仿人形爬坡机器人的设计及分析
2018-11-01娄家润李三平孙国东
娄家润,李三平,孙国东,王 松
(东北林业大学 机电工程学院,黑龙江 哈尔滨 150040)
0 引言
相比轮式、履带式机器人,双足机器人的运动灵活性和对环境的适应性具有显著优势。主要表现在两个方面:一是离散式的落脚点;二是具有多肢体、多自由度的特征。因此腿足式机器人在各方面有许多应用。
目前,美国已经研制出Petman机器人、Atlas机器人,这两款机器人能模仿人行进;日本研制的HRP4C机器人能够模仿人的动作,完成舞蹈动作;意大利研制的Coman机器人结合了刚柔关节,可完成机器人的交替跳跃。
国内研究领域近些年来在仿人机器人方面也取得了一定成果,哈尔滨工业大学的HIT-Ⅲ机器人具有12个自由度,能实现人类的基本运动形式,如静态步行与动态步行、上下坡以及上下楼梯[1]。
但是目前对仿人机器人步态多关节协调控制领域的相关研究相对缺乏[2]。本文针对这一问题,主要分析了仿人机器人机械本体的设计、步态规划并对步态规划进行了初步拟定。
1 机器人的总体设计
仿人爬坡机器人的总体研究思路是:通过对人体的肢体结构与运动结构模式的模仿来实现仿人机器人爬坡运动,提高其运动能力。模仿不代表要进行完全的复制,并且这也是不可能的,要考虑到对它的优化与改进,保证其能实现预定要求,进而提高运动能力。
1.1 自由度分析
人体关节结构过于复杂,在实际建模过程中,为了简化分析,需要去掉冗余关节。经过分析发现有几个重要关节应当保留,要保留的关节及其原因如下:①头部,机器人头部要安装传感器,便于以后的反馈调控;②肩关节,机器人需要通过摆臂来平衡迈腿所造成的力矩不平衡;③肘关节,具有辅助调节平衡作用;④髋关节,实现迈步以及躯体动作,辅助步行过程中的平衡;⑤膝关节,调整摆动腿的着地高度与角度,适应步行环境;⑥踝关节,调整脚掌与地面接触状态,配合腿部与躯体移动。
人体关节形式主要是球铰型的,但考虑到球铰型关节过于灵活,不方便控制,所以使用多个旋转型关节代替球铰型关节。该机器人全身共分配有17个自由度,其具体的连杆、自由度分配和转轴如图1所示。

图1 仿人机器人自由度分析
该方法虽然降低了机器人的控制难度,加强了机器人运动的稳定性,但是增加了关节部分结构尺寸,所以机器人结构尺寸与人体结构尺寸有偏差。
1.2 机器人的结构设计
结合自由度分析,依据人体上、下身比例特点并结合实际情况,设计机器人的具体结构。
拟定机器人的各关节选用舵机驱动,考虑减小机器人的体积并减轻重量,将机器人的结构做成框架型。除此之外,通过对人体运动进行分析,假定单侧转动范围极限角度为90°,框架的设计在保证舵机活动范围的条件下,有效地利用了舵机所占的空间[3]。
此机器人在设计过程中,髋关节中的两个轴的轴线与踝关节两个轴的轴线是相交的,这样使得关节角度的相关计算变得较为容易。设计后的机器人整体高度为654 mm,利用UG建立的机器人三维实体模型如图2所示。
1.2.1 机器人材料
考虑在满足机器人强度要求的条件下,应尽可能减轻关节负担,降低机器人实际重量,机器人采用5052铝材,它具有材料密度低、抗拉强度高、延伸率大、疲劳强度高的特点。
1.2.2 驱动原件选择
在结构布局设计之后,可以推算出机器人的重量和质心位置。考虑到脚踝处在运动过程中所需力矩最大,在设计计算过程中只需要计算校核脚踝处所受力矩即可,其转矩的计算分析图如图3所示。
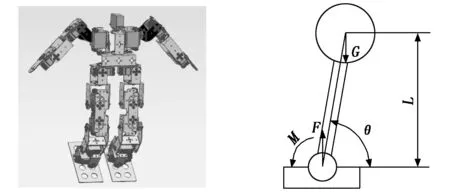
图2仿人机器人机械结构的三维实体模型图3转矩计算分析
关节所需转矩由下式计算:
M=GLcosθ.
(1)
其中:M为伺服电机输出轴的转矩,即关节所需转矩;G为重量;L为关节转轴中心到质心距离;θ为机器人垂直状态到关节转动后所夹角度。
由于机器人在运动过程中各关节单元换向频繁,对动作反应的灵敏性和运动稳定性要求高,因此通过分析比较各种驱动方式,并经计算选择SR-1501MG标准数字电机,其扭转力矩可达1.5 Nm。
2 机器人的步态规划
由于人在实际行走过程中运动机理十分复杂,为了方便计算与步态规划,在坡度不是很大时,即坡度在10°~20°时,我们做出如下假设:机器人行走过程中摆臂所提供的力矩与迈腿所产生的力矩平衡;地面能够提供足够的支撑力与摩擦力;机器人上半身保持直立,质心相对于躯干坐标系位置不变。
以前进运动为例,将机器人步行划分为三个阶段:起步阶段、周期性步行阶段和停止阶段。而周期性步行阶段又可细分成单腿支撑期和双腿支撑期[4]。在行进过程中,腿部各关节的移动将造成重心的移动,为了保证机器人在行进过程中不失稳,引入ZMP规划对机器人在斜面上的运动轨迹进行分析。对连杆与关节之间的运动关系进行正运动学分析,再根据逆运动学,求得各个运动时期关节角的变换函数[5]。考虑到机器人在行进过程中前向平面与侧向平面运动存在耦合,实际运动杆状图如图4所示。图4中机器人的虚线部分为左半身。
如图4所示,O状态为起步状态;A~C阶段为左腿支撑相阶段,其具体过程为:左腿单腿支撑阶段、右腿单腿摆动阶段、摆动腿发生碰撞阶段;C~E阶段为右腿支撑相阶段,其运动情况与左腿支撑相相对;A~E整个阶段为周期性步行阶段;F状态为停止状态。
3 爬坡运动控制分析
3.1 控制思路
本文使用单片机与上位机进行通讯,调试下载动作程序;而后机器人按预测轨迹行进,在实际运行过程中,由于存在模型不准确和外界干扰等情况,将实际测量值和模型预估计值进行比较,实时矫正误差。模型的控制原理如图5所示。
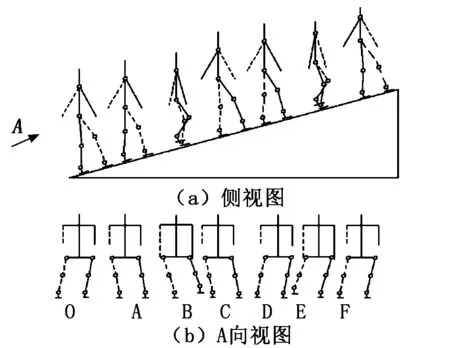
图4 步态规划
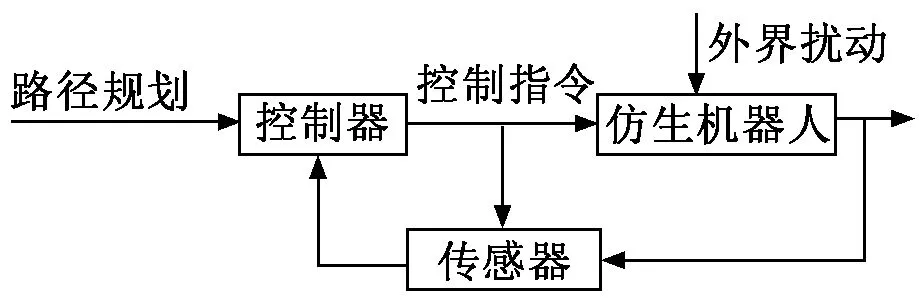
图5 模型控制原理
3.2 传感器选择
在机器人宏观调控的过程中,采用CCD图像传感器作为视觉传感器,保证其在预定轨迹上行走。鉴于落地时刻为刚性冲击,情况特殊,且设计过程是全脚掌落地,因此在足底安装多个一维力传感器,通过测量计算压力中心来辅助调节质心位置。机器人头部和脚部传感器布置方式分别如图6、图7所示。

图6机器人头部传感器布置图7机器人脚部传感器布置
3.3 控制器的选择
结合机器人的运动要求与控制要求,本文选择32路舵机控制器,鉴于要外接CCD图像传感器,因此引入STM32单片机,并通过32路舵机控制器上预留的单片机TTL电平串口接口进行通信。
4 结束语
针对爬坡要求,设计了一种具有17个自由度的仿人爬坡机器人,实现小坡度(10°~20°)上的运动。采用UG进行建模,通过步态规划分析,提出控制要求并选择控制器,确定了框架材料与驱动方案。为了实现爬坡运动,做出合理假设,对机器人运动进行了步态分析。
