硬X射线调制望远镜卫星多样性姿态控制及在轨验证
2018-11-03柯旗王晓磊刘洁傅秀涛
柯旗 王晓磊 刘洁 傅秀涛
(北京控制工程研究所,空间智能控制技术国家级重点实验室,北京 100094)
硬X射线调制望远镜(HXMT)卫星搭载了我国自行研制的X射线调制望远镜,通过载荷光轴(沿本体+X轴)对天进行指向观测,能够全面、深入地研究分布于天球不同位置的黑洞双星、X射线脉冲星等天体目标。卫星运行在平均轨道高度为550 km,轨道倾角为43°的圆轨道,与其它近地卫星不同的是,HXMT卫星采用的不是传统的对地定向姿态控制,而是依据巡天观测、定点观测、小天区扫描等观测任务设计的对日定向慢旋,惯性定向三轴稳定,惯性定向循环小角度旋转等多种指向控制,这就构成了HXMT卫星所特有的多样性姿态控制组合。由于HXMT卫星定姿过程中有规避地球和规避太阳等约束条件,使得卫星在姿态控制策略的设计上更具有独特性。
本文对巡天观测、定点观测、小天区扫描等对天观测任务中所采用的姿态控制算法进行了说明,并就每种观测任务中所涉及的约束条件在算法层面上进行了总结,最后对每种控制算法所达到的控制效果进行了数学仿真分析和在轨数据验证。
1 各工作模式下的姿态控制方法概述
1.1 巡天观测工作模式的姿态控制方法
卫星本体质心坐标系(简称本体系)定义如下:①原点Ob,以卫星质心为原点;②X轴,与载荷光轴平行;③Z轴,与X垂直,帆板零位负法线方向为轴Z方向;④Y轴,按右手坐标系与X、Z轴正交。
地心赤道惯性坐标系简称为惯性系。本文卫星目标系的原点为目标天区中心,Xti、Yti、Zti分别为其3个坐标轴,xti、yti、zti分别为其3个单位矢量。
巡天观测的作用是构建完整的全天球天体目标图谱,采用的是对日定向慢旋的控制方式。具体实现是令卫星的-Z轴对日,载荷光轴(沿本体+X轴)指天,利用轨道运行和太阳运动,在半年时间内完成一次全天球扫描。
巡天观测的要求如下:①卫星本体-Z轴对日指向精度≤0.25°(3σ);②巡天模式时,控制本体绕-Z轴的自旋速度和自旋方向,保证沿本体+X轴方向安装的有效载荷视场不受地球遮挡;③要求本体+X轴与地心连线夹角不小于85°。
巡天模式的姿态定向模式示意见图1。

图1 巡天模式姿态指向示意图Fig.1 Global observing mode pointing
在巡天模式下卫星的姿态控制策略设计如下。
1)目标系相对惯性系的方向余弦阵计算
式中:Si为本体质心到太阳的矢量在惯性坐标系下的坐标;Ei为本体质心到地心的矢量在惯性系下的坐标;Cti为目标系相对于惯性系的方向余弦阵。
2)姿态确定算法
利用星敏和陀螺的滤波算法可以得到本体相对惯性系的姿态矩阵Cbi,计算本体相对目标系的姿态矩阵四元素Cbt=Cbi·CTti,并由Cbt得到本体相对目标系的姿态四元素Qbt,以Qbt作为控制器的输入进行姿态控制,令卫星的本体系与目标坐标系重合。
3)避免载荷视场受到地球的遮挡
由式(3)可推出:

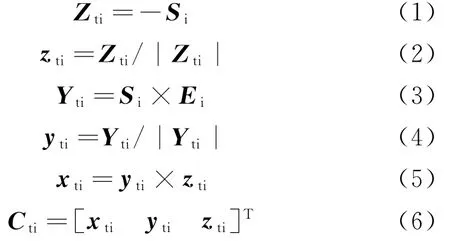
由上述推导可知:Xti和Ei夹角的幅值大于90°,所以采用上述算法载荷的视场不会受到地球遮挡。图2给出了巡天观测模式下一天的数学仿真曲线,卫星的-Z轴对日,控制误差<0.01°,载荷光轴(+X)和地球的夹角>90°,满足控制指标和约束条件要求。
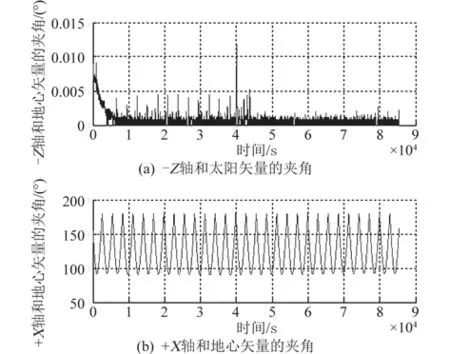
图2 -Z轴和太阳矢量夹角,+X轴和地心矢量夹角图Fig.2 Angle between the sun vector and-Z axis,angle between the earth vector and+X axis
1.2 定点观测工作模式的姿态控制方法
在望远镜需要对某一天体目标进行长期观测时,卫星采用定点观测工作模式,即惯性定向三轴稳定:控制本体+X轴(有效载荷光轴)指向惯性空间某一观测目标,太阳矢量(由本体指向太阳)平行于本体XOZ面,且与本体-Z轴夹锐角。
定点观测的控制指标和约束条件如下:
(1)姿态指向精度≤0.1°(3σ);
(2)姿态指向稳定度≤0.005°/s(3σ);
(3)太阳矢量(由本体指向太阳)平行于本体XOZ面,且与本体-Z轴夹锐角。
定点模式的姿态定向模式示意见图3。
图3 定点观测模式姿态示意图Fig.3 Fixed pointing observing mode attitude
在定点观测模式下卫星的姿态控制策略如下:
1)目标系相对惯性系的方向余弦阵计算

式中:li为给定的惯性指向(在地心惯性系下表示)。
2)姿态确定算法
利用星敏和陀螺的滤波算法可以得到本体相对惯性系的姿态矩阵Cbi,计算本体相对目标系的姿态矩阵四元素Cbt=Cbi·CTti,并由Cbt得到本体相对目标系的姿态四元素Qbt,以Qbt作为控制器的输入进行姿态控制,令卫星的本体系与目标坐标系重合。
3)约束条件
太阳矢量(由本体指向太阳)平行于本体XOZ面,且与本体-Z轴夹锐角。
(1)由目标坐标系的建立可知,太阳矢量必定在XOZ面内;
(2)由式(9)和(10),可推出
由式(14)可知,-Zti和Si的夹角幅值小于90°。
图4为定点观测下,一天时间太阳矢量和本体-Z轴的夹角曲线,验证了上述算法能够保证卫星的+Z方向不受晒。
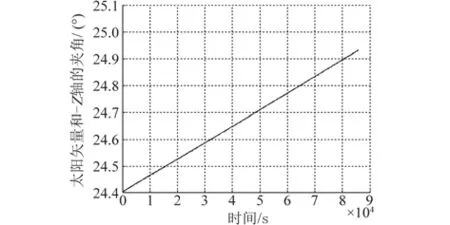
图4 定点观测模式太阳矢量和-Z轴夹角图Fig.4 Angle between the sun vector and-Z axis
1.3 小天区扫描观测工作模式的姿态控制方法
小天区扫描观测工作是为集中观测某一小型天区而设计的。当望远镜需要对某一片天区内的一个大型或多个小型天体目标进行观测时,卫星可以通过循环扫描的路径规划方式令载荷光轴的轨迹覆盖该片天区,从而一次性地获取该区域的完整信息。具体实现方式是:控制本体+X轴(有效载荷光轴)指向局部天区,控制本体绕Y轴和Z轴按指定角度和角速度旋转,实现逐行连续扫描。
小天区扫描观测的控制指标为:姿态指向精度≤0.1°(3σ)。小天区模式扫描方式示意见图5。

图5 小天区模式扫描方式示意图Fig.5 Space section scanning mode pointing track
1)目标系相对惯性系的方向余弦阵计算
(1)原点设定


其中,定义A×B为局部天区大小;li为给定的惯性指向(在地心惯性系下表示,指向局部天区的中心);Cz,Cy分别为绕Z轴和Y轴旋转的方向余弦阵;ΔA,ΔB为绕本体Z轴和Y轴旋转的角度,初值为0。
(2)扫描逻辑为
如果ΔA<A,则ΔA=ΔA+ωy·Δt,否则ΔA=0,ΔB=ΔB+ωz·Δt。当ΔB>B时,小天区扫描结束。其中Δt为控制周期;ωy为扫描角速度,ωz为扫描掉头角速度。
2)姿态确定算法
利用星敏和陀螺的滤波算法,可以得到本体相对惯性系的姿态矩阵Cbi,计算本体相对目标系的姿态矩阵四元素Cbt=Cbi·,并由Cbt得到本体相对目标系的姿态四元素Qbt,以Qbt作为控制器的输入进行姿态控制,令卫星的本体系与目标坐标系重合。图6中目标覆盖的天区范围为圆形区域,从图中可以看出小天区扫描完整覆盖目标天区;图7为小天区扫描指向赤经赤纬的局部放大曲线,图中的扫描宽度与指令宽度一致,满足要求。

图6 小天区扫描指向的赤经、赤纬图Fig.6 Rightascension and declination of the space section scanning mode
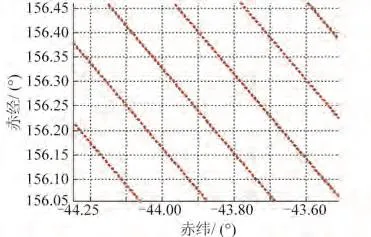
图7 小天区扫描指向的赤经,赤纬局部放大图Fig.7 Local enlarged graph of right ascension and declination of the space section scanning mode
2 在轨验证情况
HXMT卫星入轨工作已超过一年,其中巡天观测、定点观测、小天区扫描等作为主要工作模式均已在轨实现,具体指标实现情况参见表1。各个工作模式的姿态控制效果可参见本节的图8至图13各曲线图,图中数据均来自卫星的实时遥测数据,蓝色线表示滚动轴,红色线表示俯仰轴,黑色线表示偏航轴。图8、图9、图10分别描绘了巡天观测、定点观测、小天区扫描模式下本体角速度的实时遥测数据,图11、图12、图13则分别给出了巡天观测、定点观测、小天区扫描模式下卫星三轴姿态和姿态角度的控制误差曲线。

表1 卫星在轨控制指标统计情况Table 1 Onboard attitude control precision statistics
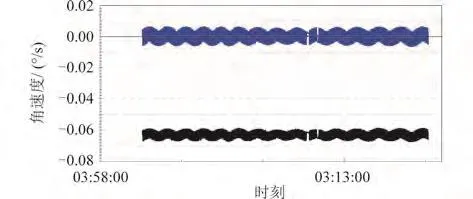
图8 巡天模式下的星上姿态角速度曲线Fig.8 Angular velocity of the global observing mode

图10 小天区扫描模式下的星上姿态角速度曲线Fig.10 Angular velocity of the space section scanning mode
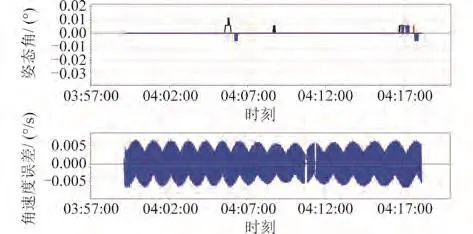
图11 巡天模式下的星上姿态曲线Fig.11 Attitude curve of the global observing mode

图12 定点观测模式下的星上姿态曲线Fig.12 Attitude curve of the fixed pointing observing mode
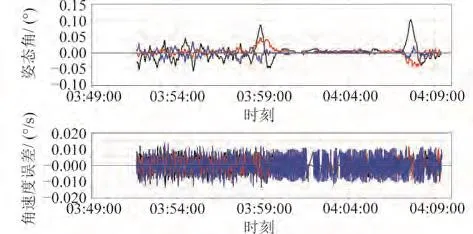
图13 小天区扫描模式下的星上姿态曲线Fig.13 Attitude curve of the space section scanning mode
3 结束语
按照HXMT卫星巡天观测、定点观测、小天区扫描等对天观测任务的需求,控制系统设计了多样性的控制算法,本文给出了相关算法的详细说明,并附上了数学仿真和在轨数据的验证。所述的各种姿态控制算法在HXMT卫星空间探索中都起到了关键作用,在满足各任务控制指标和规避条件后,HXMT卫星已经获取了许多有价值的天体研究资料,控制系统在卫星的实际应用和在轨表现上起到了良好的作用,可为后续空间观测卫星的空间指向和空间扫描等控制算法设计提供借鉴意义。
参考文献(References)
[1]章仁为.卫星轨道姿态动力学与控制[M].北京:北京航空航天大学出版社,2006 Zhang Renwei.Satellite orbit attitude dynamics and control[M].Beijing:Beijing University of Aeronautics and Astronautics,2006(in Chinese)
[2]屠善澄.卫星姿态动力学与控制[M].北京:宇航出版社,2002 Tu Shancheng.Satellite attitude dynamics and control[M].Beijing:China Astronautics Press,2002(in Chinese)
[3]Marcel J Sidi.Spacecraft dynamics&control[M].USA:Cambridge University Press,1997
[4]王新民,张俊玲,袁军,等.基于动量轮的航天器全姿态捕获技术[J].空间控制技术与应用,2014,40(5):14-18 Wang Xinmin,Zhang Junling,Yuan Jun,et al.Global attitude acquisition of spacecraft by reaction wheel[J].Aerospace Control and Application,2014,40(5):14-18(in Chinese)
[5]EI G A.Optimal control of a rigid spacecraft programmed motion without angular velocity measurements[J].European Journal of Mechanics,2006,25:854-866
[6]王淑一,魏春岭,刘其睿.敏捷卫星快速姿态机动方法研究[J].空间控制技术与应用,2011,37(4):36-40 Wang Shuyi,Wei Chunling,Liu Qirui.A quick attitude maneuver algorithm for agile satellites[J].Aerospace Control and Application,2011,37(4):36-40(in Chinese)