基于三维激光扫描技术的矿区边坡变形监测研究
2018-11-02王海珍
张 亚,王海珍,王 涛
(1. 陕西铁路工程职业技术学院,陕西 渭南 714099; 2. 西安思格玛测绘仪器有限公司,陕西 西安 710054)
0 前 言
近年来,露天矿区的边坡开挖越来越高,开挖的范围越来越广,开挖的速度越来越快,这对矿区边坡的变形监测提出了更高的要求[1]。传统监测手段主要是依靠人工定期进行单点监测,如全站仪、GPS、水准仪等,这些手段只能局限于对边坡进行单点监测,无法对边坡的整体变形进行全面评估[2]。三维激光扫描技术的出现以其不接触性、穿透性、主动性,高密度、高精度、实时性等特点改变了这一现状,使得越来越多的研究者逐渐尝试着应用到变形监测领域。袁长征等[3]提出一种应用三维激光扫描技术研究地铁隧道变形的方法,通过两期点云数据的建模提取同一位置处地铁隧道的断面进行对比分析,得到地铁隧道变形情况;李彦琛[4]验证了三维激光扫描技术能够反映煤矿沉陷区的真实情况,且监测准确,并从测量环境、扫描距离点、远距离波动等影响因素对三维激光扫描技术的误差来源进行分析。基于此,本文运用拓普康公司的GLS-2000三维激光扫描仪对某矿区的边坡进行外业数据采集,采用Scan Master、Geomagic Studio软件进行内业数据处理,提取滑坡监测桩数据与同期的全站仪、水准仪数据进行对比分析,然后通过两期边坡模型进行叠加分析得到边坡整体变形情况,并对三维激光扫描技术应用边坡变形监测的误差进行分析。
1 三维激光扫描技术原理介绍
三维激光扫描技术又称为实景复制技术[5],其载体是三维激光扫描仪,三维激光扫描仪是一个集多种高新技术于一体的非接触主动式测量系统,由电机、数据记录器、激光测距和可以引导激光以均匀角速度扫描的反射棱镜组成,在仪器内部激光测距系统发射激光脉冲扫描被测物体,经物体表面后沿同样路线反射回仪器,即可得到目标点P与三维激光扫描仪之间的斜距,同时融合激光信号和彩色相片得到P点的颜色信息,再参考转动的水平和垂直角度,就可获得被测边坡表面大量密集点的反射率信息和相对空间三维坐标信息,如图1所示。
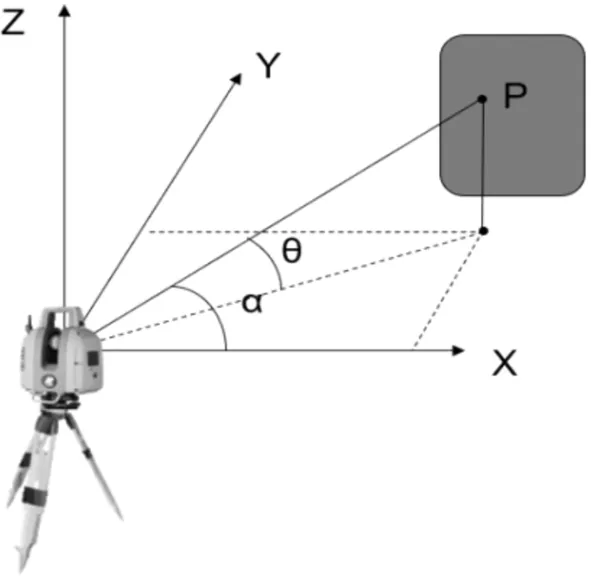
图1 三维激光扫描技术原理
被测边坡点三维坐标计算公式如下:
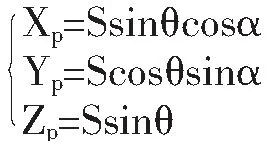
2 边坡监测数据采集与处理
2.1 研究区域介绍
本次选择某矿区边坡作为研究对象,该边坡高度为65 m,东西宽约为302 m,倾角为39(°),总体比较稳定,但是受持续开采的影响,地表先后出现了变形、开裂和沉陷,特别是东面边坡,受采动影响非常大,虽然对边坡设置了预应力抗滑桩、锚喷支护等工程加固措施,该边坡还是会有一定的变形,需对该边坡的变化发展趋势进行监测,以确定该边坡的稳定性。
2.2 边坡数据采集
本次研究采用拓普康GLS-2000三维激光扫描仪、徕卡1201+全站仪和徕卡DNA03水准仪,分别于2017年1月和2017年5月对变形边坡进行两次外业数据采集。
每次扫描的时候把扫描仪对中、整平架设于已有的监测基准点上,后视邻近的其他基准点上的标靶进行扫描仪的测站定向,然后设定扫描范围、扫描密度,对该站范围内的边坡扫描。这种基于测站后视的定向方式可以简单、快速、高精度对不同测站的扫描数据进行拼接。
使用徕卡1201+全站仪对边坡上的监测桩进行水平位移监测,徕卡DNA03水准仪对边坡上的监测桩进行沉降监测,这两种仪器的使用主要是通过传统的方法对边坡进行高精度的监测,以提供本次研究中边坡各监测桩真实的变形数据。
2.3 边坡扫描数据处理
2.3.1 点云数据拼接
边坡的地形起伏且有遮挡,而扫描仪的扫描视场有限,没有办法一次性把边坡的所有点云数据都扫描完毕,要获取边坡的整体点云数据,需要根据现场实际情况分角度、位置进行多次扫描。扫描仪在不同角度对边坡进行了多次扫描,此时对于同一个边坡位置对应不同的测站其坐标值也不同,为了得到边坡表面完整的点云数据,必须对不同测站获得的数据进行拼接。本次采用的拓普康三维激光扫描仪扫描了四站,该仪器具有测站后视定向功能,通过这种方式扫描的数据在Scan Master 软件中通过基于测站的形式完成数据的拼接。
2.3.2 点云数据去噪
在数据采集过程中,由于地表植被、树木、周边设备、边坡表面粗糙等因素,非常容易产生一些不稳定的点和错误的点,这些统称为噪声点,噪声点会影响后续数据处理速度以及在三维建模的时候会引起模型失真,所以必须降低或消除噪声点,即去噪[6]。对于明显的噪声点采用手工方式直接予以删除,对于靠近地面的噪声点通过Geomagic Studio软件中的降噪功能,分离出噪声点,然后将噪声点过滤。
2.3.3 数据重采样
在设置扫描密度的时候一般设置的较小,这样可以较为真实的反应边坡起伏变化情况,但是这也导致获得的点云数据量非常大,对计算机处理扫描点云数据的速度产生影响,不利于后续的边坡三维建模,所以要对去噪后的点云数据进行重采样。在Geomagic Studio软件中采用曲率采样的方法对边坡进行重采样[7],这样尽可能的较为真实的反应边坡表面的起伏、变化。
2.3.4 边坡三维建模
对边坡的原始点云数据经上述处理之后,得到边坡表面的点云数据,但是边坡表面有些地面被遮挡,就会造成遮挡部分的数据缺失,即数据空洞,如果不对数据空洞进行修补,在三维建模的时候会造成表面失真,本次是采用Geomagic Studio软件中的基于曲率的填充方式来进行数据空洞区中的点云数据进行修补的,修补完成后进行边坡三维建模,获得边坡两期的三维模型(如图2所示),并将两期的模型进行叠加分析。
3 边坡监测数据分析
为了能准确的反应边坡的变形情况,同时也为了研究三维激光扫描技术应用边坡变形监测的可行性,本文在对两期所采集的点云数据预处理的基础上,经过后续内业的数据处理分别提取了边坡两期的监测点变形情况、整体特征变形情况,并从点、面两个角度对边坡的变形监测进行对比分析,然后根据地面点和监测桩不同方法的较差对三维激光扫描技术的误差进行分析[8]。
3.1 监测点变形量分析
根据三维激光扫描得到的点云数据,本研究中提取了两类特征点:一类是在边坡变形监测中设置的监测桩,监测桩是在边坡表面0.6 m高的钢筋混凝土墩,在其顶面的中心设置监测点。根据软件三维建模的功能,拟合出变形监测桩的模型,提取到模型中心的三维坐标,由两期的模型中心三维坐标差值即得三维激光扫描方法的监测桩变形数据,共8个点;另一类是根据建立的模型提取得到监测桩旁边的地面点,共8个点,这些点在监测桩旁边,其变形量应与监测桩一致。
表1是三维激光扫描所提取的监测桩和地面点数据与同期的全站仪得到的水平位移监测数据对比情况。表2是三维激光扫描所提取的监测桩和地面点数据与同期精密水准仪得到的沉降监测数据的对比情况。根据表1和表2、图3和图4的对比分析,可以得到2017年1月和5月使用两类监测方法所得到的边坡的水平位移、沉降监测基本上保持一致。从监测点变形量对比分析来看,三维激光扫描技术得到的变形量精度较高,可靠性非常好,能真实的反映出边坡的变形情况。
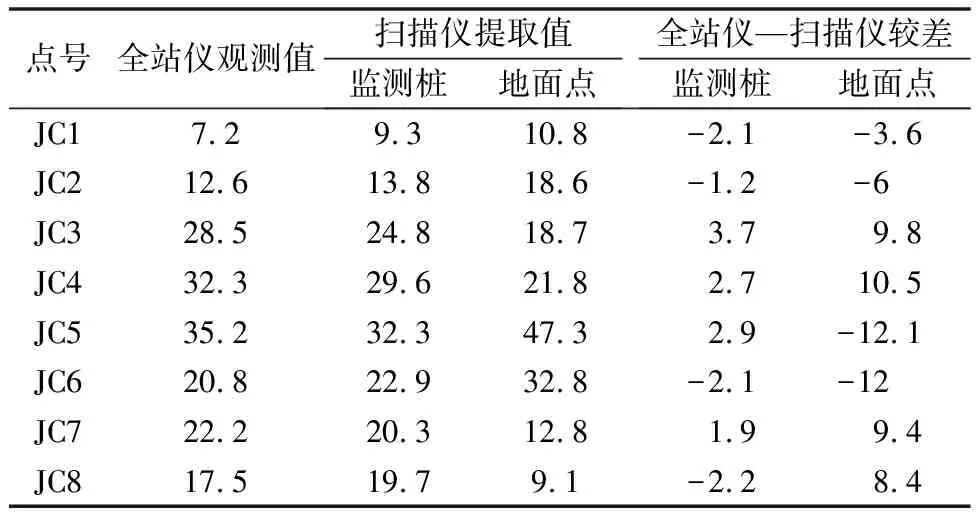
表1 两期水平位移监测结果精度分析
3.2 整体特征变形分析
三维激光扫描技术最大的特点是能够扫描被测物体表面的三维点云数据,因此可以用于获取被测物体表面高精度三维模型[9],应用到边坡变形监测当中就可以对边坡体做全面、整体的点云数据采集,从整体对变形体进行分析。
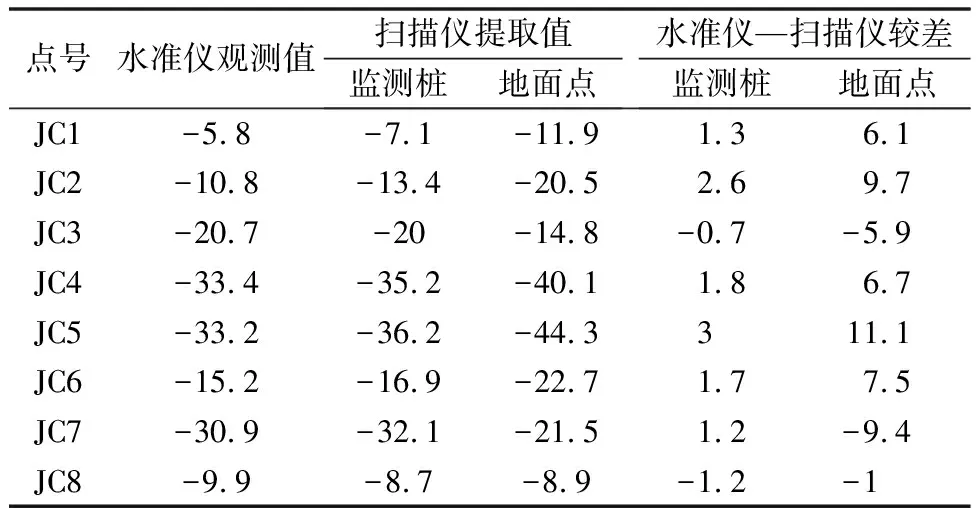
表2 两期沉降监测结果精度分析
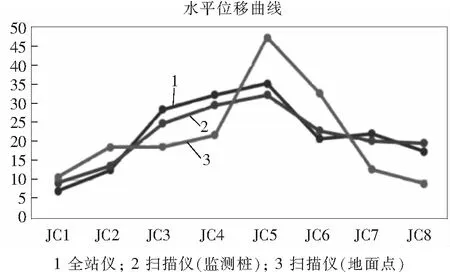
图3 全站仪测量与三维激光测量水平位移曲线比较
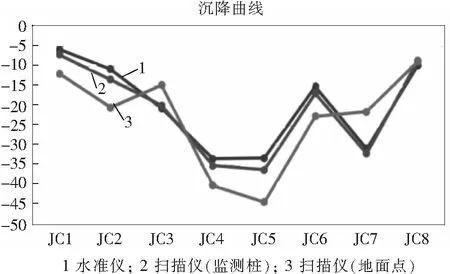
图4 水准仪测量与三维激光测量沉降曲线比较
图5是以第1期模型为基准,把两期模型叠加所形成的基于两期监测对象相同部分变形情况的假彩色模型,图中不同的颜色显示出边坡整体变形的情况。根据整体变形假彩色模型所得到的变形趋势和全站仪、水准仪、扫描仪得到的变形趋势基本一致,能反映出边坡变形的情况,但精度有所欠缺。
3.3 三维激光扫描技术误差分析
由表1、 2中全站仪、水准仪和扫描仪的较差以及图3、4中地面点曲线与监测桩曲线我们可以看到,提取出的地面点的曲线虽然和监测点曲线基本一致,但是地面点的较差大于监测桩的较差,这说明三维扫描技术的精度与传统监测方法的精度还有一定的差距,这种差距主要受三维激光扫描技术在边坡变形监测过程中数据采集精度的影响,其中主要包括扫描目标反射特性的影响、地面植被以及其他物体遮挡的影响、扫描距离及扫描密度的影响等。
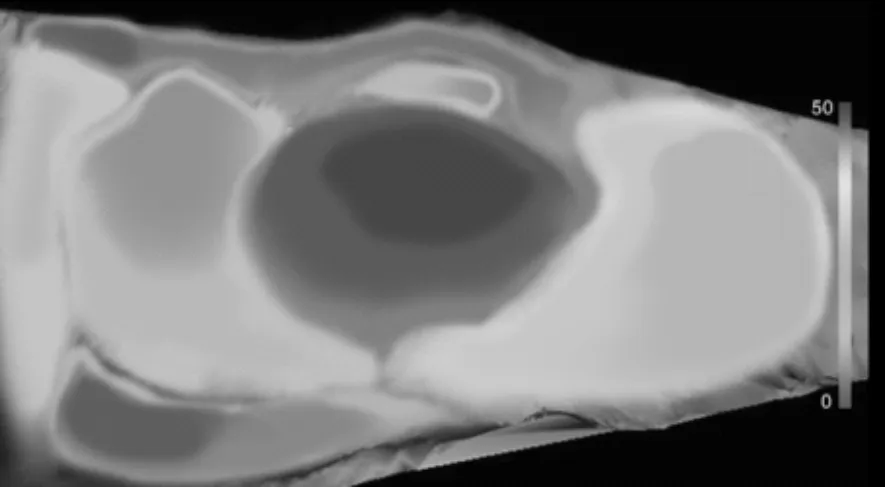
图5 边坡整体变形假彩色图
扫描目标反射特性的影响主要因为扫描仪测距时依赖于边坡表面反射回的激光信号,这样边坡表面反射强弱的差异就能导致激光测距产生误差,反射强弱主要受边坡的材质、粗糙程度、边坡表面与激光夹角等影响[10]。地面植被以及其他物体遮挡的影响在去噪过程中能去除大部分植被的噪声点,但是还有个别噪声点难以去除,影响建模精度,物体的遮挡引起扫描空洞,虽说后续进行了填补,但填补的数据可能与实际数据存在偏差,同样影响精度。扫描距离和扫描密度的影响主要是随着扫描距离的增加点云扫描的密度会逐渐降低,点云扫描密度的降低使得边坡表面点云测量精度降低[11],这会导致建立的三维模型的精度降低。
4 结 语
从本次的研究数据成果分析来看,三维激光扫描技术应用于边坡变形监测虽然还有一些不足:扫描距离有限、噪声点较多、数据空洞等,但是其在边坡变形监测可以快速、准确的获取海量点云数据,建立三维模型,得到点、面的变形监测结果,直观简洁的显示边坡变形量、变形区域,同时弥补了传统单点监测中的整体变形特征不足的情况,极大的提高了监测的工作效率。因此,随着三维激光扫描技术的不断改进和仪器测量精度的提高,这项技术在边坡变形监测中将会发挥越来越大的作用。
