亭子口水利枢纽升船机监控系统结构及功能
2018-11-02
(嘉陵江亭子口水利水电开发有限公司,四川 苍溪,628400)
1 亭子口升船机计算机监控系统网络
亭子口水利工程升船机布置在枢纽工程右岸,位于表孔泄洪坝段和右岸非溢流坝段之间,由上游引航道、上闸首、升船机本体段及主体设备、主机房机构、下闸首、下游引航道及供电系统等部分组成,各部分又由多个不同类型的机电设备组成。亭子口水利工程升船机采用钢丝绳卷扬全平衡垂直提升型式,通航规模2×500t级,是由多个运行机构组成的联合体,升船机设备主要包括主体设备、上下闸首设备和上游钢结构浮箱等,各种设备按照一定的程序准确、可靠、灵活、协调地运转,由上位机计算机自动控制系统承担升船机运行流程的监视控制和运行管理。
亭子口升船机计算机监控系统采用分布式双层结构,主要由主控级和现地控制级组成,集中控制功能和现地控制功能通过网络信息交换。计算机监控系统主控级由两台操作员工作站、一台网络服务器、一台工程师工作站、一台图像监控工作站、多媒体服务器(广播、工业电视监视、消防安保)、两台打印机、一套工业以太网局域网络成套设备、一套并联冗余在线式不间断电源装置等组成。主控级双操作员工作站、工程师工作站和图像监控工作站、网络服务器之间采用1000Mbps工业以太网连接,组成主控级信息网络,实现主控级各计算机之间的数据交换和资源共享。计算机监控系统网络结构如图1所示。
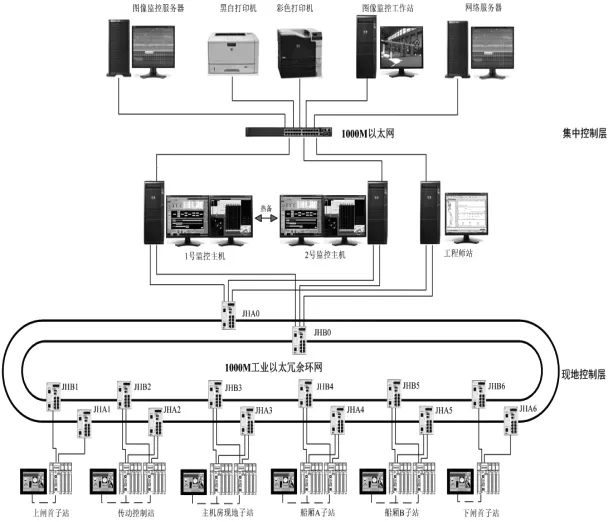
图1 亭子口升船机计算机监控系统网络结构
2 监控控制功能
2.1 上位机集控功能
升船机上位机是升船机的枢纽中心,负责整个升船机的实时监视、流程控制、单机构调试及通航指挥,具有自动控制、人机对话、实时数据处理、升船机系统时钟同步、故障报警及应对处理、历史数据管理、多媒体管理、本地网络和网际通信等功能。上位机监控系统能迅速有效地对升船机被控对象实时安全监视、实时流程控制和单机构调试控制。
主控级监控系统能实现数据采集和处理、升船机实时动态运行屏幕显示、事件顺序记录、事故处理及恢复操作指导、数据通信、键盘和鼠标操作、系统状态自诊断、实时数据库管理、历史数据库管理、记录及历史报表打印、通航指挥、工业电视监视、系统设备运行维护管理、软件开发及培训的功能。
主控级监控系统功能分以下几大类:
(1)运行控制功能;
(2)数据采集功能;
(3)数据处理功能;
(4)人机接口与画面显示功能;
(5)OA文档与报表打印功能;
(6)系统诊断与报警功能;
(7)运行管理与操作指导功能;
(8)系统通信接口功能。
2.2 现地级LCU功能
现地控制子站能实现对现地传感器的数据采集和处理、控制对象状态的现地实时指示灯显示和数码显示、专业键盘及按钮开关操作、事件顺序记录、事故报警及应对处理、故障确认及恢复操作、现地网络数据通信、现地设备状态诊断和系统状态自诊断、通航信号灯控制等功能。
3 上位集控系统软件
3.1 上位机监控软件结构
上位监控软件包括近一百幅画面,完成对上闸首控制子站、主机房控制子站、传动控制站、承船厢A泵站控制子站、承船厢B泵站控制子站和下闸首控制子站等PLC子站数据采集和控制。上位监控软件主要画面构成见图2所示。输入、输出各类信号共3600多点。为了操作员监视前端设备的状况,程序将各站重要的信号均连续采集上来,并以图形、文字、曲线、表格等形式实时显示,其中需要的则可存入数据库以供记录和存档。重要的报警和故障信号除自动启动相应的保护动作,还以清晰的图形闪烁和声音信号提醒操作员以便作紧急处理。

图2 亭子口升船机监控软件主要画面构成
3.2 上位集控系统软件功能
集控系统软件严格按照亭子口升船机主控级功能要求、自动运行流程和各现场设备间的闭锁保护条件,完成对升船机现场设备状态和运行过程的可靠和有效的监控。软件的主要功能有:
●数据采集与处理;
●升船机运行全过程自动流程控制;
●升船机运行分步流程控制;
●单机构调试控制;
●升船机运行工艺的逻辑运算与处理;
●升船机状态检测和故障诊断;
●升船机实时动态运行屏幕显示;
●双机热备;
●事故处理及恢复操作指导;
●系统状态自诊断;
●系统时钟同步;
●键盘和鼠标操作;
●系统设备运行维护管理;
●网络通信;
●故障保护流程(紧急关门和船厢运行到安全位置)控制;
●数据库管理;
●升船机数据报表处理与打印;
●记录及历史报表打印;
●各控制站的程序组态与开发维护;
●升船机运行全过程图形模拟仿真显示;
●升船机整体运行仿真;
●应用软件开发;
●运行管理人员培训等。
监控主机的监控程序实时采集升船机现场的状态和数据,通过监视器显示和供数据库存档,操作员根据升船机运行流程在适当时刻发布控制命令,由PLC及现地模块再配合检测的状态和数据,执行相应的动作,完成升船机运行,在PLC接到命令后,给出反馈信号,若在预定时间内收不到正确的反馈信号,监控程序给出清晰的报警信号供操作员进行检查和进一步决策。需要时经操作站执行暂停、恢复运行或对单个设备进行操作。
3.3 上位集控系统监控的内容
上位集控采集升船机现地控制站的设备运行状态等信息,主要监控的内容有:
●各子站故障、报警信号;
●各子站PLC运行状态信号;
●上闸首工作门上、下极限位置信号、开度值;
●上闸首卧倒门上、下极限位置信号、开度值;
●上游水位值;
●上游渡槽船舶探测信号;
●安全制动器松闸到位信号、闸皮磨损信号;
●安全制动系统液压泵站启、停信号,压力值;
●工作制动器松闸到位信号、闸皮磨损信号;
●工作制动系统液压泵站启、停信号,压力值;
●润滑油泵站启、停信号;
●同步轴扭矩值;
●主拖动电机电源电压、工作电流及转速值;
●船厢上、下行程;
●船厢至主机房层底面距离;
●船厢各泵站启、停信号;
●船厢上、下游端防撞装置位置信号;
●船厢上、下游端防撞装置行程;
●船厢上、下游端门开、关位置信号,开度值;
●船厢顶紧压力值,前进到位和回退到位信号;
●船厢夹紧压力值,前进到位和回退到位信号;
●船厢上、下游端密封框位置信号、压力值;
●船厢船舶探测信号;
●船厢静态调平水平量;
●船厢动态水平量;
●船厢上、下游端厢头间隙水深值;
●船厢水深、水平值;
●船厢上、下游减速及停靠位置信号;
●船厢上、下锁定位置信号;
●下闸首工作大门上、下极限位置信号、开度值;
●下闸首卧倒门上、下极限位置信号、开度值;
●下游水位值;
●下游引航道船舶检测信号;
●网络诊断及双网切换信号。
4 故障及分类处理
亭子口升船机监控系统故障按照严重程度分为四个级别:一类故障、二类故障、三类故障和四类故障。其中,一类故障最严重,必须马上紧急停机;二类故障次于一类故障,必须马上快速停机;三类故障次于二类故障,需要立即采取正常速度停机;四类故障可以坚持运行完本次运船流程后再做维护处理。
一类故障——紧急停机,卷扬传动系统整流切除,工作制动器调压上闸,安全制动器延时上闸;信号传输与处理采用硬接线与PLC控制并行进行;同时声光报警;
二类故障——快速停机,卷扬传动系统以0.04m/s2减速,接近零速时工作制动器先上闸,安全制动器延时上闸;同时声光报警;
三类故障——正常停机,卷扬传动系统以0.01m/s2减速,接近零速时工作制动器先上闸,安全制动器延时上闸;同时声光报警;
四类故障——只声光报警。
上位集控系统故障分类如表1所示。
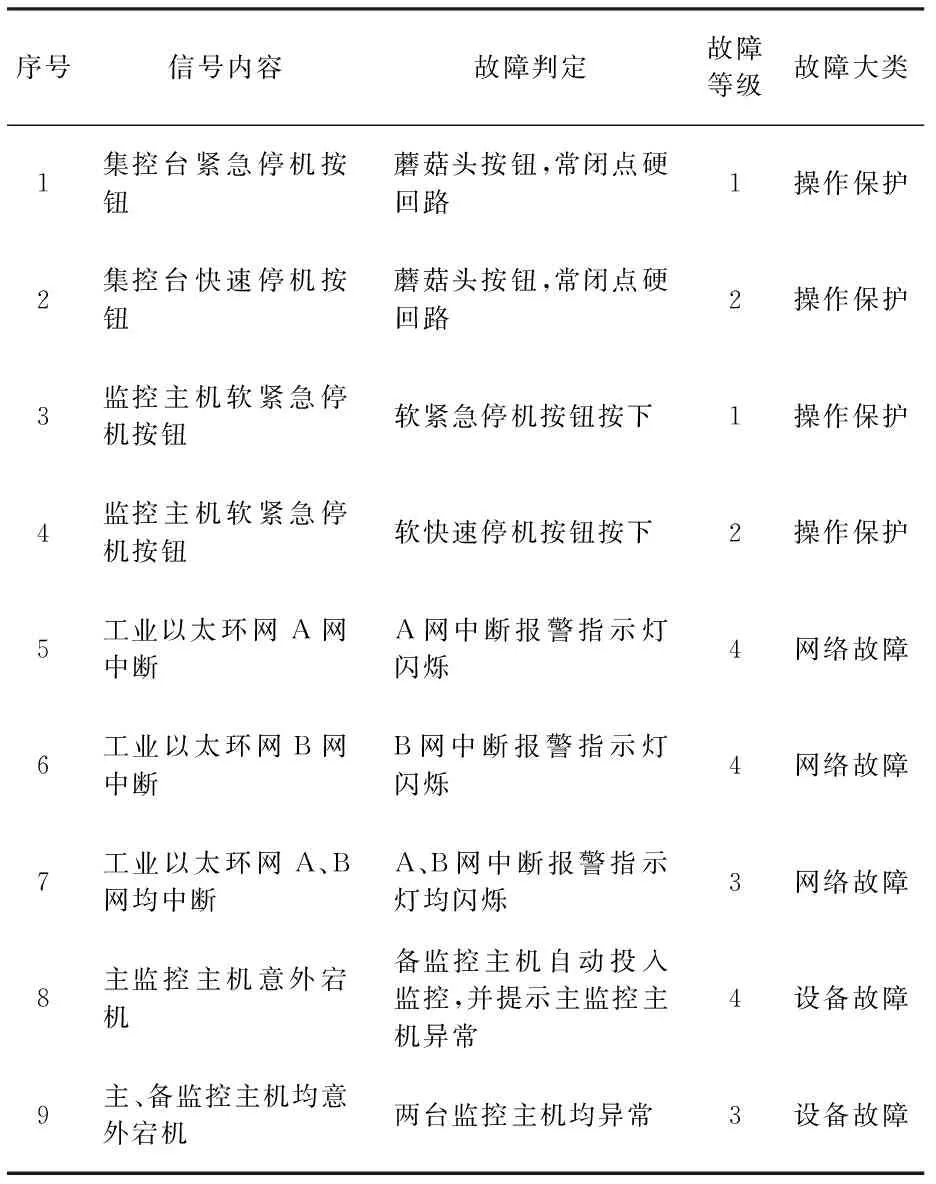
表1 亭子口上位集控系统故障分类
5 控制方式
(1)计算机监控系统正常时,升船机可自动完成上行或下行运行过程,亦可进行分步流程控制和单步操作运行;
(2)计算机监控系统的主控级有故障,但至少有一台微机正常工作时,系统仍能继续维持正常运行过程和单步运行操作;
(3)主控级检修时,可在各系统的现场控制子站人工按规定顺序进行单机操作。此时顺序闭锁仍能维持升船机安全运行。
升船机电气系统控制方式定义为:集控、现地自动、现地手动控制方式。
(1)集控控制方式:上位机和所有子站控制方式选择为自动控制,整个升船机受控于上位机集控,各子站接受上位命令,经校核后响应,根据升船机流程,自动完成升船机的全过程控制。升船机上位集中控制系统负责对升船机设备进行远方监测与控制,控制方式分为上位全自动控制、上位单步控制和上位单机构控制三种方式。其中,上位全自动控制和上位单步控制方式为升船机正常运行控制方式,当升船机发生故障不能按照流程正常运行时,可以切换到上位单机构控制方式,实现远方手动控制升船机设备,同时,上位单机构控制方式也可以用于调试阶段;
(2)现地自动控制方式:各系统子站在现地方式运行时,各子站可以通过人机界面或控制面板上的操作组件,完成升船机的流程控制;
(3)现地手动控制方式:在子站调试或检修阶段,方式选择开关设为手动控制,在不影响升船机系统安全和符合设备工艺要求的情况下,控制单一设备,实现单步检修、调试过程。
急停按钮优先现地子站,具有最高控制权限,不受控制方式限制。
6 复杂的流程控制、传动技术
亭子口升船机系统运行涉及设备数量、检测信号类型及数量繁多,正常运行流程及故障保护流程复杂。根据亭子口升船机工况,设计了升船机初始化流程、自动上行流程、自动下行流程、单步上行流程、单步下行流程、下班停运流程和故障保护流程,保证了系统运行的流畅性、灵活性,同时为系统的安全运行提供了保障。亭子口升船机的通航运行工艺流程是一个典型的工业过程控制流程,具有控制流程的逻辑性强、机构动作的步序特性突出、各种动作闭锁条件结合紧密等特点。
在船厢升降时,工作制动器松闸前,8台主电机会先预加力矩,根据船厢均衡缸上腔压力以及船厢水深、船厢入水深度,判定不平衡力方向,动态力矩控制,协调制动器松闸时机,解决船厢启动平稳性问题。
7 结语
目前亭子口升船机已进入调试阶段,各项控制功能齐备,安全保障机构可靠;作为嘉陵江高等级航道中的控制性工程,运行条件要求高、技术复杂,因此升船机系统、尤其是检测系统的运行稳定性及可靠性需不断进行现场跟进、完善,满足安全通航需求。
