隧道洞口边坡变形的多阶段递进预测研究
2018-11-01蒋桂梅李常茂任庆国
蒋桂梅, 李常茂, 任庆国
(陕西铁路工程职业技术学院, 陕西 渭南 714000)
0 引言
随着隧道建设的快速发展,隧道洞口边坡的稳定性问题也成为研究的重点。对隧道洞口边坡进行变形监测,并运用智能方法对其变形进行预测,可以掌握洞口边坡的变形规律,及时发现问题,指导现场施工[1-3]。由于隧道洞口边坡受地形地貌、岩土性质及降雨等多种因素的影响,其力学性质具有较大的不确定性,非线性特征明显[4],会导致监测数据含有一定的偶然误差,影响预测精度,因此采用小波去噪能很好地剔除误差信息[5],达到趋势项与误差项的分离。而且,在边坡的变形预测中,支持向量机是一种常用的预测方法,如曹延飞等[6]利用支持向量机和混沌原理相结合的方法,建立边坡的支持向量机预测模型,结果显示该模型具有很高的预测精度,泛化能力较强; 郑志成等[7]利用粒子群算法对LSSVM模型进行优化,较传统预测模型具有较大的优越性,对边坡变形预测的实用价值较强。因而,本文以粒子群算法和最小二乘法对支持向量机进行优化,建立PSO-LSSVM模型对趋势项序列进行预测。另外,ARMA模型对随机性强的误差序列具有较强的适用性,如曹净等[8]将ARMA模型应用于基坑变形误差项的预测中,取得了较好的效果,验证了该模型的预测能力,因此本文将其应用于误差序列的预测中。考虑到预测的目的是取得最优的预测精度,本文再以马尔科夫链为基本原理,建立MC的误差修正模型,对隧道洞口边坡的变形预测误差进行预测,该修正模型具有较好的适用性,如黄传胜等[9]将该模型应用于基坑预测误差的修正过程中,得出其预测精度满足施工要求; 刘淑官等[10]则将该模型与模糊理论进行结合,对基坑的拟合残差进行预测,提升了预测结果的精度及可靠性。
上述文献对边坡及岩土的变形预测进行了深入研究,虽取得一定成果,但多是单一模型的应用,预测结果的稳定性存在不足,缺少多种模型联合应用的研究。因此,本文将小波变换、PSO-LSSVM模型、ARMA模型和MC误差修正模型进行组合,建立综合全面的预测模型,旨在提高预测精度的同时,也增加预测结果的稳定性,以期为隧道洞口边坡的变形趋势判断提供一定的依据。
1 基本原理
1.1 预测思路
本文边坡变形预测的基本思路为: 利用小波去噪分离边坡的变形监测数据,并利用最小二乘算法和粒子群算法优化的支持向量机模型和ARMA模型分别对边坡变形的趋势项和误差项序列进行预测,将两者的预测结果进行叠加,即可得到边坡变形的综合预测结果。最后,对变形预测结果的精度进行检验,若其不满足期望精度,再利用MC误差修正模型对预测结果进行误差修正,旨在得到更高的预测精度。具体预测模型的流程如图1所示。
预测模型的计算过程如下:
1)数据处理。在若干不确定因素的影响下,边坡的变形监测往往并不是等距监测的,为满足本文预测模型的需要,需要对非等距序列进行等距处理,处理方法为拉格朗日插值法。同时,受监测条件、测量仪器等因素的影响,监测数据往往含有误差信息,进而采用小波去噪对监测数据进行去噪处理,并探讨不同参数对去噪效果的影响,选取最优去噪结果将边坡的变形序列分为趋势项和误差项序列。
2)边坡变形的初步预测。根据前述去噪处理,将隧道变形序列划分为了2个子序列,考虑到支持向量机是根据最小化原理求解二次规划的问题,善于进行线性求解,因此,将其作为趋势项序列的预测模型,为提高运算速度,实现参数优化,再利用最小二乘算法和粒子群算法对支持向量机进行优化; 同时,误差项序列具有较强的随机性,而ARMA模型能较好地处理该方面的问题,因此将其作为误差序列的预测模型; 最后,将两者结合即得边坡变形的初步预测结果。
3)误差修正预测。对初步预测结果的精度进行检验,若其满足期望精度,则停止预测,进入结果分析阶段; 若其不满足期望精度,则利用MC误差修正模型,对初步预测的预测误差进行修正,进一步提高预测精度,直到满足期望精度。
1.2 小波去噪
受各种因素(如测量环境、仪器精度及人为因素等)的影响,监测结果中会不同程度地包含一些误差信息,这些信息会降低预测精度,也影响对预测结果的分析[11-12]。小波变换是一种有效剔除误差信息的方法,其去噪步骤如下。
1)小波分解。根据小波函数构造相应的构造矩阵,将输入信息分解为若干互不重叠的频率信号。分解公式可表示如下:
式中:bi,x为原始输入信息;ci,x为高频系数;e(n)为低通滤波器系数;f(n)为高通滤波器系数;i为小波分解层数。
2)阈值处理。根据选定的阈值选取标准和方式,对各层频率信号进行阈值处理,即去除误差信息,保留有用信息。
3)小波重构。将上一步去噪后的数据进行重构,得到去噪后的估计值,其算法为:
zi-1,n=∑(bi,xen-2x+ci,xfn-2x)。
(2)
式中:zi-1,n为去噪后的估计值;ci,x为高频系数。
在去噪过程中,有许多因素对去噪效果具有明显的影响,如小波函数、阈值选取标准、阈值选取方法及小波分解层数,为得到最优的去噪效果,并探讨各因素对去噪效果的影响规律,本文采用逐步试算法对边坡变形数据进行去噪处理。
另外,小波去噪的效果评价指标包括均方根误差、信噪比、平滑度指标和互相关系数,各指标代表了不同的含义,从不同方面对去噪效果进行评价。因此,本文将上述4个指标作为基础指标,并将各指标的归一化值进行累计,得到综合评价指标,将其作为去噪效果优劣的判断指标。
1.3 支持向量机
支持向量机能利用非线性映射函数实现输入信息向高维空间的映射,是一种统计学习算法[13-14]。同时,支持向量机的准则是结构风险最小化,即缩小泛化误差的上界,达到提高预测模型泛化能力的目的。但是,该方法在应用过程中的参数设定具有很强的主观性,对使用者的应用能力要求较高,若不能设置合适的模型参数,将导致预测精度不高、陷入局部最优解等问题。因此,采用最小二乘法和粒子群算法对支持向量机的参数进行优化,以达到提高预测精度的目的。
LSSVM是20世纪末提出的一种新型支持向量机,能有效地解决传统支持向量机的模式识别问题,并利用二次规划法,将经验风险的一次方转变为二次方,减小计算的复杂性,且将应用过程中的不等式约束转变为等式约束,而权向量的空间变化可表示为:
约束条件如下:
yi=ωTφ(xi)+b+ei。
(4)
式(3)—(4)中:ω为权向量;b为待定参数;γ为容错惩罚系数;ei为松弛因子(应大于0)。
通过对上述权向量的求解,即可得到LSSVM模型的回归函数
同时,经过实践检验,在LSSVM模型的应用过程中,通常采用交叉验证对参数进行试算,使得核函数对预测结果具有较大的影响,易造成盲目性大、效率低等问题。因此,本文进一步采用粒子群算法对核函数进行参数优化。
粒子群算法是一种基于个体在群体运动中的信息共享,对个体运动从无序到有序的演化过程进行求解,进而获得最优解。PSO算法对LSSVM模型核参数的优化过程如下: 1)选择合适的PSO适应度函数,并对相关参数进行初始化; 2)根据适应度函数计算得到各粒子的函数值; 3)将粒子的适应度函数值、自身最优值和全局最优值进行比较,若前者相对更优,则对后两者的值进行相应的更新; 4)对全局最优解进行精度判断,若未达到期望,则进一步增加迭代次数,并对粒子的位置和速度进行调整,否则结束优化过程,并确定相关参数。
1.4 ARMA预测模型
ARMA模型为自回归滑动平均模型,其基本思想为: 利用相应的数学模型来解决某些单个序列不具有规律性,而整体序列却具有较强规律性的问题。在ARMA模型的应用过程中,可将时间序列值表示为:
yt=φ1yt-1+φ2yt-2+…+φpyt-p+ut-θ1ut-1-
θ2ut-2-…-θqut-q。
(6)
式中:yt为时间序列值;φk为自回归系数;θk为滑动平均系数;p、q为系数阶数;ut为白噪声序列。
该模型的具体预测过程如下:
1)时间序列的检验和处理。基于变形时间序列作偏相关和自相关的分析图,若序列不符合平稳性条件,则采取差分或对数差分的方式,使其自相关和偏相关系数趋于0,并确定相应的差分阶数。
2)模式识别。若变形时间序列已经满足了平稳条件,且具有拖尾性,则根据拖尾性质估计出系数的阶数,初步确定模型。
3)参数估计及检验。根据相关模型准则,对初选模型进行参数优化,并确定出计算模型,且对残差序列进行白噪声检验,以验证序列的随机性。
4)模型的预测分析。将样本期数据进行扩展,以得到预测期的预测值,并对预测结果进行分析。
1.5 MC误差修正模型
为达到提高预测精度的目的,对初步预测的误差序列采用马尔科夫链进行误差修正,即建立MC误差修正模型。在修正模型的建立过程中,将初步预测结果的误差序列进行划分,将其划分区间表示为S=[S1,S2,…,Sn],共n个区间,并将由状态Si转变到Sj状态的m步概率表示为:
式中:Mi为Si状态的个数;Mij(m)为状态转移所需的次数。
同时,通过建立位移转移矩阵,对误差序列进行修正,且将误差序列的中点看作成最大可能的误差值,则可将预测值表示为:

(8)
式中:F(x)为修正后预测值;f(x)为预测值;Δ*为误差平均值;ΔU、ΔD为误差预测的上下限。
2 实例分析
2.1 工程概况
将文献[4]中的实例数据作为本文预测模型效果检验的数据来源。某隧道是我国目前最大断面的高速公路隧道,具有双洞8车道的规模。该隧道的最大埋深为98 m,开挖面积为241 m2,开挖宽度和高度的最大值分别为20.7 m和13.58 m。同时,该隧道具有扁平率低、开挖跨度大、施工工序复杂等特点,且随爆破次数的增加,会导致围岩的多次扰动,尤其是在洞口地带,由于洞口处一般第四系浮土较厚,基岩风化程度较高,导致除施工因素外,地质条件也更为复杂。因此,为保证进洞、出洞的施工安全及洞口边坡的安全,对隧道洞口边坡的变形进行监测,监测仪器为全站仪,并根据监测信息,及时预测洞口边坡的变形趋势,以保证大断面隧道的施工安全。其中,洞口边坡中部监测点的代表性最强,其变形曲线如图2所示。
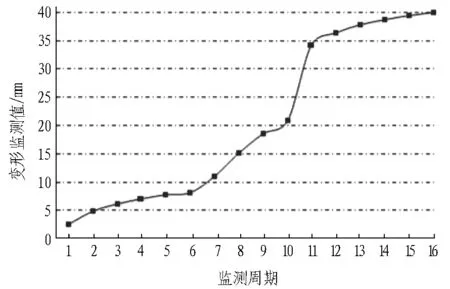
图2 隧道洞口边坡变形曲线
由图2隧道洞口边坡的变形曲线可知该变形曲线具有“S”曲线的特征,可分为初期变形阶段、增速变形阶段和减速变形阶段,最大累计变形值为40.02 mm。为进一步分析隧道洞口边坡的变形规律,对其变形速率进行统计作图,如图3所示。根据隧道的变形速率特征,得出最大、最小变形速率分别出现在第11和第6监测周期,变形速率分别为13.37 mm/周期和0.33 mm/周期,平均变形速率为2.5 mm/周期。同时,隧道洞口边坡变形起伏较大,具有一定的“驼峰”特征。
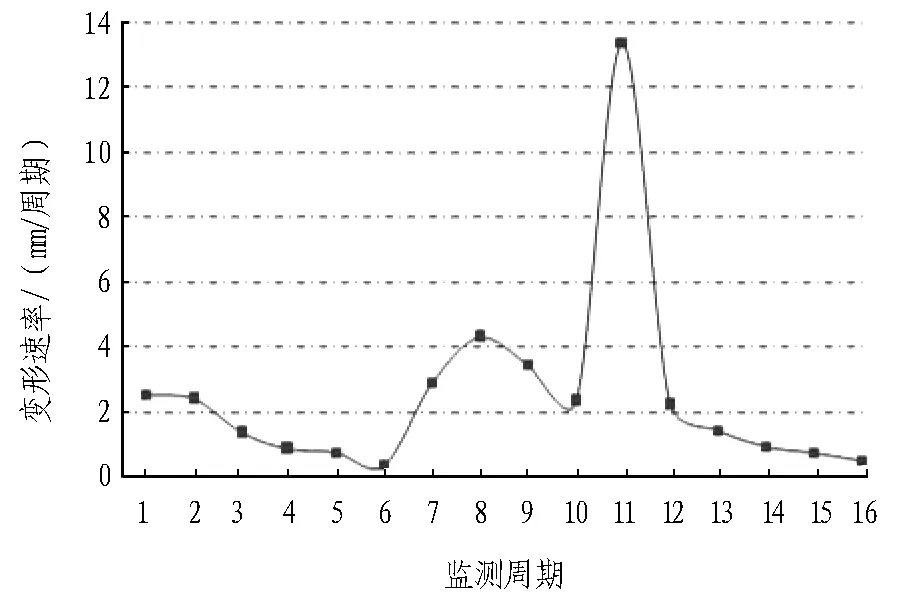
图3 隧道洞口边坡变形速率曲线
2.2 小波去噪
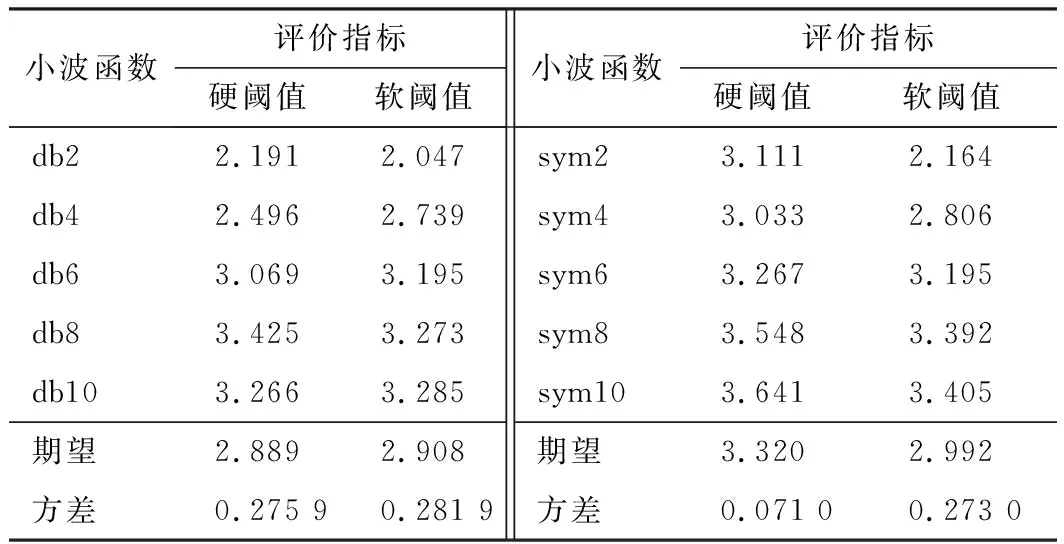
以小波重构对变形数据进行去噪处理,并探讨不同参数设置对去噪效果的影响。在探讨阈值选取方法的过程中,结合文献[15]的研究成果,仅探讨偶数阶次的db和sym小波函数在启发式阈值标准和10层分解时的去噪效果,结果如表1所示。
表1不同阈值选取方法的去噪效果
Table 1 Denoising effects of different threshold selection methods
小波函数评价指标硬阈值软阈值小波函数评价指标硬阈值软阈值db22.1912.047db42.4962.739db63.0693.195db83.4253.273db103.2663.285期望2.889 2.908方差0.275 9 0.281 9sym23.111 2.164sym43.033 2.806sym63.267 3.195sym83.548 3.392sym103.641 3.405 期望3.320 2.992 方差0.071 0 0.273 0
根据表1结果对比,得出两小波系在对应各阶次的去噪效果,基本以硬阈值的去噪效果最优,且db小波系的硬阈值和软阈值的期望值分别为2.889和2.908,方差值分别为0.275 9和0.281 9,以软阈值的去噪精度略优,但硬阈值具有更好的稳定性; 而在sym小波系中,对应的期望值分别为3.320和2.992,方差值分别为0.071 0和0.273 0,均以硬阈值的去噪效果最优。同时,在对应阈值选取方法中,均以sym小波系的去噪精度和稳定性相对更好,且考虑到db小波系在不同阈值选取方法下的去噪精度和稳定性具有不一致性,为减小文章篇幅,本文综合探讨sym小波系在硬阈值选取阈值条件下的去噪效果。
不同阈值选取标准的去噪效果如表2所示。根据表2可知: 不同阈值选取标准对去噪结果的影响还是存在的,但对比四者期望值及方差值均相差不大,其中启发式阈值的去噪精度及稳定性均最优,其次是固定式阈值、最大最小值阈值和无偏估计阈值,最大最小值阈值去噪结果的稳定性最差。因此,综合确定启发式阈值作为本文去噪的大阈值选取标准。

表2 不同阈值选取标准的去噪效果
在对不同分解层数的去噪效果进行分析时,为达到扩大探讨范围又减小篇幅的目的,本文主要对6—14层间偶数层的去噪效果进行研究,结果如表3所示。由表3可知: 不同分解层数在对应小波函数的去噪效果也具有明显差异,其中,就去噪精度而言,以10层分解的去噪效果最佳,其次是8层、12层、14层和6层; 而在去噪稳定性方面,仍以10层分解的稳定性最好,其次是14层、12层、8层和6层。因此,综合得出10层小波分解的去噪效果和稳定性最优,确定其作为小波去噪的分解层数。
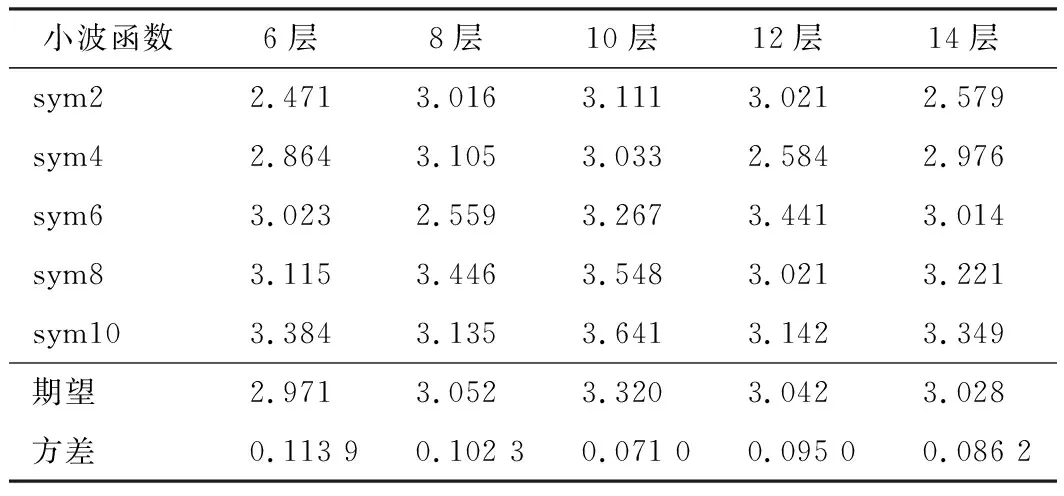
表3 各分解层数的去噪效果
另外,对sym小波系各阶次的去噪效果进行评价,结果如图4所示。可知去噪结果总体随阶次增加而变好,其中以sym9的去噪效果最优,指标值为3.686;sym4的去噪效果相对最差,指标值为3.033。
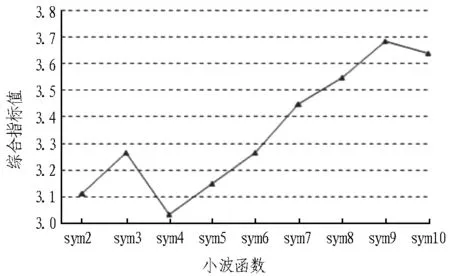
图4 小波阶次去噪效果
综合上述分析,本文选取sym9作为小波函数,以启发式阈值为阈值标准、硬阈值为选取标准,其在10层小波分解下的去噪结果作为本文趋势项及误差项的分离依据。
2.3 变形预测
2.3.1 趋势项预测
本文采用多重优化的支持向量机模型对边坡变形的趋势项序列进行预测,结果如表4所示。
对比不同优化阶次的预测结果,得出SVM预测、LSSVM预测及PSO-LSSVM预测结果相对误差的平均值分别为4.05%、3.47%和2.06%,具有随优化过程的深入,趋势项的预测结果相对更优的特点; 同时,三者预测结果的方差分别为0.547 6、0.186 6和0.418 7,以LSSVM预测的稳定性最优。但对比3种模型在预测精度及稳定性方面的优劣,发现相互具有一定的差异,说明初步预测结果的波动性仍是存在的。

表4 趋势项预测结果
2.3.2 误差项预测
采用ARMA模型对边坡变形的误差项序列进行预测,结果如表5所示。根据表5误差项预测结果,最大、最小的预测误差分别为0.625 mm和0.16 mm,预测结果的波动起伏较大,预测结果精度不及趋势项的预测结果,其原因主要是与误差项序列含有较大的不确定因素导致的,说明小波去噪分离趋势项和误差项的效果较优,达到了预期目的。

表5 误差项预测结果
2.3.3 综合预测
基于上述对趋势项和误差项的预测,将两者进行叠加,即得到边坡变形的综合预测值,结果如表6所示。边坡变形预测结果的最大、最小相对误差分别为3.01%和1.11%,平均相对误差为2.17%,方差值为0.592 9。对比趋势项即误差项的预测结果,综合预测的预测精度要略小于趋势项的预测精度,但较误差项的预测精度要好。
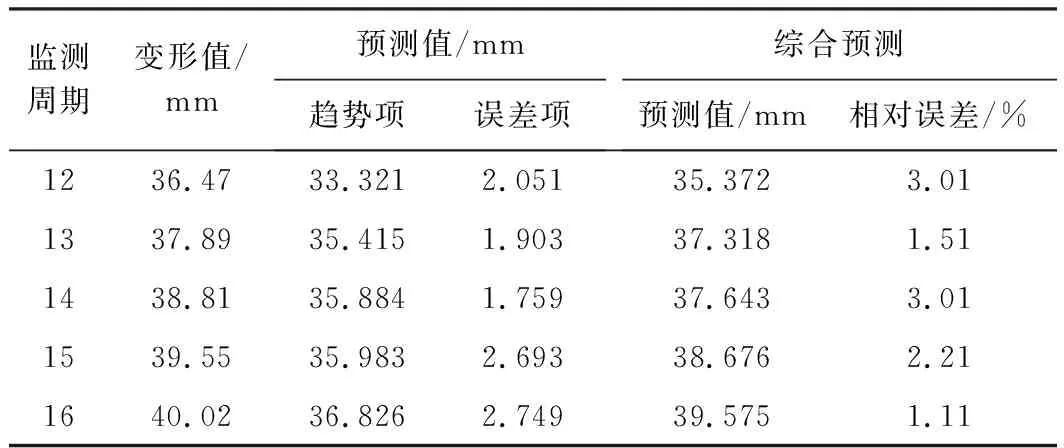
表6 边坡变形综合预测结果
2.4 误差修正
为进一步提高预测精度,再利用MC误差修正模型对边坡预测误差进行修正,结果如表7所示。修正后预测结果的相对误差均值为1.03%,方差为0.042 6,最大、最小值分别为1.25%和-0.71%。对比表7中的结果,得出误差修正可以很大程度地提高预测精度和稳定性,验证了本文预测思路的有效性。
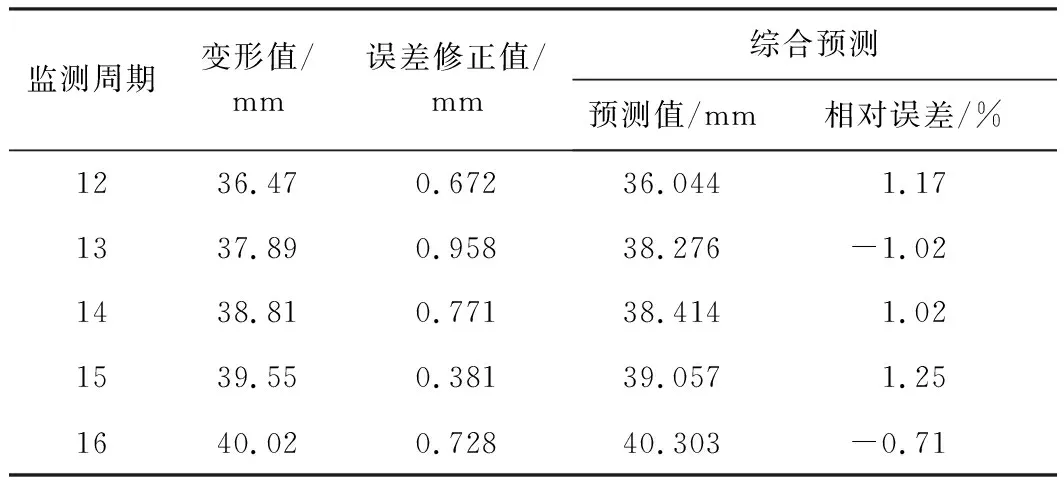
表7 修正预测结果
3 结论与讨论
1)边坡变形具有非平稳和非线性的特点,通过小波去噪,利用PSO-LSSVM模型和ARMA模型分别预测趋势项和误差项,两者叠加得到初步预测结果,再利用MC误差修正模型进行误差修正,综合得到预测结果,能真实得到边坡的变形情况,具有较大的适用性。
2)通过小波去噪分析,得出不同参数对边坡变形序列具有不同的去噪效果,结合本文实例,以sym9小波函数、启发式阈值标准、硬阈值选取标准及10层小波分解的去噪效果较优,能有效剔除变形序列中的误差信息。
3)PSO-LSSVM模型预测结果的相对误差均值为2.06%,优于初步预测的2.17%,误差项的预测结果相对最差。通过误差修正能有效提高预测精度,得到边坡变形最终预测结果相对误差为1.03%,方差为0.042 6,具有较高的精度和稳定性,验证了本文预测模型的有效性。
4)本文结合了小波变换、PSO-LSSVM模型、ARMA模型和MC误差修正模型的各自优点,使其相互成为一个综合的变形预测系统,具有较好的泛化能力,对其他非线性领域也具有较好的推广潜力。但在实际工程应用中,鉴于不同工程实例所处地质条件、施工条件的差异性,有必要根据具体工程实例进行重新计算,以探讨本文模型在其余类似工程中的有效性。
