一种苹果采摘机器人的设计和制作
2018-11-05刘喜平王国富王国庆李子康王静波
徐 莉,刘喜平,王国富,张 建,王国庆,马 驰,李子康,王静波
(1.黑龙江工程学院 机电工程学院,黑龙江 哈尔滨 150030; 2.黑龙江省人民政府发展研究中心,黑龙江 哈尔滨 150030)
0 引 言
在苹果生产作业中,采摘作业约占整个作业量的40%。采摘作业质量的好坏直接影响到后续的储存、加工和销售[1]。由于采摘作业的复杂性,其自动化程度仍然很低,目前国内采摘作业基本上都是手工进行,研究采摘机械臂不仅具有巨大的应用价值,而且具有深远的理论意义。因此设计一款自动化程度高、成本低、效率高的苹果采摘机器人势在必行。
1 国内外苹果采摘机器人发展现状
国外现状:苹果采摘机器人在美国、韩国、日本等国家均早有研究,在1983年第一台采摘机器人在美国诞生[2],在之后的时间里,随着机器人技术和计算机技术的不断发展和日趋成熟,日本、美国等做了大量研究,并在试验中取得了一定的成功。
国内现状:20世纪90年代中期,国内才开始对采摘机器人技术进行研究,相对于其他发达国家起步晚,投资少,发展慢,且应用经验比较少[3]。国内各科研院所、高等院校针对现实需要,研究设计了一些比较实用的采摘机械手、末端执行器等。
2 主要研究内容
2.1 采摘对象及要求
所设计的苹果采摘机器人对苹果进行采摘收集,苹果直径80~100 mm,重量200~280 g;要求苹果被采摘后外无破损,收集过程中无刺伤,碰伤。机械结构简单,工作平稳可靠,操作方便,安全性能好,便于维修,成本相对低。
2.2 苹果采摘方案的拟定
该苹果采摘机器人的机械部分由采摘机构、上升机构、行走机构组成。工作过程为:机械手在找到苹果后,通过肘部、肩部的运动使手爪处于苹果下方,上升机构调整高度,手爪收缩,抓紧苹果后机械手腕部旋转,扭断果柄,然后再次通过肘部、肩部运动带动手爪将苹果放回收集位置,由收集装置将苹果收集。
3 苹果采摘机器人的总体设计
3.1 驱动方案
使用步进电机、减速电机和舵机作为动力源。其中,采摘机构使用五个舵机,使机械手实现四自由度,增大采摘范围;上升机构使用三个步进电机,用以实现二级上升;行走机构使用两个减速电机,实现行走功能。
3.2 总体布局
考虑各个机构协调工作的同时,还要考虑传动机构的不干涉性,保证各个机构都能正常有序的工作,故最终确定的整机的总体布局见图1。
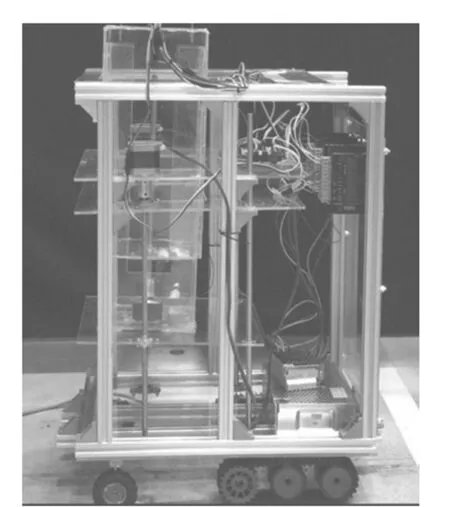
图1 苹果采摘机器人的整体布局
3.3 主要机构的结构设计
(1) 采摘机构:采摘机构设计为一个4自由度的机械手,通过此机械手来实现采摘功能,机械手由舵机驱动,自由度分别为手指张弛,用以抓取苹果;腕部旋转,用以扭断苹果果柄;肘部摆动,肩部摆动,肩部旋转,用以实现对不同位置苹果的抓取。
(2) 上升机构:上升机构设计是两级伸缩式上升,这种设计既能在工作时使机械手达到预计高度,又能在不工作时收缩到框架内,降低重心,方便运输。
上升机构,由三根丝杠和步进电机组成,其中步进电机带动两根丝杠旋转实现一级平台的上升,另外一根丝杠也由步进电机带动旋转实现二级平台的上升。具体结构见图2。

图2 上升机构结构示意图
(3) 行走机构:行走机构一方面支承机器人的机身、臂部和手部,因而必须具有足够的刚度和稳定性;另一方面,还需随时根据作业任务的要求,实现机器人在更广阔的空间内的运动。苹果采摘机器人的行走机构采用半履带车设计,这种履带式设计与普通轮式设计相比有效地增加了车轮与地面的接触面积,增加了机器人在行走过程中的稳定性;还能够适应大多数果园中的地形。车轮又分成了前后两部分,其中后面的车轮包有履带,机器人整体结构的转弯是通过左右两个履带车轮不同的转速实现的。具体见图3。
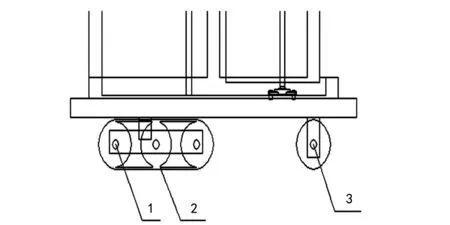
图3 行走机构结构示意图1.减速电机 2.履带 3.从动轮
3.4 总体结构设计
将以上各部分按整体布局进行组装以后形成整机,具体如图4所示。

图4 实物整机俯视图
3.5 总体程序设计
本次设计涉及多种电机的控制,因此采用性能强大的STM32F103C8T6控制器进行控制,首先运用L289N驱动模块控制机器人的运动,可在固定位置停留,后由控制器向TB6600驱动模块发送控制信号,从而控制由三个步进电机构成的双层升降结构,首先控制第一层的步进电机旋转从而带动平台的上升,再控制第二层的步进电机带动二层平台的上升(在顶端装有限位开关用以触发的保护措施),在到达指定位置后可进行自动停止,最后控制由五个舵机构成的五自由度机器手,机械手可由控制器控制每个舵机旋转的角度,以达到多角度的抓取(机械手上装有限位开关,可以识别有无抓到合适大小的苹果)。
4 结 语
本次设计的苹果采摘机器人整体设计简单,大方、操作方便快捷;行走部分采用履带式加万向轮的设计,可充分适应果园地形;伸缩机构的设计,可以对机器人的重心进行调整,以适应单独行走、采摘等功能的要求。
总体设计成本较低,设计简单,占地空间小,结构易改造,更适用于国内各型果园。各部分设计环保,设计新颖,方便维修。 减轻果农人力需求大的压力。
