某电动汽车麦弗逊悬架参数化的多目标优化设计
2018-11-05周新涛陈经涛
马 娜,周新涛,陈经涛
(1.陕西通家汽车股份有限公司 汽车工程研究院,陕西 西安 710018; 2.西安汽车科技职业学院 机械工程系,陕西 西安 710600)
0 引 言
麦弗逊悬架是诸多悬架形式中最具有代表性的一种,主要由弹性元件、阻尼元件以及导向机构等组成。其中,悬架导向机构用于传递车轮和车身间除弹性元件垂直力以外的力和力矩[1],合理布置导向机构的空间位置,可获得较好的前轮定位参数以及轮距等变化特性,确保车轮按照特定的运动轨迹行进,提升车辆操纵稳定性和行驶平顺性,延长轮胎使用寿命[2]。
考虑到悬架空间导向机构对悬架性能影响较大,而任一硬点位置的改变对悬架诸多性能的影响具有交互性[3-4],运用单一变量法难以准确地研究硬点位置对悬架运动特性的影响。文献[5]~[7]建立了悬架导向机构的数学模型,运用多目标遗传算法对悬架性能进行了优化。文献[8]~[10]运用仿真软件建立了悬架导向机构分析模型,优化了悬架运动特性。
借助动力学仿真软件,通过对悬架多硬点坐标进行实验设计与灵敏度分析,找出影响悬架运动性能的主要因素,再将其作为变量参数,并以某标杆车的实测运动曲线作为优化目标,采用响应面法对悬架性能进行优化设计。
1 悬架动力学模型建立
1.1 悬架动力学模型简化
建立悬架动力学模型时,将悬架性能影响较小的零部件进行忽略和简化,把没有相对运动关系的零部件组合为一体,确定重新组合后零部件间的连接关系和连接点的位置。模型简化原则如下:
(1) 零部件的形状对仿真结果没有影响,建模时只需输入该部件的质量特征参数即可。计算或测量重新组合后的零件质量、质心位置及转动惯量,在连接点的基础上建立零件的几何拓扑模型。
(2) 除了轮胎、阻尼元件、弹性元件、部分柔性部件(如稳定杆,副车架)以外,其余零件认为是刚体,在仿真分析过程中不考虑它们的变形。
(3) 对于刚体之间的柔性连接用弹性橡胶衬套来模拟,各运动副内的摩擦力忽略不计。
1.2 悬架动力学模型
根据图1中麦弗逊悬架的结构图,经简化后可得出图2的空间结构拓扑图。悬架导向机构由减振器上体3、转向节总成4、转向拉杆5、下摆臂7组成。当车轮上、下跳动时,车轮与转向节绕主销AD摆动,同时受到转向拉杆BC的制约,而转向节上D点随着下摆臂NDM沿着虚轴臂DO绕O点转动[11]。分析发现,点B、点C和点D为悬架设计时重点考察对象。
多体动力学仿真软件利用刚体i的质心的笛卡尔直角坐标系与表示刚体方位的欧拉角作为分析的广义坐标qi,即如式(1)、(2)所示:
(1)
(2)
因所采用的广义坐标qi具有非独立性,导致微分方程具的解有高度的耦合性,该方程的解就不易求出。而多体动力学仿真软件运用拉格朗日算子法建立了悬置系统的运动学方程,如式(3)所示:
(3)
完整约束方程:φ(q,t)=0
式中:T为悬置系统势能;q为广义坐标阵;Q为广义力阵;ρ为完整约束的拉氏算子的列阵;μ为非完整约束的拉氏算子列阵。
多体动力学仿真软件在计算中,采用了修正后的Newton-Raphson算法求解非线性微分方程,迭代校正公式如式(4)所示:
(4)
式中:μ为广义速度列阵;λ为作用反力列阵;F为系统力学方程;Φ为完整约束方程;G为非完整约束方程;j为迭代次数。
仿真软件通过重复迭代式(4)所示的校正方程,直到收敛条件和计算误差值满足求解要求时为止。
2 悬架性能实验设计
2.1 实验方法
(1) 设计变量
通过悬架导向机构的运动规律分析,选择对悬架运动特性影响较大的硬点,即转向拉杆外点B、转向拉杆内点C以及下摆臂外点D的坐标作为实验设计的变量因子。
(2) 实验目标
选取车轮定位参数(前束角、外倾角)、车轮侧向滑移(轮距的变化)以及悬架垂向刚度等体现悬架运动性能的主要因素作为分析参数,将该参数与某标杆车相应实测值的偏差平方和作为实验目标。
由图2中悬架的结构图,可以推导出:悬架前束角θ、外倾角Ψ、轮心侧向滑移量(半轮距变化)ΔSlat、悬架垂向刚度kZ的计算表达式,如式(5)~(8)所示:
(5)
(6)
(7)
(8)

(3) 全面实验法
全面实验考虑了每个因素的每个水平均相互搭配,能全面分析设计变量对目标值的影响程度。本全面实验为9因素2水平,共计512次实验,实验因素及水平如表1所示。
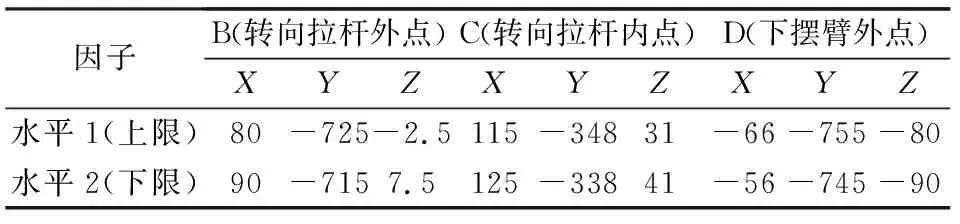
表1 实验因素水平表
2.2 灵敏度分析
对悬架运动特性参数的灵敏度分析,用于衡量设计变量对动态响应的影响程度[12]。以同向轮跳为例,通过本次的设计实验计算,可得出前束角、外倾角、轮心侧向滑移量、悬架垂向刚度对硬点坐标变化的值,并对其参数进行灵敏度分析。悬架特性参数对硬点坐标改变的灵敏度值,如表2所示。

表2 悬架特性对硬点坐标的灵敏度
表2中,正值表示硬点坐标的变化与响应特性的变化趋势一致,负值表示两者变化趋势相反。从表2中可知,通过合理改变XB、ZB、XC、ZC、XD、ZD坐标,对前束角运动性能的提高非常有效;XB、ZB、XC、ZC、XD、ZD坐标对外倾角的影响较小;ZB、XC、ZC、YD坐标对轮心侧向滑移量的影响也较小;悬架垂向刚度对9个坐标参数都不敏感。由灵敏度分析,找出了影响悬架性能参数的主要因素,通过有针对性的参数优化,可节省工程计算时间,且能得到较为理想的参数值。
3 悬架性能优化设计
3.1 优化设置
(1) 工况设置:选取具有代表性的同向轮跳工况,为了与标杆车实测结果比较,仿真分析与实验测试边界条件保持一致,即轮跳量设置为-100~75 mm。
(2) 设计变量:从实验设计分析结果中,选取对悬架运动特性影响较大的硬点参数作为设计变量进行优化,在文中优化分析时,选择灵敏度值大于1的变量参数,如XB、ZB、XC、ZC、XD、ZD,不考虑YB、YC、YD对悬架特性的影响。
(3) 响应目标函数:因悬架垂向刚度对设计变量的变化并不敏感,因此只需考虑前束角、外倾角、侧向滑移量作为响应目标。
前束角、外倾角单位为角度,侧向滑移量单位为毫米,响应目标的量纲并不一致。因此,可设计两个响应目标函数,通过设计变量的优化计算,求解各目标函数的最小值,使悬架各项性能到达理想状态。其目标函数表达式,如式(9)、(10)所示:
目标函数1:
y1=k1×(θ1-θ0)2+k2×(Ψ1-Ψ0)2
(9)
目标函数2:
y2=(ΔSlat1-ΔSlat0)2
(10)
式中:θ1、Ψ1、ΔSlat1为将要优化的前束角、外倾角和轮心侧向滑移量;θ0、Ψ0、ΔSlat0为某标杆车的相应实测值,k1、k2为所考察指标的权重值,通过调整该值,可改变优化侧重点,能够有针对性的考虑更需要优化的、变化幅度较其他参数更大的性能参数。当权重值均为1时,各性能参数指标以相同的关注度进行综合考虑。
(4) 优化分析方法:采用自适应响应面分析法进行寻优计算,可以连续地对设计变量各个水平进行分析,使所得的优化结果具有更高的可靠性。
3.2 优化结果分析
(1) 硬点位置对悬架性能的影响
图3所示分别给出了B点、C点、D点的X、Z坐标变化对响应目标的影响规律,将响应目标值设置为目标函数1与目标函数2之和,即综合考虑了前束角、外倾角和侧向滑移量的变化情况。图3(a)中,当B点X坐标在84~88 mm之间,同时Z坐标在3.5~7.5 mm之间变化时,响应目标函数取值较小。图3(b)中,C点X坐标在117~121 mm之间,同时Z坐标在32~34 mm之间变化时,响应目标函数取值较小。图3(c)中D点X坐标在-58~-56 mm之间,同时Z坐标在-82~-80 mm之间变化时,响应目标函数取值较小。
由上述分析可知,硬点坐标的变化对响应目标的影响并不规律,因此在设计开发阶段,有必要用优化的方法设计悬架导向机构的空间硬点位置,以便掌握悬架性能的变化的趋势。
(2) 悬架性能优化分析
图4为前束角的目标值、初始值,以及优化值随轮跳的变化曲线图。初始状态的前束角与目标值差异较大,在轮下跳为-100 mm时,初始前束角-2.2°,远超出前束角的取值下限-0.6°,且初始前束角随轮跳的变化幅度较大,将会破坏汽车的直线性能,使汽车偏离原来行驶方向,造成汽车跑偏,增加轮胎磨损。优化后的前束角与目标值较为接近,前束角的变化范围为-0.4°~0.1°,曲线变化幅度较小,有利于汽车直线行驶的稳定性。

图3 硬点位置与响应目标的关系
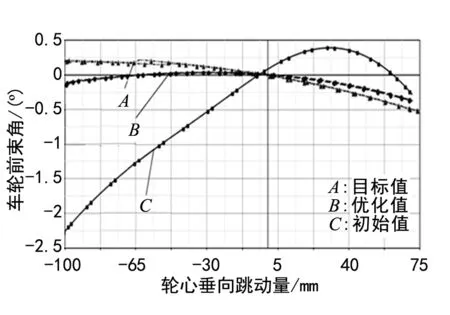
图4 前束角随轮跳的变化曲线
图5为外倾角的目标值、初始值以及优化值随轮跳的变化曲线图。三条曲线变化趋势一致,且差异较小,变化范围均为-0.6°~2.3°。在下跳时,外倾角沿正向增大,上跳时沿负向增大,此变化趋势可为汽车提供小量不足转向特性,增加横向附着能力,即合理的车轮外倾可提高前轮工作的安全性和转向操纵的轻便性[13-14]。
图6为轮心侧向滑移量的目标值、初始值以及优化值随轮跳的变化曲线图。初始状态侧向滑移量随轮跳的变化幅度较大,初始值与目标值最大偏差为5mm。侧向滑移量体现了一半的轮距变化,它将使滚动行驶中的车轮产生侧向运动,从而引起轮胎侧偏,使得汽车偏转,降低直线行驶能力。优化后的侧向滑移量与目标值一致性较好,且总体上变化范围较小。当侧向滑移量的变化不大时,能够减小轮胎侧磨,使行驶中的车辆具有良好的直线行驶性能。

图5 外倾角随轮跳的变化曲线
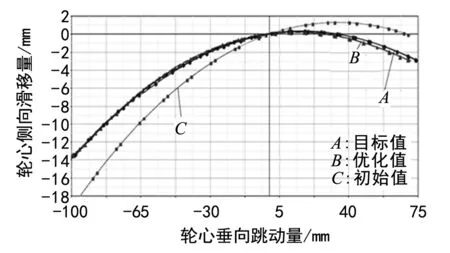
图6 轮心侧向位移随轮跳的变化曲线
图7为轮心垂向力的目标值、初始值以及优化值随轮跳的变化曲线图。轮心垂向力与垂向位移的比值为悬架垂向刚度。图中,优化前后的垂向刚度变化不明显,此现象与第三节处灵敏度分析的结果一致,即硬点坐标的变化对垂向刚度的影响较小。悬架刚度既影响操纵性与舒适性,还决定了悬架偏频及整车平顺性。优化前后的曲线均呈现近似线性的变化趋势,因此悬架刚度在轮跳时变动较小,可保持悬架具有稳定的运动特性。

图7 轮心垂向力随轮跳的变化曲线
4 结 论
采用多体动力学仿真软件,建立了麦弗逊悬架运动学模型。根据悬架运动的特性对导向机构硬点坐标进行灵敏度分析,得出了硬点位置在垂向和纵向变化对前束角的影响最大,对外倾角和轮心侧向滑移量的影响较小,但对悬架垂向刚度的影响并不明显。在此基础上,将悬架导向机构的主要硬点坐标作为变量,并将某标杆车的前束角、外倾角以及侧向滑移量的实测值作为优化目标进行分析。结果表明:悬架导向机构的参数化设计,使其运动特性能够达到理想的状态。当车轮跳动时,能保证汽车按特定的轨迹行驶,从而提高了汽车操纵稳定性和行驶平顺性。
