文物安全箱填充物的切割线自动测定方法
2018-11-02宋月婷郑顺义王晓南段志鑫
宋月婷,郑顺义,王晓南,段志鑫
(1. 武汉大学遥感信息工程学院,湖北 武汉 430079; 2. 武汉中观自动化科技有限公司,湖北 武汉 430079;3. 中国矿业大学环境与测绘学院,江苏 徐州 221116)
近年来,随着图像处理和计算机视觉技术的发展,众多学者对基于图像的边界和轮廓边界检测算法进行了大量的研究,并提出了区域生长法[1]、边缘检测算子检测[2-3]、基于贝叶斯框架的轮廓检测[4]及基于机器深度学习的边缘检测[5]等较为成熟的自动化检测算法,这些算法广泛地应用于工业零件轮廓提取与优化[6]、医学CT影像分析[7-8]等方面。在基于图像的工业切割线自动化提取方面,一些学者也作了相应的研究。Lu等[9]提出基于实时计算机视觉系统的切割线定位和缺陷检测算法,提取了灰度图中的最强灰度点作为切割线。郭宝云等[10]通过附加圆、直线相切等几何约束条件对零件轮廓线进行多特征提取,并获取零件轮廓线的准确参数。Wang等[11]运用灰度信息对文物进行边缘检测,使用自主开发的Delphi程序获取图像轮廓数据,并使用CAD软件将数据导出为贝塞尔曲线。Fan等[12]提出一种基于紧凑形状先验信息的对象切割方法,试验证明该方法可以有效地应用于牙科治疗等众多工业模型制作领域。上述方法均具有一定的实用性,但并不具备广泛的适用性。针对文物轮廓复杂、不宜移动及手动测量等特点,本文提出一种基于计算机视觉的文物安全箱填充物切割线自动测定方法,可以有效地解决切割线获取困难的问题。
1 切割线自动测定方法
1.1 图像采集与预处理
图像采集是使用相机拍摄待测物体影像的过程,本文选用尼康的长焦镜头(70~300 mm)拍摄。将物体置于色彩反差较大的环境中,并在物体周围均匀布设不少于4个控制点。拍摄影像时,摄影距离大于2 m,正对物体拍摄,使物体位于图像的中心位置。拍摄得到的影像如图1所示。
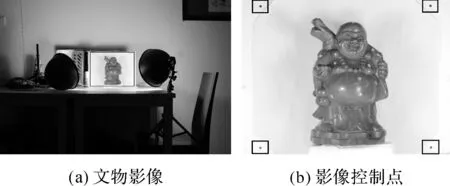
图1 影像采集
图1(a)中的矩形框标明了图像处理时截取的目标区域,图1(b)中的4个矩形框标明了影像控制点。利用以下畸变校正模型对目标区域的影像进行畸变校正。设以左下角像素中心为原点的原始影像点坐标为P(x,y),相机的像主点坐标为(x0,y0),影像点到像主点的距离为r,焦距为f,径向畸变参数为{k1,k2,k3,k4},切向畸变参数为{p1,p2},比例尺不一致系数为a,不正交系数为b,影像点中心化坐标为P′(x′,y′),影像点畸变量为ΔP(Δx,Δy),影像点去畸变坐标为Pu(xu,yu),则有
(1)
(2)
(3)
(4)
由于本文使用长焦镜头进行拍摄,而且影像中心区域的畸变通常小于影像边缘处的畸变,因此选取中心区域的影像作为目标区域在一定程度上抑制了影像的畸变。本文对目标区域的最大畸变量进行了测定:首先依据式(1)—式(3)计算目标区域中所有像素的畸变量;然后取目标区域内像方畸变量绝对值的最大值Δlmax;最后依据式(5)得出该点的像素畸变量对应的物方畸变量ΔLmax
ΔLmax=Δlmax/f·D
(5)
试验时,设置摄影距离D为3 m,采用焦距为200 mm的长焦镜头对畸变情况进行测定。经测定,未进行影像畸变校正的目标区域像方畸变量最大值为0.18个像素,物方畸变量最大值为0.013 mm。当用户所需的精度低于该精度时,无需对影像进行畸变校正,可以简化切割线的测定流程。
此外,本文对图像进行了灰度化和二值化处理,使待测物体的轮廓清晰,易于轮廓提取。
随着高等教育的不断改革,高校也更注重对学生综合素质的培养。而实验课的教学是高校对学生综合素质培养必不可少的课程之一,现如今各个高校均配有实验室,对实验设备要求也越来越高,都希望采购先进的实验仪器设备来让学生进行体验。而学生通过一次次的实验能够深刻地了解理论知识,锻炼自己的动手能力,也能够通过实验进行创新,所以实验教学仪器在实验教学中发挥着重要作用。也可以说没有实验仪器的实验课程是无法开展的。
1.2 轮廓提取
轮廓提取主要分为边界提取和边界跟踪[13]。边界提取是通过保留图像灰度变化率最大的区域,同时去除其他无关信息来得到物体边界的图像。而边界跟踪是按照一定的顺序找出待测物体的外边界,并得出该物体所有外边界点的坐标。
本文借助数学形态学(mathematical morphology)中的腐蚀(erosion)来实现边界的提取。即采用某种结构元素对二值图像进行腐蚀,使得八邻域都有黑色像素的内部点被保留下来,再用二值图像与腐蚀后的图像相减得到物体边界。
边界提取得到的图像中包含所有灰度变化率较大的边界,噪声较多,而且该边界不具有位置信息。因此,需要对目标边界进行跟踪,得到含有位置信息的目标边界。
边界跟踪可以依次记录下目标边界像素的位置信息。首先,按照一定的规则找到目标物体的一个边界像素,并以此像素作为边界跟踪的起点;然后,根据某种确定的顺序(如顺时针或逆时针)跟踪目标物体边界的其余像素;最后,当跟踪到与起点重合的像素时,停止跟踪,完成整个边界的跟踪。
轮廓提取的原图像,过程图像及结果图像如图2 所示。从图中可以看出,本文的方法可以有效、准确地提取出物体的轮廓信息。
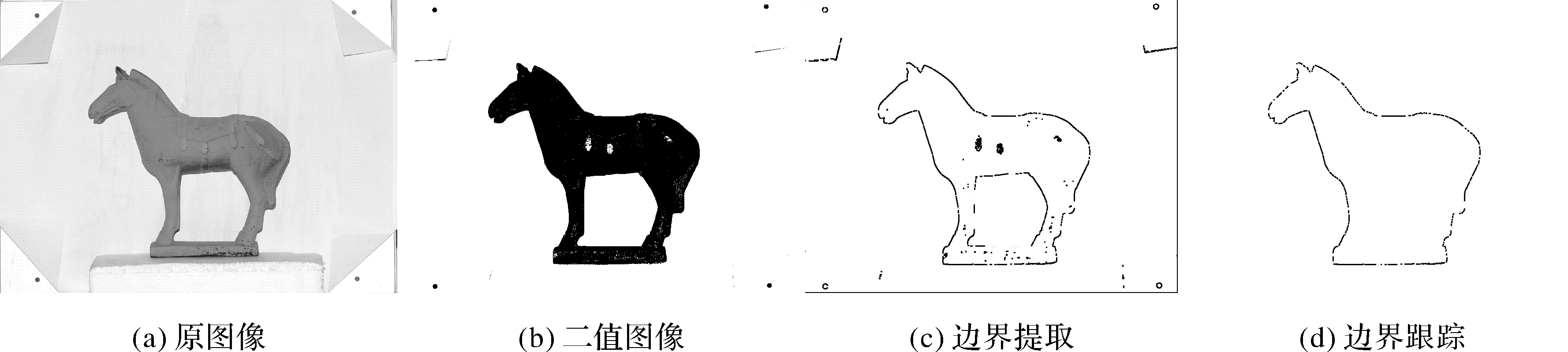
图2 轮廓提取
1.3 单应变换
由于轮廓提取的结果仅适合像方空间中的运算,不适合描述和量测实际物体。因此,本文运用单应变换矩阵[14]来建立像方空间与物方空间的对应关系。首先,从图像中提取4个圆形控制点,并依据式(6)建立控制点圆心的图像坐标及其物方坐标的对应关系
(6)
式中,(xC,yC)为控制点圆心的图像坐标;(XC,YC)为控制点圆心的物方坐标;H矩阵为单应变换矩阵,其中h11、h12、…、h32为H矩阵的矩阵元素。求得单应变换矩阵后,可以利用式(7)计算得到所有轮廓点像方坐标(x,y)所对应的物方坐标(X,Y)为
(7)
单应变换得到的轮廓点坐标与实际的轮廓点坐标之间存在的投影误差如图3所示。设物体轮廓上的任意一点与主光轴的真实距离为L,单应变换得到的距离为L′,摄影距离为D,物体与背景平面之间的距离为d。根据式(8)可以求得单应变换的投影误差ΔL。
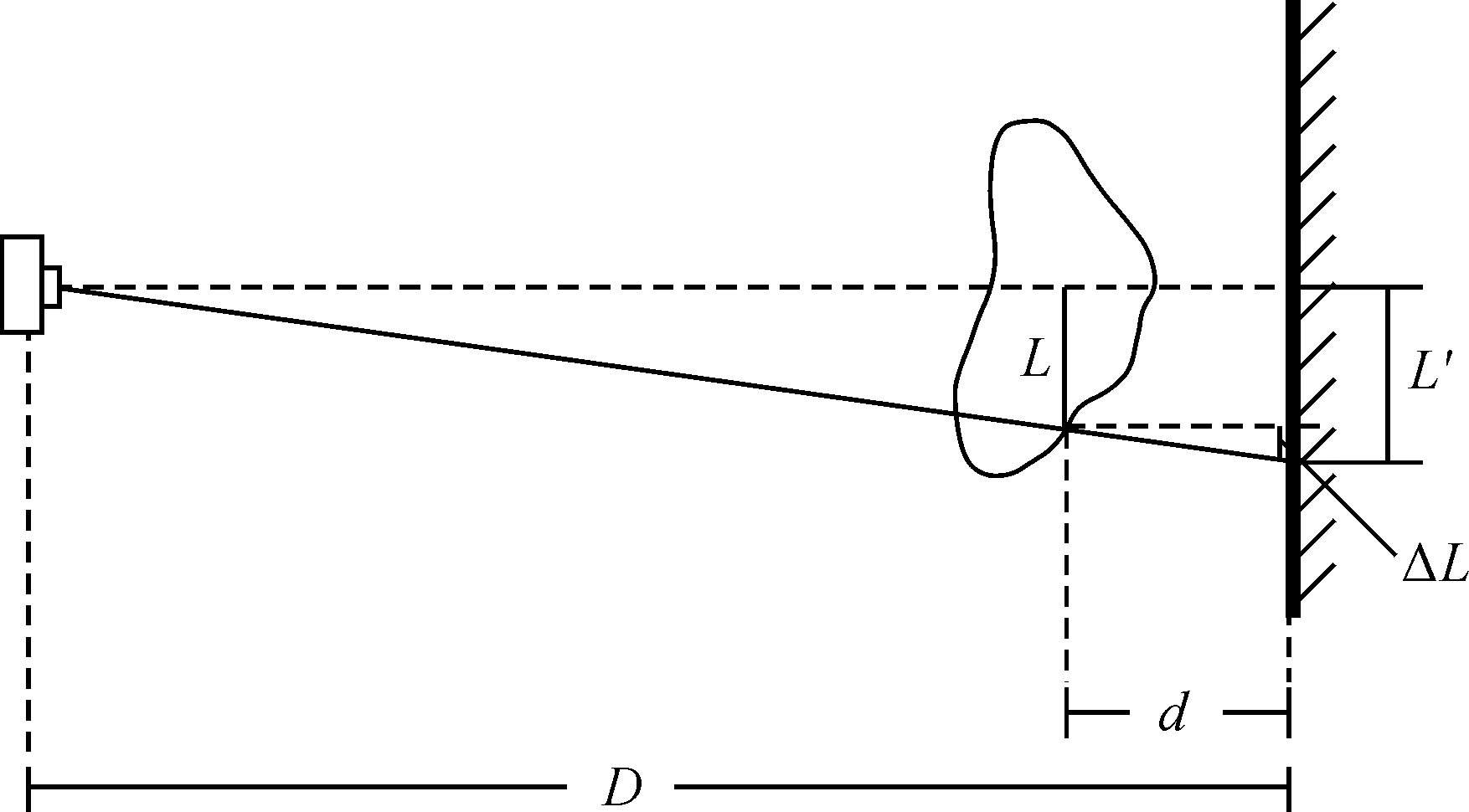
图3 单应变换投影误差
(8)
通过计算所有轮廓点的投影误差,并根据其投影误差和所需的缝隙宽度可以对轮廓线进行精确的定量缩放。
1.4 定量缩放
实现单应变换后,轮廓信息已经可以用于描述和量测研究对象,但是还需要对轮廓线进行修饰和完善,使切割线更加圆滑和准确,才能满足生产加工要求。
在进行轮廓线定量缩放之前,往往需要删除局部凹陷点(或局部凸起点),这是为了弱化轮廓内部的尖角,并防止在进行轮廓点法向收缩时造成局部点位交叉,使轮廓变形。本文提出一种基于向量几何删除局部凹陷点(或局部凸起点)的方法。设局部3个点的坐标分别为Pi-1(Xi-1,Yi-1)、Pi(Xi,Yi)、Pi+1(Xi+1,Yi+1),则其向量积可以表示为

(Xi+1-Xi)·(Yi-Yi-1)
(9)
根据向量积的几何意义,其正负代表该向量的方向。本文以轮廓定量扩充为例,删除局部凹陷点。如图4所示,沿顺时针方向判断轮廓点是否为局部凹陷点。当该点是局部凹陷点时,向量积垂直于平面向外,此时向量积的符号为负;而当该点不是局部凹陷点时,向量积垂直于平面向里,此时向量积的符号为正。因此,可以根据轮廓点向量积的符号来判断局部凹陷点是否存在,并删除局部凹陷点。此过程可以循环进行、多次进行,直至向量积的模大于某一阈值。此时,可将凹陷点作为全局凹陷点予以保留。
轮廓线定量缩放是根据投影误差和所需的缝隙宽度对轮廓线进行精确的缩放。轮廓线定量缩放主要包括以下4个步骤:
(1) 求取每一个轮廓点的法向量Ni(NXi,NYi)
(10)
图4 删除局部凹陷点
(11)
(3) 缩放量的计算:假设所需的缝隙宽度为w,以mm为单位,已知该点的投影误差为ΔLi,以mm为单位,可计算缩放量为(以mm为单位)
k=w-ΔLi
(12)
(4) 法向定量缩放:轮廓上任意一点Pi(Xi,Yi)缩放k后得到的坐标Pexpi(Xexpi,Yexpi)为
(13)
1.5 曲线拟合
机械设备切割物体时,往往需要曲线参数来控制切割过程的快速准确进行,但是提取得到的轮廓却是由大量数据点组成的,这会使轮廓线的编辑过程复杂,加工出的模型表面较粗糙。本文采用改进的样条曲线拟合方法[15]对轮廓点进行拟合,该方法可以使样条曲线通过所有型值点,具有更好的贴合度。
三次B样条曲线具有三阶连续性且曲线形状易于控制,本文选取该曲线进行拟合并且通过重合曲线末尾的型值点与曲线起始的型值点实现了曲线的闭合。
2 试验效果
为了检测轮廓提取的效果,本文采用不同材质和色彩的物体测试切割线测定系统的适用性。本文选用陶土材质的小马、青铜材质的花瓶和石膏材质的伏尔泰塑像进行试验。采集所有试验对象的图像,并对其进行切割线自动测定,得到试验效果如图5 所示。
试验结果显示,切割线测定系统对于不同材质和色彩的物体具有较好的适用性。试验得到的切割线不仅能够完全包含物体,而且在局部凹陷处过渡平滑,与试验物体的贴合度好。同时,对于对称性物体如图5(b),切割线的对称性也较好。

图5 切割线自动测定结果
整体来看,切割线测定系统具有较好的稳定性和适用性。
3 结 语
本文设计了一种基于计算机视觉和图像处理技术的文物安全箱填充物的切割线自动测定方法。该方法采用长焦镜头拍摄文物像片,并使用严密的畸变校正模型对影像进行畸变校正;利用数学形态学的方法和细致的跟踪策略提取轮廓信息;对轮廓点进行了单应变换并提出了误差修正方程;基于向量积原理消除了轮廓的局部尖角并进行了法向定量缩放;使用三次B样条曲线对切割线进行了拟合。将本文的切割线自动测定方法运用在文物安全箱填充物的生产过程中,可以达到较好的切割效果,为文物及其他精密物品的保护安置提供了技术保障。