误定位结果,然后计算定位正确事件点的定位误差。其结果表明,不管速度模型准确与否,微地震事件定位结果在平面上的误差相差不大(图13c,图13d),然而在纵向上即深度误差相当大(图13b)。所以,当速度模型存在一定误差的时候,定位结果会受到不同程度的影响,不准确的速度模型对定位结果的深度影响很大。因此利用校验炮信号进行速度模型优化处理至关重要。目前在大庆探区试验的地面微地震监测,有的地面监测没有采集校验炮信号用于速度模型校正,建议在以后的地面微地震监测中必须采集校验炮信号数据,以用于速度模型校正,提高监测结果的可信度。
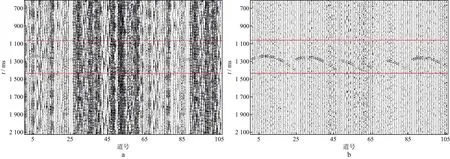
图11 星型排列观测系统106道含50%噪声合成记录去噪前(a)、后(b)效果对比
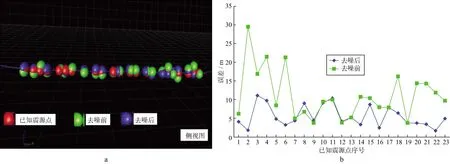
图12 星型排列观测系统106道含50%噪声合成记录去噪前、后定位效果(a)与误差(b)对比
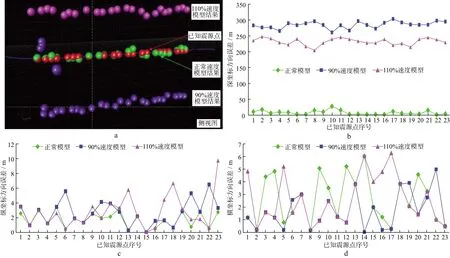
图13 3种速度模型的定位结果与误差对比a 定位侧视效果;b 定位结果的深度误差;c 定位结果的北方向误差;d 定位结果的东方向误差
3 结论及认识
基于实际水平井的压裂地面微地震资料和正演数据分析,主要结论如下:
1) 星型观测系统在微地震事件的检测定位能力和定位误差方面略优于网格型观测系统,稀疏排列观测系统效果最差;
2) 地面微地震观测系统的定位能力受资料信噪比的影响大,在成本允许时应尽量增加接收道数,以有利于后续震源定位时提高信噪比,增强微地震事件的定位能力;当采用星型观测系统时,在道数一定的情况下,应该在接收孔径内采用大道间距排列;
3) 相干扫描类震源定位方法适用于信噪比低,事件初至拾取困难的地面微地震监测,合理保护弱信号的噪声压制处理技术可提高地面微地震监测的震源定位能力和精度;
4) 准确的速度模型是地面微地震监测成功的关键,有必要采集校验炮信号数据优化速度模型。
在实际地面微地震监测工作中,合理的做法是根据监测目的和成本,在压裂施工开始前做好噪声调查及采集观测系统研究。分析认为,至少百道以上的星型排列观测方式可用于大庆探区地表条件和压裂的微地震监测。
