1ZQ-440型起垄整形机的设计与试验研究
2018-11-06李宇飞胡军李庆达孔庆龙
李宇飞,胡军*,李庆达,孔庆龙
(1.黑龙江八一农垦大学 工程学院,大庆 163000;2.黑龙江省友谊农场,双鸭山 155800)
起垄整形机属于耕整地机械,起垄的目的在于防止风蚀、水蚀,革新地面灌水方式,提高水分利用率,提高肥料利用率,改善田间透光性能[1]。目前,大垄种植模式在东北地区被广泛采用[2]。大垄种植的主要优势有:大垄体积较大、垄沟数量相比常规垄更少,起垄过程中在不过多翻动土壤的前提下使地表面积大幅缩小,更利于土壤水分、温度的保持,为作物生长提供必要的温湿度条件;大垄种植方式符合目前东北比较流行多项农艺措施的要求,如玉米行间覆膜、玉米110 cm大垄双行、大豆130 cm大垄垄上三行等,这些农艺措施均建立在大垄种植模式之上[3]。但国内现有的常用起垄整形机一般只适用于垄形尺寸在20~50 cm的起垄作业,如果仅在机械的原有结构上进行改进,则难以保证起垄质量。并且现有的大部分起垄机工作幅宽较小并不适用于东北地区大垄的种植模式,这在一定程度上阻碍了东北地区种植模式的革新[4]。因此,本文运用UG软件建立起垄机模型,用ANSYS有限元分析软件对其进行模态分析,制作样机并进行田间试验,为起垄整形机的设计提供了借鉴和参考。
1 结构参数与工作原理
1.1 结构参数
根据作业需求,起垄整形机一次作业应完成起垄、整形、镇压等作业环节,因此,该起垄整形机主要结构包括起垄铧、整形铧、镇压辊、限深轮、机架、划印器、牵引架等,根据农艺的要求和动力计算,作业参数主要为:耕宽B=440 cm,起垄宽度b=130 cm,起垄高度H=14 cm,配套拖拉机动力P≥66.2 kW,作业速度V=6~8 km·h-1。起垄机结构简图如图1所示。
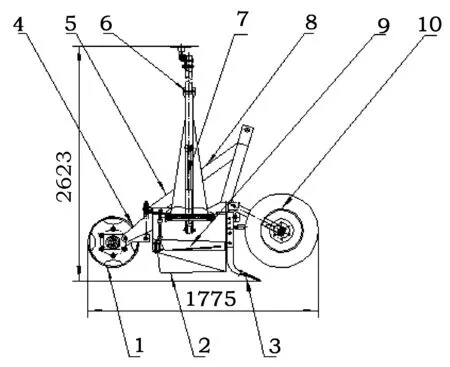
图1 起垄整形机整体结构简图Fig.1 Schematic diagram of the overall structure of the ridge shaping machine1—镇压辊; 2—整形铧; 3—起垄铧; 4—镇压辊连接架; 5—机架; 6—划印器; 7—油缸; 8—牵引架; 9—刮土板; 10—限深轮1. Rolling roller 2. Shaping3.Rising ridge 4.Rolling roller connecting frame 5.Rack 6.Marker 7.Cylinder 8. Traction frame 9. Molding plate 10. Limited depth wheel
整机采用先开沟、起垄后镇压的作业方式。由于配套拖拉机的后轮距为180 cm,可调最大轮距为200 cm,机具耕幅大于拖拉机两后轮外缘间的距离,作业时为了避免漏耕和保证拖拉机工作时的稳定性,机具采用三点全悬挂的方式[5]。
1.2 工作原理
该起垄整形机设计配套动力为66.2~88.2 kW轮式拖拉机。作业时机具与拖拉机采用三点悬挂方式连接,始终保证作业过程中起垄整形机和拖拉机相对位置的一致性。作业时起垄铧将两侧的土壤翻到中间形成垄体,而土壤被翻区域形成垄沟。同时两侧呈对称分布的整形铧在起垄刮板和镇压辊的配合下,形成梯形垄床,并完成对垄床的镇压作业。通过调节限深轮的高度和起垄铧深度,完成不同高度垄床的起垄作业。另外,起垄整形机可根据农艺要求,通过对起垄铧、整形铧、镇压辊在机架上的位置进行调整,并改变镇压辊长度,来实现不同行距大垄的起垄作业。
2 主要工作部件设计
2.1 机架设计
机架作为整个机械的连接件和承载件,为了保证稳固,采用焊接设计[6]。机架主体是由三根机架长方管、机架底板、机架侧板经由螺栓和焊接的方式连接,并且为加强机架整体强度,在机架横向均匀布置了加强背管和加强立管。其结构如图2所示。
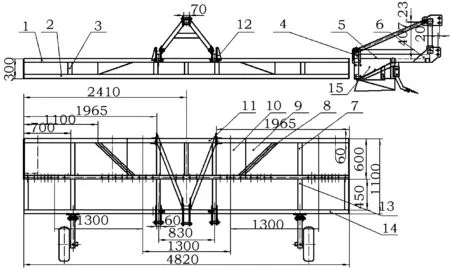
图2 机架结构图Fig.2 Frame structure1—机架后上梁; 2—机架后下梁; 3—机架加强立管; 4—悬挂斜拉座板; 5—加强背管; 6—前牵引板; 7—机架加强横管; 8—机架加强板; 9—机架底板(左1、右1);10—机架底板(左2、右2); 11—机架后上梁; 12—悬挂斜拉座板加强板; 13—复梁连接管; 14—机架复梁; 15—机架侧板1. Rear frame of the frame 2. Rear frame of the frame 3.Rack of riser for the frame 4.Suspension of the cable-stayed plate 5. Reinforced back pipe 6. Front traction plate 7. Rack reinforcement cross tube8. Rack reinforcement plate 9. Rack base plate (left 1, right 1) 10.Rack base plate (left 2, right 2) 11.Rear frame of the frame12. Suspension cable-stayed plate reinforcement plate 13. Composite beam connection pipe 14. Rack composite beam 15. Rack side plate
2.2 牵引架设计
牵引架负责连接拖拉机与起垄整形机,其结构如图3所示。当起垄整形机被拖拉机后悬挂提升之后,全部的重量都集中在牵引架,并且起垄作业时全部作用力都通过牵引架传递,因此牵引架整体采用焊接设计,并且加装加强板以提高其强度。牵引架由牵引架底座、前牵引板、上部小加强板、前加强板、后加强板、斜拉板组成,其中牵引架底座与机架通过螺栓连接,前牵引板的上部与拖拉机上拉杆连接,下部与底座相连,斜拉板上部与前牵引板上部焊接成一体,下部与底座相连,其他三块加强板用于提升整个牵引架的强度。牵引架设计时还应保证机具工作时拖拉机的下悬挂板与地面平行,从而实现拖拉机动力的高效利用,此时起垄整形机架的上平面也应与地面平行以确保起垄质量[7]。
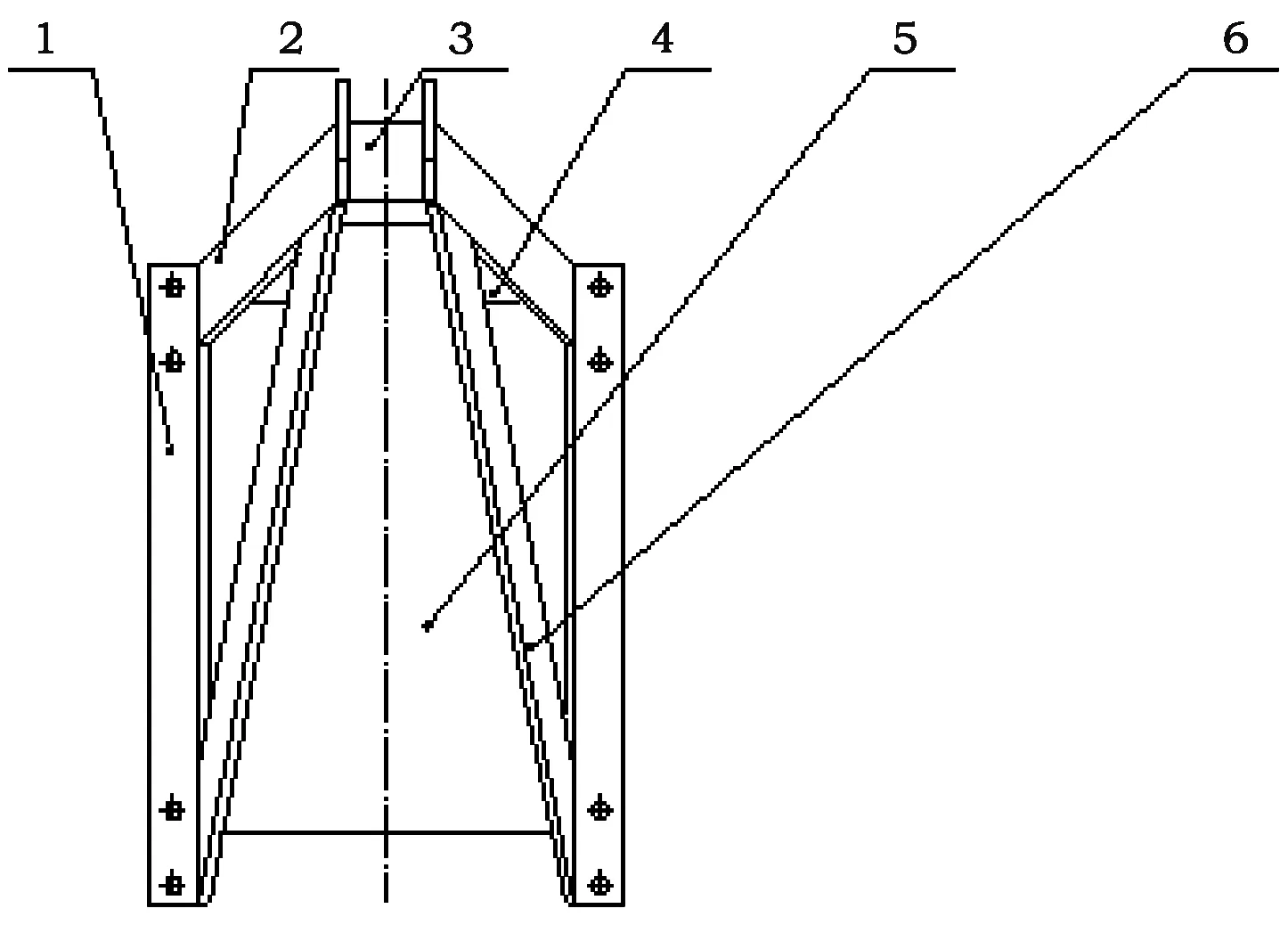
图3 牵引架结构图Fig.3 Traction frame structure1—牵引架底座; 2—前牵引板; 3—上部小加强板;4—前加强板;5—后加强板;6—斜拉板1. Traction frame base 2. Front traction plate 3.Upper small reinforcement plate4. Front reinforcing plate 5. Rear reinforcing plate 6. Diagonal pull plate
2.3 整形铧设计
整形铧由上板、平土基板、杆尺座、侧板4个部分组成,结构如图4所示。将杆尺座与整形铧焊接在一起可以方便安装起垄铧。起垄铧安装之后高度可调,从而实现不同的垄沟深度及取土量。实际工作中整形铧上的平土基板将起垄铧翻起的土向垄台中部推送,并进行初步平整,之后再经整形铧整形。
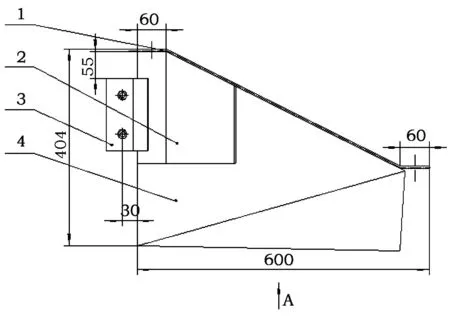
图4 整形铧总成图Fig.4 Shaping map1—整形铧由上板;2—平土基板;3—杆尺座;4—侧板1. Plastic by the upper plate 2. Flat soil substrate 3.Rod ruler 4. Side plate
3 起垄机机架建模及其模态分析
3.1 起垄机机架三维建模
机架作为该起垄整形机的主体部分,所有部件都是通过安装在机架进行工作的。作为整个机体的连接件和承载件,机架采用焊接设计,不仅可以保证强度足够而且成型方便,便于制造。[8,9]利用UG软件建立其三维模型,结果如图5所示。

图5 机架三维图Fig.5 Rack 3D diagram
3.2 起垄机机架静力学分析
三维模型建立后,利用UG高级仿真模块对模型进行静力学分析,通过受力云图和形变云图,可以判断机架在作业载荷下的结构和材料能否满足强度和刚度的要求,以检测和优化机架模型,为物理样机的试制提供依据[10~12]。
对机架模型进行静力学分析。首先,指派机架的材料以及其材料特性。将机架三维模型材料设置为Q235 碳钢(密度7 850 kg·m-3,弹性模量E 为2.1×1 011 N·m-2,泊松比0.3)焊接而成。其次是对机架模型进行网格划分,划分网格是进行有限元分析的关键一步,网格划分的优劣直接影响求解结果的准确性,划分网格单元越小,则计算越精确,但计算速度越慢。在Unigraphics高级分析模块中,可直接在模型上划分网格,通过网格生成器建立机架的3D四面体网格模型,为均衡计算精度和速度,设定网格单元大小为10 mm。最后添加约束和载荷,模拟机架工作状态,为机架选择约束条件。对起垄机整体结构分析时,选择固定约束命令对机架侧板、加强立管和加强背管6个自由度进行约束。机架受力主要受土壤抬升力,机架自身重力以及施加于机架上的配重等几个力共同作用,根据受力结果分析,计算各力值,并为机架施加各力值,选用NX NASTRAN求解器和SESTATIC-单约束结算方案进行求解得到机架模型的应变云图如图6所示,可以看到由于机架的下方管受力变形较为集中,分析原因主要由于受其下挂接的分土板、整形铧在工作过程中的抬升作用。得出在设计过程中应加强机架后方管的壁厚或改变其制作材料以提高机构强度。
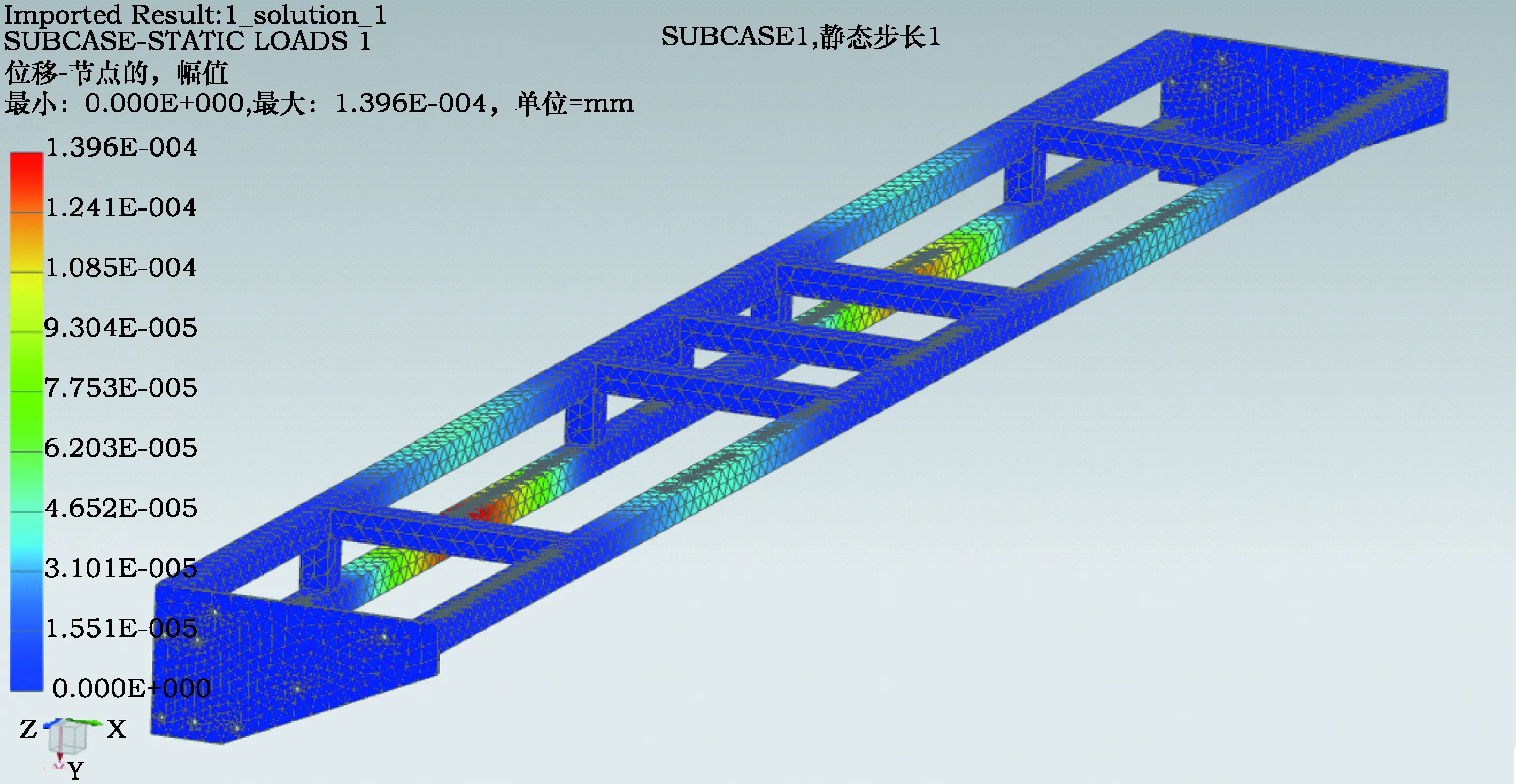
图6 机架受力应变云图Fig.6 Frame force cloud diagram
3.3 起垄机机架与牵引架装配体模态分析
模态分析是动力学分析中不可或缺的一部分,主要目的是确定机器部件或设计机构的固有频率和振型。一般情况下,低阶振动特性对结构的动态特性影响最为明显[13]。利用ANSYS Workbench模块,在静力学分析的基础上直接对机架与牵引架的装配体进行模态分析,选择自动划分网格法,对牵引架和拖拉机三点悬挂连接处施加约束,求解机架的前六阶固有频率和振型。机架前六阶模态的频率按顺序分别为11.911、14.324、29.004、41.898、42.338、53.542 Hz。
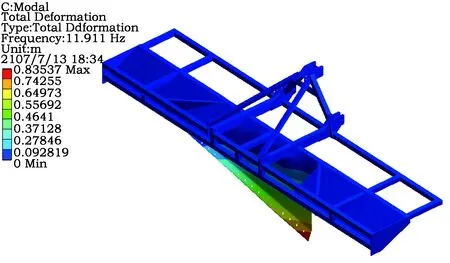
图7 第一阶模态振形图Fig.7 First order modal waveform

图8 第二阶模态的振形图Fig.8 second order modal waveform
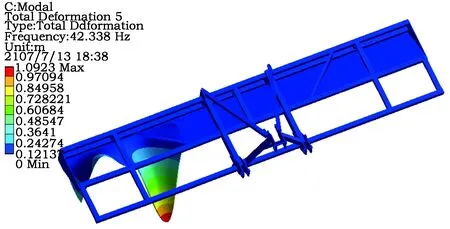
图9 第三阶模态的振形图Fig.9 Third order modal waveform
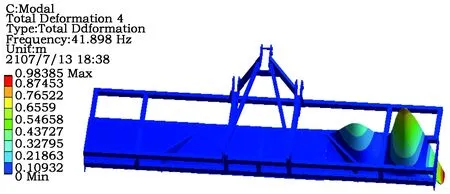
图10 第四阶模态的振形图Fig.10 Four order modal waveform

图11 第五阶模态的振形图Fig.11 Fifth order modal waveform
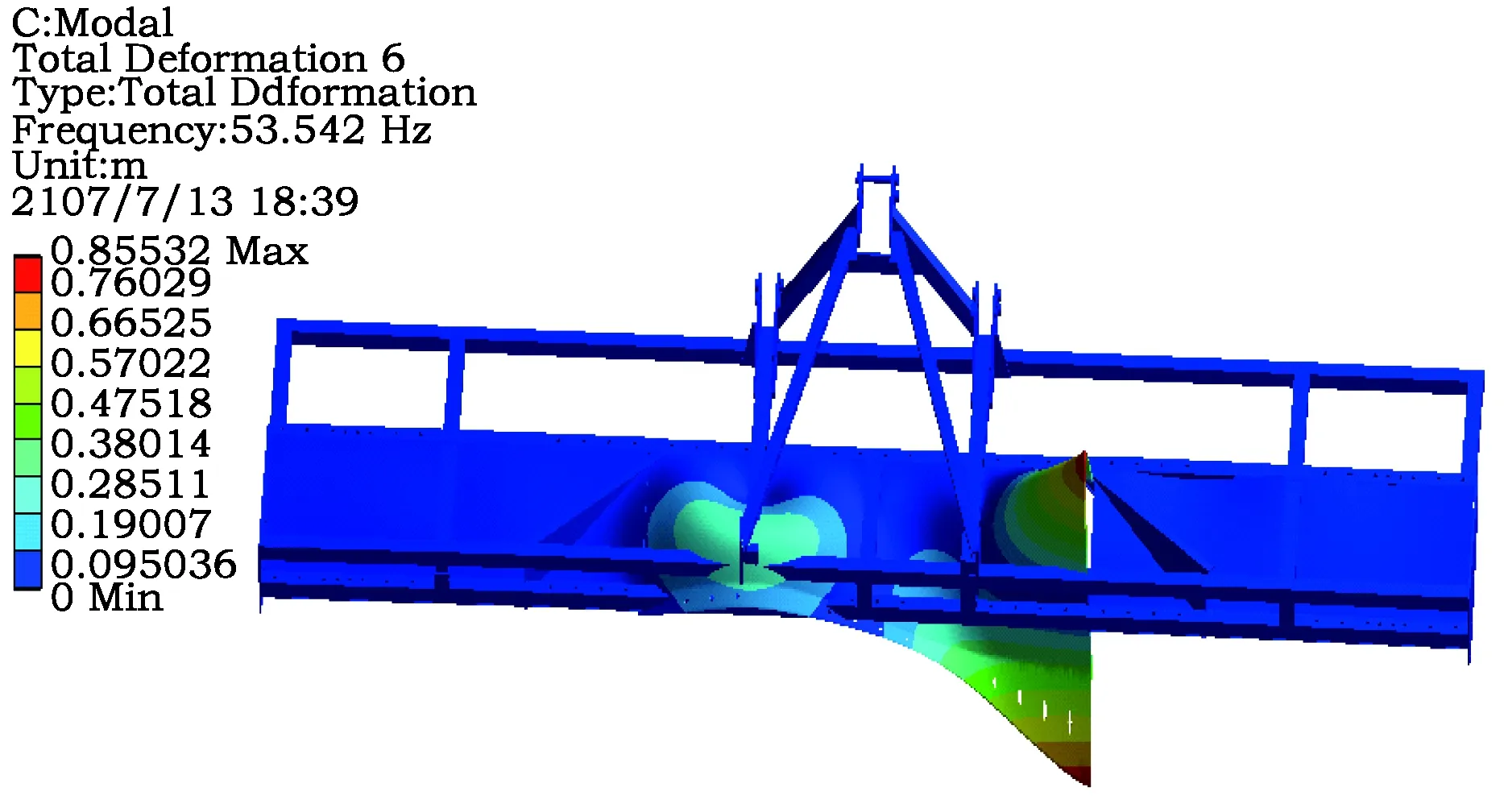
图12 第六阶模态的振形图Fig.12 Sixth order modal waveform
六阶模态的振型如图7~图12所示。由前六阶振动频率值可以看出,机架各阶的固有频率随着阶次的增加呈递增趋势, 6 阶固有频率范围分布在 10~60 Hz 之间。轮式拖拉机的轮胎对振动的高频部分有衰减作用,到机身的主要是低频(0~15 Hz)随机振动,因此不会发生特别明显的振动叠加现象[14]。从模态振型图中可看出,当振动频率达到相应固有频率时,机架的底板变形较为集中,只要设计实际振源的振动频率避开机架固有频率,机架实际变形大小不会达到最大变形量[15,16]。另外,对底板应力集中部分的结构进行强化处理也可有效解决此类问题。
4 生产性试验分析
4.1 试验方案
在黑龙江省友谊农场,以翰迪尔904拖拉机为配套动力,对该起垄整形机进行了田间试验(试验面积为150 hm2,垄底宽130 cm),测定了覆土宽度和厚度、垄宽和垄高等相关工作参数。试验选择土层深厚、土质疏松、肥力中上的旱川地,前茬作物为玉米,并要求前茬作物收获后及时整地,达到地面平整、土壤细碎、无大土块、无根茬的要求。图13为机具的实地作业情况。

图13 起垄机田间试验图Fig.13 Schematic diagram of the ridge field
田间试验作业检测项目及试验数据如表1所示。
4.2 结果分析
为量化实际作业效果,对垄底宽等5项作业指标的实际测量平均值与机具作业设计值进行对比计算,得出起垄的相对误差。如表2所示。
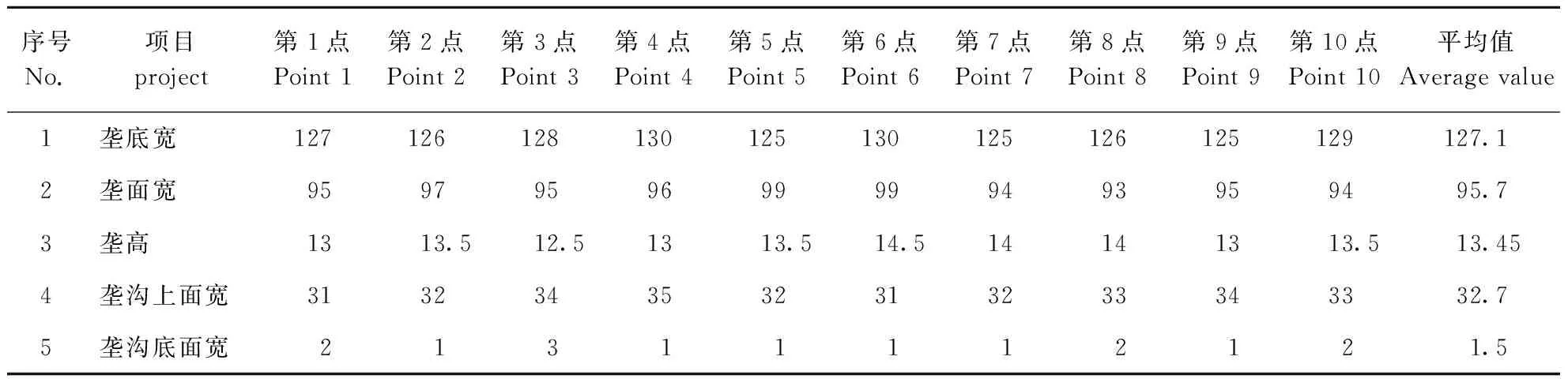
表1 试验数据记录表/cmTable 1 Test data record table
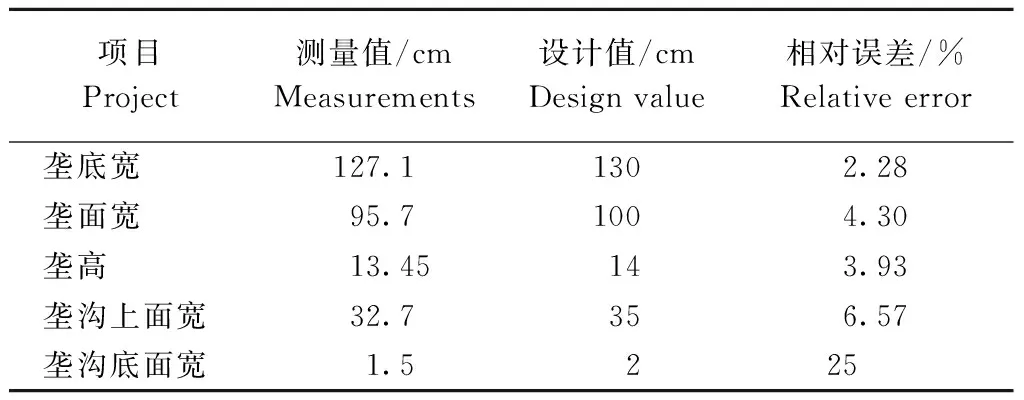
表2 起垄效果数据对比表Table 2 Ridge effect data comparison table
通过起垄效果数据对比表可以得出该型起垄机作业效果良好,除垄沟底面宽一项相对误差在25%左右外,其余测试项目相对误差均控制在5%左右,达到设计使用要求。
5 结 论
本文利用UG软件建立了起垄整形机的三维模型,并对主机架进行了静力学分析和模态分析,确定了机架的各结构参数,利用机械的应力、应变云图找出了机架的受力薄弱点和机架前六阶模态振型图,并以此为理论依据对其进行改进。制作物理样机并进行田间试验,得到:
(1)机架整体受力较为均匀,最大变形部位出现在机架下方管,最大变形量控制在10 mm以内,证明了机架结构的合理性。
(2)机架的最薄弱环节为底板。机架的三块底板焊接于机架前后横梁,虽然振动变形较大,但设计过程中可以采用避开机架固有频率和对底板进行适当的加强处理等方法解决。通过模态分析,为机架的改进设计提供了理论依据,也为实际应用提供了参考。
(3)该起垄整形机土垄垄形一致性达95%以上,垄形合格率达90%,作业指标均满足设计要求。