智能巡检机器人行走机构的结构分析与优化
2018-11-05毛杰勇张宇舟
毛杰勇,马 勇,杨 墨,张宇舟
(湖南阳光电力科技有限公司,湖南 长沙 410000)
0 引 言
长期以来,室内设备巡检一般通过人工运用感官以及一些配套的检测仪器进行简单定性判断为主的检查。不管是人工巡检模式还是固定摄像头模式都存在工作效率低、巡检难以监控到位、不具备智能分析功能等缺陷。而室内轨道智能机器人巡检系统是一款智能型可移动的轨道式云台巡检系统,通过搭载高清摄像设备、智能传感器、自动化机电设备等,沿轨道对电力设备进行巡检,可以辅助或替代人工,全天候实现室内设备全方位(无死角)、全自主智能巡检和监控,也可以人工遥控,获取设备的图像、状态等重要信息[1-4]。室内轨道智能机器人巡检系统的应用可有效降低设备维护成本,提高设备巡检质量、效率和智能化水平,为智能电网和无人值守提供新型的技术检测手段和可靠的安全保障,具有巨大的社会效益、经济效益和安全效益,市场应用前景广阔[5-8]。
轨道式智能机器人巡检系统主要由轨道总成、控制系统、水平行走装置、升降运动装置以及云台总成等五部分组成。水平行走装置控制设备的行进方向,行走机构的设计关系着设备传动的平稳性和定位的精确性。就智能巡检机器人行走机构进行探讨,采用有限元分析方法对行走支架进行力学分析和优化。
1 行走支架静力分析
1.1 参数化模型构建
为了更好地分析行走支架在工作过程中的受力、变形以及参数的优化,建立准确的行走支架的有限元模型。在Autodesk Inventor环境下建立行走支架三维模型,将其导入到Ansys Workbench中进行行走支架的静力分析,创建的模型如图1所示。
行走支架板厚4 mm,材料均为Q235制造,行走支架总重为0.81 kg。在Material选项中设置为Structural Steel,弹性模量为200 GMPa,泊松比0.3,屈服强度235 MPa。应用ANSYS Workbench对行走支架进行网格划分。网格划分的结果如图2所示。
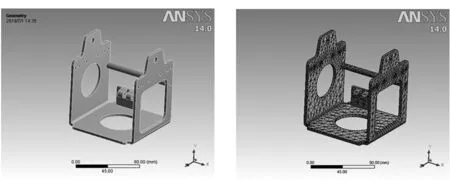
图1 行走支架三维模型图2 行走支架网格划分
1.2 施加约束及载荷
载荷和边界条件的施加与实际工况的吻合度直接影响到有限元的分析结果,为了提高分析结果的准确性,模拟实际工作状态加载及约束。行走支架通过支架两侧通孔螺栓连接到导轮固定在轨道上,约束应加载在支架两侧通孔面上[9-11]。行走支架所受载荷主要为设备自重,取设备最大承重量50 kg,在支架底板上施加500 N。约束和载荷施加结果如图3所示。
1.3 有限元分析结果
基于Ansys Workbench分析平台对所建模型进行求解,可得出行走装置上行走支架的总变形云图和应力云图,如图4和图5所示。

图3 行走支架约束及载荷图4 总变形云图
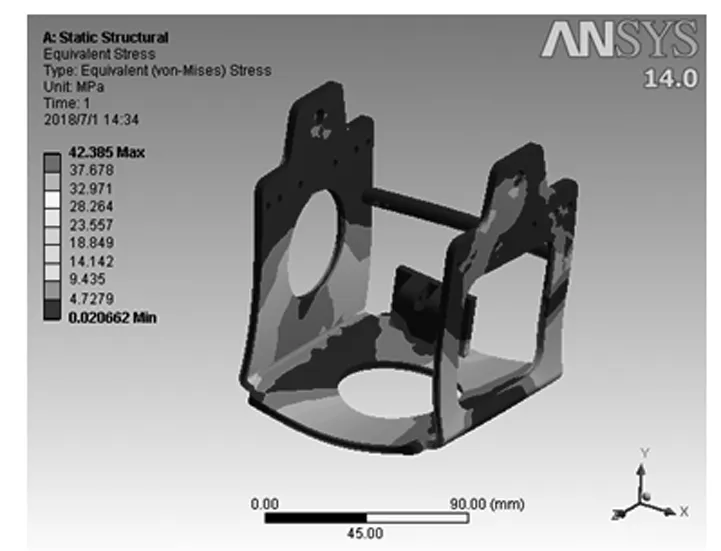
图5 应力云图
由图4可知,行走支架发生了弯曲变形,最大变形为0.058 661 mm,变形很小,满足刚度要求。行走支架的云图如图5所示,行走支架底板与铰链焊接接触处应力最大,其值为42.385 MPa。一般钢材的使用安全系数为1.6~2.5,则许用应力为94~147 MPa。且求解出的最小安全系数为5.9,因此行走支架满足强度要求。
2 改进及优化分析
智能巡检机器人行走机构的设计关系着设备传动的平稳性和定位的精确性。在市场要求中,既要求设备运行的稳定性,同时也要求设备的轻量化。在不影响设备稳定运行的条件下,对行走支架进行轻量化处理。
2.1 A优化方案
行走支架板厚3 mm,材料为Q235,行走支架总质量为0.62 kg。在Material选项中设置为Structural Steel,弹性模量为200 GMPa,泊松比0.3,屈服强度235 MPa。应用ANSYS Workbench对行走支架进行计算求解与结果分析。
2.2 B优化方案
行走支架板厚4 mm,材料为2A12铝合金,在Material选项中设置为Aluminum Alloy,弹性模量为71 GMPa,泊松比0.33,密度为2 770 kg/m3,屈服强度325 MPa。应用ANSYS Workbench对行走支架进行计算求解与结果分析。
2.3 方案对比
在A优化方案中,通过行走支架总变形云图行走支架模型最大总变形升为0.129 99 mm;最大应力升为69.55 MPa。行走支架质量降为0.62 kg,求解出的最小安全系数为3.594 5。
在B优化方案中,通过行走支架总变形云图行走支架模型最大总变形升为0.165 59 mm;最大应力降为41.83 MPa。行走支架质量降为0.28 kg,求解出的最小安全系数为6.693 8。
从表1中数据可知,两种方案虽然对模型的总变形都有所提高,但变形都很小,满足刚度要求。整体考虑,B方案对模型进行了比较全面的优化,该方案在满足强度要求的同时,支架的重量降低了3倍,也提高了安全系数, 更适用于实际效果。
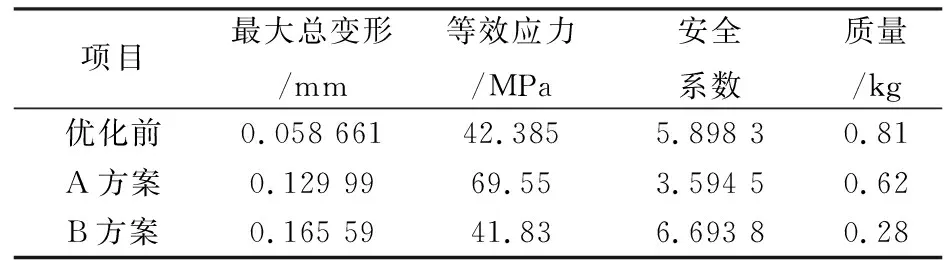
表1 方案优化前后对比表
3 模态分析
模态分析即自由振动分析,是研究动力特性的一种近代方法。模态分析主要用于确定机构和设备零部件的固有频率和振型特性,是为其他动力学分析提供最基本的分析数据的基础[12-13]。行走支架在轨道式智能巡检机器人巡检工作过程中的振动对检测装置(如云台)的抖动有很大的影响,进而对巡检数据的效率和准确率产生很大的影响。
3.1 模态分析结果
对行走机构的模态分析步骤与静力分析类似,对优化方案后结构只施加约束条件无载荷的模态分析。机构的模态分析中的低阶振动固有频率比高阶频率对结构振动特性影响较大,且对该结构所关注的问题为低频振动,故在对行走机构模态分析时只提取前6阶固有频率和振型。行走机构固有频率及振型如表2及图6所示。
由表2可知行走机构的1阶模态频率较低,由图6可知行走机构1阶模态振型中底板上水平位移最大。该机型配备的电机常用工作转速在300~1 500 r/min,由其产生的激励振动频率为5~25 Hz。从表2中可得出行走机构的一阶固有频率远大于电机激励振动频率。故行走支架在工作状态下不易产生共振。
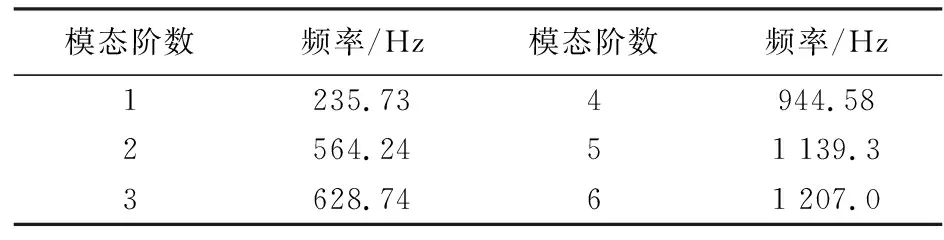
表2 行走机构前六阶模态频率

图6 行走机构前六阶模态振型
4 结 论
通过Ansys Workbench对智能巡检机器人行走支架进行静力学分析、改进优化分析及模态分析,可得出以下结论:
(1) 从静力学分析结果来看,智能巡检机器人行走支架的变形较小,刚度及强度满足设计要求。
(2) 从改进优化分析结果来看,全部方案的变形都很小,都能满足刚度要求。其中B方案(行走支架板厚4 mm,材料采用2A12铝合金)在满足强度要求的同时,支架的重量降低了三倍,也提高了安全系数。综合比较推荐使用B方案。
(3) 从模态分析结果来看,智能巡检机器人行走机构的前六阶固有频率避开了电机的激振频率。模态分析为智能巡检机器人行走机构的动态分析提供了理论依据。