基于LBP和HOG决策融合的高速列车受电弓检测
2018-11-06余志斌
别 致,余志斌
基于LBP和HOG决策融合的高速列车受电弓检测
别 致,余志斌
针对受电弓滑板检测装置图像拍摄中受电弓的检测问题,提出一种基于LBP和HOG特征分类信息决策融合的受电弓检测方法。通过测试,相比采用单一分类器进行检测,该方法对受电弓区域的检测具有更低的漏检率和误检率,检测效果好,具有较高的应用价值。
局部二值模式(LBP);方向梯度直方图(HOG);决策融合;受电弓;支持向量机(SVM)
0 引言
随着我国高速铁路的快速发展,列车运行的安全问题日益受到社会各界的重视与关注。列车运行需要通过弓网系统传输和获取电能,而在弓网系统中,受电弓从接触网获得电能,其一旦发生故障,将造成列车断电停驶[1]。因此需定期对受电弓进行监测检测,以便及时发现并排除故障,保证列车的正常运行。
目前对受电弓的检测主要有4种方式:人工检测、接触式检测、非接触式测距技术检测和非接触式图像处理技术检测[2]。随着计算机和图像处理技术的快速发展,非接触式图像检测凭借成本低、智能程度高、设备灵活等诸多优势逐渐成为了铁路安全巡检技术研究的热点。文献[3]利用“HOG(Histogram of Oriented Gradient)特征与广义霍夫曼变换相结合”的方法提取受电弓滑板拐角区域特征检测受电弓,但该特征抗干扰能力较弱;文献[4]提出“基于Paralleled-Gabor变换的动车组车顶图像受电弓检测”方法,该方法的检测结果受图像倾斜角度的影响较大,需预先进行倾斜校正处理。
本文以受电弓滑板检测装置采集的高速列车车顶图像为研究对象,利用图像处理技术对数据集进行实验分析。因列车车顶图像横向直线干扰过多,易造成误检和漏检,故对受电弓区域分别提取其局部二值模式LBP(Local Binary Paffern)纹理特征和HOG局部特征,采用SVM(支持向量机)对2类特征进行训练分类,并采用决策融合的方法,获得融合后的分类结果,从而实现对受电弓的精确检测。
1 受电弓区域检测流程
1.1 受电弓图像数据
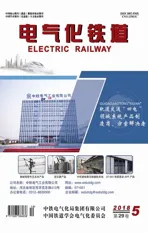
以安装在固定位置的相机采集的高速列车车顶图片为研究对象(图1),选取1 000张受电弓区域图像为正样本,3 000张随机背景为负样本。
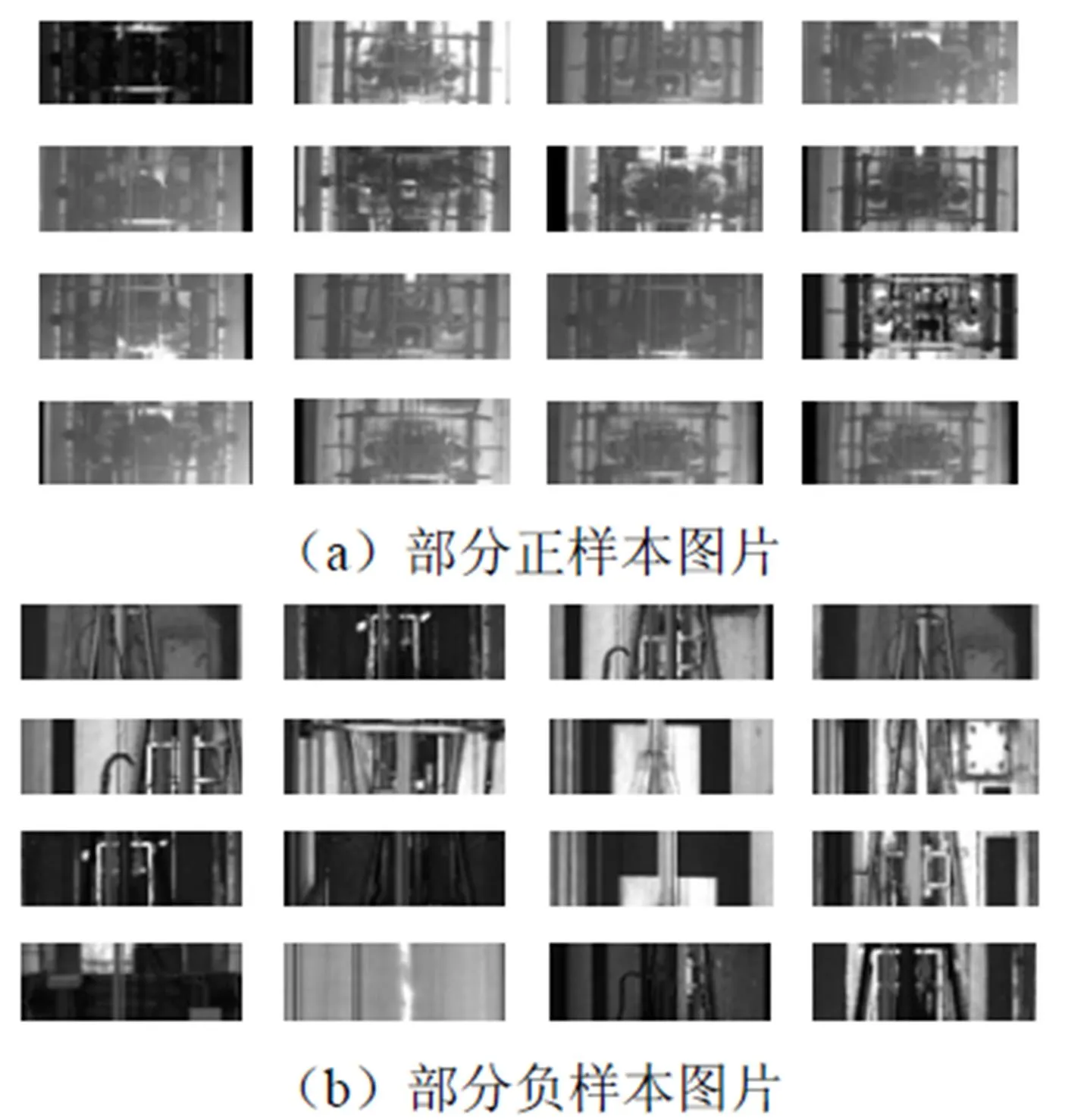
图1 实验样本图像示例
1.2 受电弓检测过程
受电弓的检测流程如图2所示,其步骤如下。
步骤1:图像预处理,使用MSRCR算法对列车车顶图像进行增强;
步骤2:2类特征提取,分别对样本图像提取LBP和HOG特征,获得特征向量用以表征图像;
步骤3:特征学习和分类,用2个支持向量机分别对2组不同的特征向量进行分类;
步骤4:信息决策融合,使用基于LOP的决策融合方法对2个分类器的输出进行决策及融合,得到最终的分类结果。

图2 检测流程图
2 基于决策融合的受电弓检测
2.1 基于MSRCR的车顶图像预处理
受拍摄光线的影响,拍摄图像可能存在曝光过度或曝光不足的问题。为了保证后续受电弓检测的准确性,需首先进行图像增强等预处理,增强对受电弓区域的辨识能力,提高图像的质量。本文采用带色彩恢复的多尺度视网膜增强算法MSRCR(Multi- Scale Retinex with Color Restoration)对车顶图像进行预处理。MSRCR是基于Retinex理论提出的算法。Retinex理论基本内容是:人眼感知物体的亮度主要是由物体对光线的反射能力决定,而不是由反射光强度的绝对值决定[5,6]。如图3所示,观察者所看到的物体的图像是由物体表面对入射光的反射得到,反射率由物体本身决定,不受入射光影响。

图3 Retinex原理示意图
人眼或摄像机接收到的图像信号数学表达式为
(,) =(,) ·(,) (1)
式中,(,)表示环境光的照射分量;(,)表示物体的反射分量。
对式(1)两边取对数,可以得到
Log[(,)] = log[(,)]-log[(,)] (2)
由式(2)可知,只需要估计(,)就可以通过数据运算得到增强后的图像(,)。经过实验研究,在MSRCR参数尺度数选取为2,尺度最大值取550的情况下,图像增强的效果最好,算法所需时间最短。图4为通过MSRCR对图像进行增强的前后对比效果图。
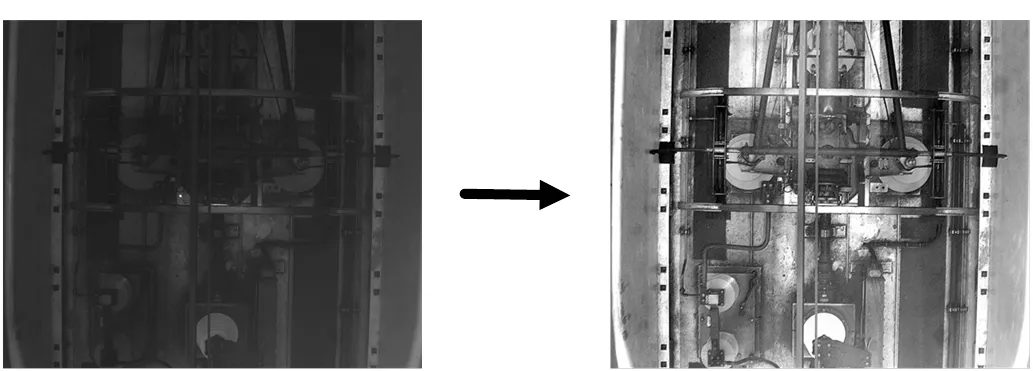
图4 增强前后对比
经过MSRCR图像增强后,增强了图像的对比度和清晰度,能较好地突出受电弓的细节,以便于后续受电弓的检测。
2.2 受电弓图像特征提取
2.2.1 LBP纹理特征提取
局部二值模式LBP[7]是由T.Ojala,M.Pietikainen,D.Harwood等人于1994年提出的用于描述图像纹理特征的算子。LBP特征被广泛应用于纹理检测、图像检测、人脸识别等领域,具有旋转不变性和灰度不变性等显著优点。其基本思想为:以一个3×3的窗口为例,以窗口中心像素的灰度值为阈值,将周围相邻的8个像素值与之比较,如果周围像素值小于中心像素的灰度值,则该像素位置被标记为0,否则将其标记为1,每个像素就可得到一个二进制的组合,因为每个像素周围有8个相邻的像素点,故有28种组合。

式中,(c,c)表示中心像素;c表示中心像素的亮度;i表示相邻像素的亮度;为符号函数,其表达式为

基本的LBP算子如图5所示。基本的LBP特征只覆盖固定尺寸的小区域,不能满足不同尺度的需求,针对该缺陷,文献[7,8]对LBP进行了改进,改进后的LBP采用不同尺寸大小的圆形领域代替方形领域,采用双线性插值法计算未落在像素位置上的点,具有灰度不变性和旋转不变性等特点。

图5 LBP原理图
本文对实验图像采用LBP纹理特征进行特征提取时,参数设置为:半径= 3,点数= 8,将图像划分为10×10的均匀区域,对每个区域求取LBP直方图,最终构成25 600维的LBP纹理特征。对受电弓区域提取的LBP纹理特征见图6。
图6 LBP纹理特征
2.2.2 HOG局部特征提取
HOG局部特征提取[9]是2005年CVPR会议上,由法国国家计算机科学及自动控制研究所的Datal等人提出的一种解决人体目标检测的图像描述算子,通过计算统计图像局部区域中的方向梯度直方图来构成特征。
首先利用梯度算子计算出每个像素点的梯度方向和幅值:
式中,x(,)、y(,)代表像素点(,)处的水平方向梯度、垂直方向梯度;(,)代表像素点(,)处的幅值;(,)代表梯度的方向。
将图像分成若干个小区域(称为cell),每个cell的梯度方向分为9个扇区,每个像素点根据其梯度方向,将其幅值累加到直方图中;而后将几个cell组合成为一个大的连接区域block,于是每个cell的直方图可合并为一个大的直方图[10];最后对这些block实现块描述子归一化,归一化因子计算式为

最终将block的直方图串联获得HOG描述算子。本文在样本图像HOG特征提取时选取的参数如下:cell大小为8×8,block大小为16×16,最终构成62 208维的特征向量。对受电弓区域的HOG特征所做的可视化处理如图7所示。
2.3 受电弓图像特征学习和分类
支持向量机(SVM)[10,11]是由Cortes和Vapnik等人于1995年提出的一种监督式学习方法,被广泛应用于统计分类和回归分析领域。该算法的主要思想是将低维空间中的样本点映射到一个高维空间内,在该空间内建立一个最大间隔超平面,使样本点线性可分。分类原理如图8所示。
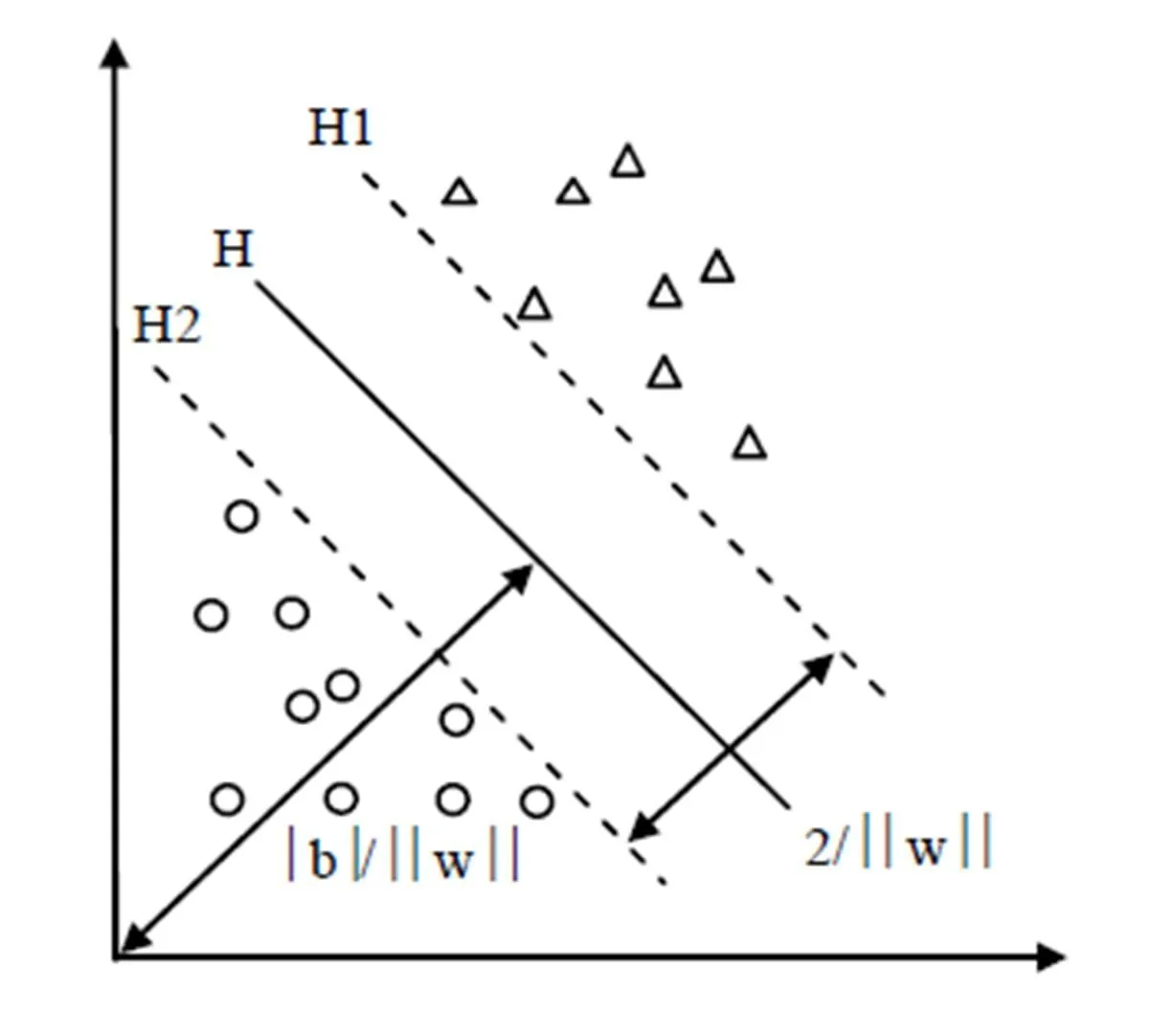
图8 SVM分类原理
假设给定一个训练样本:{(x,y)½= 1,2, …,,xÎR,Î[-1,1]},表示空间维数,分类超平面方程为(·) += 0,将其进行归一化,使得2个类别的训练样本满足
y[(·) +]-1≥0 (8)
满足式(8)且使‖‖2最小的分类面即为最优分类面。
将之前提取的LBP特征和HOG特征数据分别通过支持向量机进行训练,得到2个分类器。
2.4 基于线性意见池的决策融合方法
对2个分类器的输出采用线性意见池(Linear Opinion Pool,LOP)[12]决策融合方法进行决策及融合。在融合过程中,利用每个分类器的后验概率p(w½)对各个弱分类器赋予不同的权重,根据概率最大原则估计最终决策函数,得出最终的分类结果。具体方式如下:
= argmax(w½),Î{1, 2, …,} (10)
式中,表示分类器个数;表示类的标签;表示类的个数;表示分类器的权重;(w½)为每个分类器对每类的后验概率加权求和后每类的加权分类后验概率。
最后选择具有最大加权后验概率的模式作为分类结果。
SVM分类器的后验概率p(w½)的计算基于Bayes准则[13],用(= 1½)代替类别条件密度,采用Sigmoid的参数化形式表达:
该方法相当于创建新的训练集,基于新的数据进行训练,训练模型的输出即为分类器的输出。
3 受电弓图像检测实验与分析
实验环境为酷睿i7处理器,主频2.5 GHz,内存8 G,Windows10系统,编程环境为Visual Studio 2010。为了验证本文所述方法的有效性,设计了以下3种实验进行对比。
实验一:使用HOG+SVM的方法进行实验。
实验二:使用LBP+SVM的方法进行实验。
实验三:使用本文所述方法进行实验。
对5 000张图像进行检测,识别效果如图9所示,实验结果如表1所示。
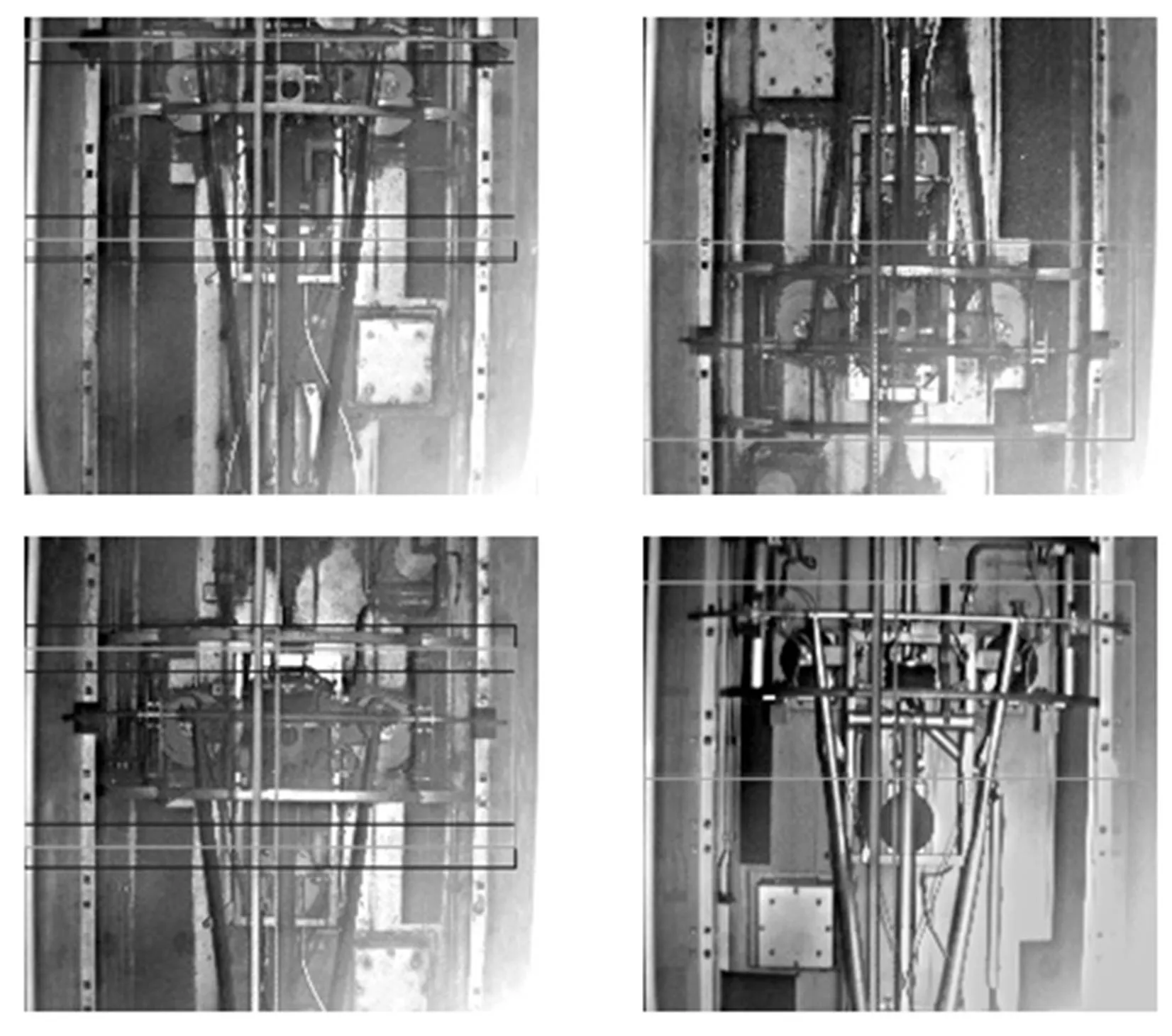
图9 受电弓检测结果示意图
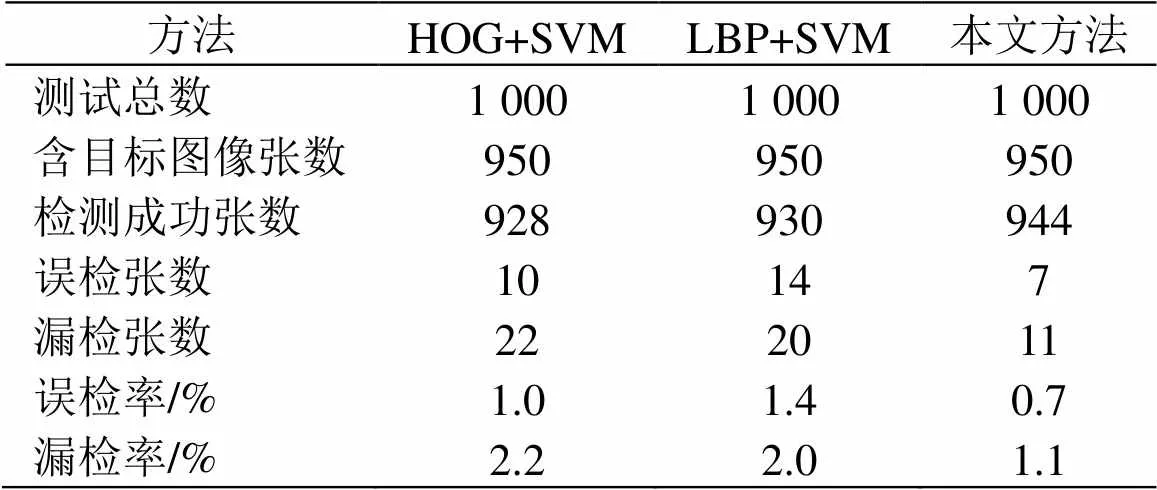
表1 不同实验方法的受电弓检测结果
表中检测成功是指识别到图像中含有受电弓的图像;误检是指检测到的图像不含受电弓;漏检是指图像中含有受电弓但是未能检测到;误检率为误检张数与测试总数之比;漏检率为漏检张数与测试总数之比。
通过上述实验可以看出,用HOG特征训练单一SVM分类器检测的方法误检率为1.0%,用LBP特征训练单一SVM分类器检测的方法误检率为1.4%,而本文所述方法误检率为0.7%,相较于前2种方法有所降低。对比HOG和LBP单独训练分类器检测,本文所述方法的漏检率也比前2种方法低。因此本文所述方法能够较好地实现对受电弓的特征提取和分类。
在未检测成功的图像中,除去本身不含受电弓的图片,有部分图片因所包含受电弓区域较少,特征不明显,因此未能正确检测,该部分即表1中的漏检部分。对于部分误检图片则是包含部分滑板区域,滑板区域不完整,但被检测为含有受电弓,对后续的滑板故障检测不利,因此判断为误检。
在实际工程应用中,进行检测时可以将误检的样本加入分类器训练的负样本中,训练出新的分类器。随着分类器的更新与完善,系统的误检率会随之降低。
4 结语
结合图像处理技术,本文提出了基于LBP和HOG特征的分类决策融合方法,并进行受电弓特征提取和分类决策的融合实验。实验结果表明,基于决策融合的受电弓检测方法对比使用单一分类器进行检测,漏检率和误检率均有所下降;对过曝或过暗含有较多干扰的受电弓图像,能够进行精确检测,识别效果较好。使用该方法对受电弓进行检测具有较高的工程应用价值,为受电弓区域故障精确检测奠定了基础。此外,该方法也可为接触网其他部位的检测提供参考,例如接触网支柱检测等,具有广阔的应用前景。
[1] 陈刚,林杰.动车组受电弓故障分析及改进[J].中国铁路,2013(5):94-96.
[2] 韩志伟,刘志刚,张桂南,等. 非接触式弓网图像检测技术研究综述[J]. 铁道学报,2013,35(6):40-47.
[3] 白瑞敏. 基于图像处理的接触网吊弦和受电弓滑板的检测与识别[D]. 西南交通大学,2017.
[4] 韦璞. 面向监控视频的受电弓与接触网支柱检测[D]. 西南交通大学,2017.
[5] 汪林林,余梅,安超. 模糊多尺度Retinex彩色图像增强[J]. 计算机工程与应用,2012,48(7):174-176.
[6] 占必超,吴一全,纪守新. 基于平稳小波变换和Retinex的红外图像增强方法[J]. 光学学报,2010,30(10):2788-2793.
[7] T. Ojala, M. Pietikainen, and D. Harwood, “A comparative study of texturemeasures with classification based on feature distributeons,” PatternRecognition, 1996, vol. 19, no. 3, pp. 51- 59.
[8] Suruliandi A, Meena K, Rose R R. Local binary pattern and its derivatives for face recognition[J]. Iet Computer Vision, 2012, 6(5):480-488.
[9] 李星,郭晓松,郭君斌. 基于HOG特征和SVM的前向车辆识别方法[J]. 计算机科学,2013,40(s2):329-332.
[10] 段旺旺,唐鹏,金炜东,等. 基于关键区域HOG特征的铁路接触网鸟巢检测[J]. 中国铁路,2015(8):73-77.
[11] 张学工. 关于统计学习理论与支持向量机[J]. 自动化学报,2000,26(1):32-42.
[12] Prasad S, Bruce L M. Decision Fusion With Confidence-Based Weight Assignment for Hyperspectral Target Recognition[J]. IEEE Transactions on Geoscience & Remote Sensing, 2008, 46(5):1448-1456.
[13] 叶珍. 高光谱图像特征提取与分类算法研究[D]. 西北工业大学,2015.
In order to solve the problems for pantograph inspection during photographing of inspection device of collector strip of pantograph, the paper puts forward a LBP and HOG feature classification information decision fusion based pantograph inspection method. After testing, it shows that the inspection of the pantograph zone by this method, compared with adopting of single classifier for inspection, achieves much lower rate of missing and rate of error, has better inspection results and higher application values.
Local Binary Patterns (LBP); Histogram of Oriented Gradient (HOG); decision fusion, pantograph; Support Vector Machine (SVM)
10.19587/j.cnki.1007-936x.2018.05.018
U264.3+4
B
1007-936X(2018)05-0068-04
2018-01-18
别 致.西南交通大学电气工程学院,硕士研究生;
余志斌.西南交通大学电子信息工程系,副教授。
国家自然科学基金重点项目(No.61134002)。