亭子口水利枢纽消力池水下机器人智能巡检系统初探
2018-11-02
(嘉陵江亭子口水利水电开发有限公司,四川 苍溪,628400)
1 概述
亭子口水利枢纽表孔消力池是由中导墙、右导墙、表坎及护坦围成的四方体结构,底部布置有3纵3横封闭帷幕灌浆及排水交通廊道,护坦顶面高程355m,池长135m,池宽143.5m,消力池尾坎为连续式,坎顶高程367m;尾坎后防冲段长度35m,高程360.3m。底孔消力池是由左导墙、中导墙、底坎及护坦围成的四方体结构,底部布置有3纵2横封闭帷幕灌浆及排水交通廊道,护坦顶面高程354.0m,池长187.6m(底孔明槽出口~消力池尾坎),池宽75m,消力池尾坎为连续式,坎顶高程367m;尾坎后防冲段长度35m,高程360.8m。
表、底孔消力池下游的表坎、底坎顶面高程均为367m,机组正常发电尾水位一般为373m左右,低于尾水位6m,检修加高尾坎需大量渣土围堰。同时,表、底孔消力池位于主河床中央,左侧为尾水渠,右侧为升船机航道,正常发电和航运时,若不影响发电和航运,则围堰渣土只有通过船运;若围堰渣土车运,则需升船机航道断航,从右岸航道内横向垫渣,形成临时检修通道,但会影响通航。以上仅有的两种围堰运渣方式,其施工周期均非常长(6个月左右)、成本非常高(单个消力池一般在500万~2000万),而且在仅有的6个月非汛期,很难完成检修。
目前,表、底孔消力池运行状况监测设施仅有量水堰和帷幕后测压管,仅能通过渗漏水量和压力来监测护坦、导墙等混凝土体及止水和封闭帷幕工作情况,而对运行过程中,护坦、导墙及尾坎淤积、冲刷、磨蚀、磨损、冲坑、表面揭顶及水流流态等情况,不能形成实时、有效监测,往往这些缺陷由量变到了质变,才会引起渗漏量异常增大。
通过围堰抽干清淤外观检查难度大、成本高、工期长,而现有监测手段又不能完全满足实时监测需要,故本文将探索研发智能水下机器人,搭载所需清理工具和传感器,通过工作人员实时控制其运动轨迹,在水下所需位置及角度对消力池结构状况进行全面、详细检查,并将检查信息回传处理,还原消力池结构现状,通过后台综合分析,对消力池运行性态做出安全评判,以确定是否进行修理。这样就能及早发现潜在隐患或缺陷,准确鉴定是否需要维修,既能确保消力池运行安全,同时又能避免浪费不必要的围堰抽干修理费用。
2 技术路线
结合消力池检修现实需求按照现场分析、解决方案制定、关键技术突破、系统集成、分析与评估的技术路线进行实施。
(1)在现场分析阶段,以消力池的相关资料为重要依据,整理出系统约束条件,包括环境条件的限制、作业流程的限制等;结合相关行业规范和国内外已有工程案例,提炼出系统需要达到的巡检内容、巡检精度、巡检范围等具体参数;
(2)在解决方案制定阶段,采用讨论会的形式,以现场维护人员和相应技术开发人员进行沟通交流,讨论方案和关键指标,形成消力池巡检解决方案;通过开展技术论证会,邀请行业专家进行技术论证和风险评估。形成具有可实施的解决方案;
(3)在关键技术突破阶段,突破水下运动控制、水下导航定位、水下缺陷检测与识别等问题。在典型场景下提炼出关键技术,总结专利,形成行业壁垒;发表高水平论文,提升行业影响力;
(4)在系统集成阶段,结合实验室环境和消力池现场环境,分别搭建实验,进行子系统测试和综合设备调试和实验,测试设备的可靠性、极限指标以及可操作性。获取消力池缺陷数据;
(5)在分析与评估阶段,利用缺陷数据,进行缺陷量化分析,进行缺陷类型、缺陷尺寸、缺陷深度的量化。结合水工建筑物缺陷成因理论模型,通过数据对比和分析,进行缺陷趋势预测。进而形成消力池健康评估报告,指导现场人员进行维修、维护等运维作业。
3 关键技术方案
消力池水下智能巡检系统的架构如图1所示,分为水面载体和水下机器人两个部分。水下机器人由本体设备、清洗设备、定位设备、检测设备组成;水面载体由显示设备、机器人控制台、电源设备、定位设备组成。
3.1 水下导航定位
精确的导航与定位是水下机器人成功执行水下检测任务的基本要素,由于水下机器人非线性动力学特性及水介质特殊等因素影响,实现水下机器人特定区域内长时间、大范围内精确定位与导航成为一项艰难任务。目前水下导航技术分为惯导、航位推算、声学导航、地球物理导航几类。单一导航方法精度、可靠性都无法满足水下机器人在检测中的需求,因此,将多种导航系统进行组合成为水下机器人导航技术重要发展方向。
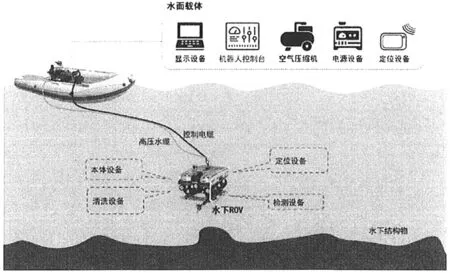
图1 消力池水下智能巡检系统的架构
本系统的定位方案如图2所示,综合采用惯性传感器数据、多普勒计程仪数据、水声定位数据、水深数据等各种导航数据并进行校正,与单独使用一种导航数据相比,组合导航系统可以提升导航精度,增强冗余度,扩大作业范围。

图2 消力池水下智能巡检系统的定位方案
3.2 水下机器人本体运动控制
对于水下机器人运动控制设计来讲,水下机器人动力学本质上是非线性的,并且各个自由度具有强耦合特性;在消力池进行检测作业时,水下机器人需要携带定位设备以及检测设备,这些负载的添加,使机器人自身质量和惯量都发生明显变化;另外,水下作业时,坝下水流作用引起扰动输入,以上诸多因素构成了水下机器人运动控制设计所面临的主要困难——非线性动力学特性、模型的不确定性和难以测量或估计的干扰。水下机器人控制研究的一个重要趋势就是运用H∞控制、模糊控制、神经网络控制、滑模变结构控制等控制方法,实现操作人员对水下机器人进行动操作辅助控制系统或者自主运动控制系统的更准确控制效果。
水下机器人本体采用模块化设计,控制结构采用分层智能控制方法。其中姿态控制主要实现水下机器人姿态估计和反馈控制;轨迹控制主要实现位置估计和轨迹生成;任务规划包括故障诊断和任务规划,如图3所示。

图3 消力池水下智能巡检系统的控制系统
3.3 水下清淤与巡检平台搭建
水下机器人采用模块化、分布式,使用框架式结构,为搭载各种设备提供可靠载体。水下机器人采用浮力块,平衡水下机器人自身重量,达到零浮力。水下机器人控制从底层向上分别为姿态控制、轨迹控制、任务规划三层。针对消力池表面附着物厚度及附着强度,在水下机器人平台上搭载相应工具头进行水下清理,可搭载的工具头包括:清洗铲、清洗刷、高压水射流;若附着物较厚,则可设计履带式水下机器人,搭载液压铲和回收箱,进行水下附着物清理。
3.4 高精度及全覆盖巡检作业
将三维激光引入消力池检测,三维激光扫描原理采用三角测量法,即通过已知激光射线和测量目标点到图像采集传感器的方向角,来计算得到数据空间X、Y、Z点云信息。这些点云数据点相对于质心与旋转轴是对齐的。综合声纳扫描、水下激光三维扫描、高清摄像的优缺点,形成具有层次结构特点的高精度检测方案。采用声纳进行大范围轮廓查看;水下三维激光扫描进行小范围精准点云采集;高清摄像头进行近距离缺陷确认。为了保证水下作业过程全覆盖,将整个消力池底板与导墙划分为10m×10m大小检测单元。在每个网格中,重复进行移动-下潜-清洗-采集-上浮作业。
3.5 缺陷检测与识别
水下机器人检测系统中,目标检测是水下机器人关键技术。水下环境差异对水下作业和目标检测带来了一定困难。特别在低能见度、浑浊水体、杂质水环境中,进行作业和检测是水下应用难点。本系统依赖声纳、高清摄像机、三维激光扫描技术特点,主要综合三种相辅手段来进行目标检测,其中声纳适合对构筑物外轮廓、结构破损、护坦淤积等进行大范围检查,高清摄像机配合辅助光源照明,在清水近距离,高清晰度缺陷观测,三维激光扫描进行小范围精准点云数据采集。
由于水体能见度低,加上水中悬浮物对光波吸收和散射效应,以及水流对摄像头的影响,使得水下图像亮度分布不均匀,冗余信息匮乏,具有噪声大、对比度低、边缘模糊、纹理弱等缺陷。通过带色彩恢复的多尺度视网膜增强算法(MSRCR)对原始获得的水下图像进行实时图像增强,增强后的图像信息有利于人工进行水下环境判断以及缺陷诊断。
3.6 消力池健康评估与决策支持
研究消力池护坦与导墙破坏机理,包括护坦失稳——绝大多数工程的护坦失事属于板块揭底破坏;空蚀——少数工程属于空蚀破坏 ;冲磨——水流中夹带杂物冲刷、磨损、撞击破坏。研究护坦失稳、空蚀、冲磨中的低频、大振幅脉动压力分量对护坦与导墙破坏程度,如图4所示。

图4 消力池护坦脉动上举力时程图
通过数据预处理、图像分析、点云匹配、特征提取、模式识别等计算步骤,综合得到量化缺陷数据,包括缺陷类型、分布、面积与深度。基于表面缺陷特征参数,结合消力池运行水动力条件,建立消力池缺陷风险评价方法。根据巡检数据、监测成果、失稳机理以及老化评估数据,进行消力池结构安全多层次、多目标分析评价,对异常和隐患做物理成因分析,给出系统性综合决策建议。
3.7 技术指标
消力池水下智能巡检系统主要技术指标详见表1。
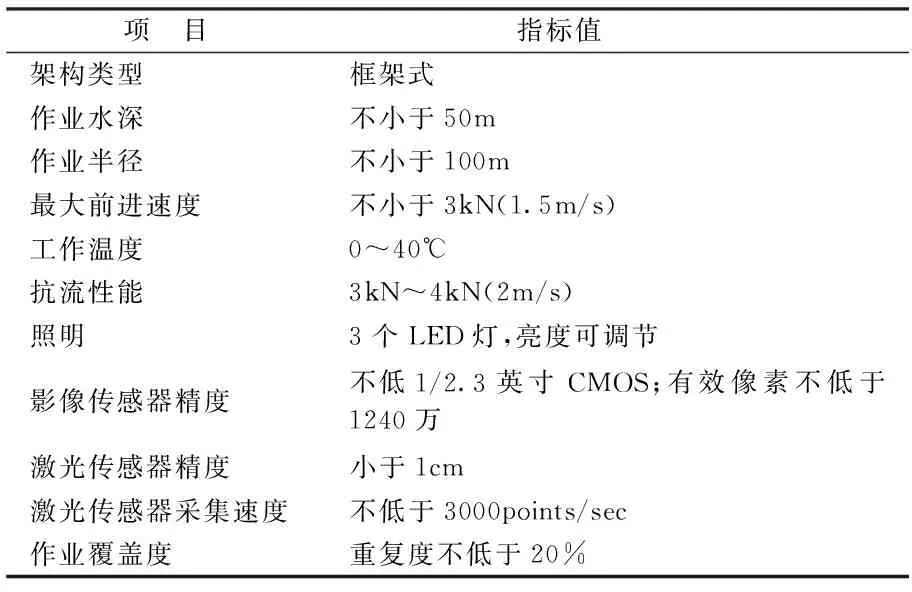
表1 消力池水下智能巡检系统主要技术指标
4 研发目标
针对消力池巡检迫切需求和现有巡检手段局限,采用水下机器人搭载清淤和巡检作业设备,在不排水的条件下,替代人工进行水下作业,获取基于高精度位置信息的底板和消力池检测数据。按照缺陷风险部位、性质及其影响因素相互关系,对各缺陷进行划分归类,建立消力池缺陷识别与健康评价体系,给出系统性综合决策建议。
