用于角位移补偿的新型XYθ微动定位平台
2018-11-01关均铭郭晓晖
邱 迁,关均铭,郭晓晖,汤 晖
(广东工业大学 机电工程学院,广东 广州 510006)
0 引言
目前精密制造及装配等操作精细程度越来越高,要满足高精度、多自由度的定位要求就需要研制出新型的精密运动平台[1-2]。晶圆级芯片封装是一种经过提高和改进的芯片尺寸封装,为保证芯片封装的正确性,必须做好高精度定位检测工作,高效准确的检测设备是晶圆级封装高质量的必要保证[3-4],其中晶粒中心与元件拾取中心是否保持一致决定了倒装的成败。
本文结合柔性纳米定位机构及平面三自由度的定位需求创新性地设计了一种带角位移误差补偿的微定位平台,有效地提高了传统晶圆检测平台系统的性能。
1 3-RRR微动平台结构设计
1.1 柔性铰链
柔顺机构能够传递或转换运动、力或能量,它不仅由运动副传递运动,还至少从其柔性部件的变形中获得一部分运动。一级杠杆放大机构的放大原理和结构比较简单,使用的柔性铰链比较少,因而具有较高的传递效率,目前应用比较广泛。实际中,理想状态的刚性结构其实会发生轻微弯曲,如图1所示。

图1 杠杆位移放大器的受力分析图
在柔性铰链机构产生运动时,各柔性铰链不仅发生了转角变形,同时也会有拉伸和压缩变形产生,从而使柔性铰链的回转中心产生偏移,影响机构的放大率。设作用在柔性铰链上的轴向力为F2,反向作用力为F1,力矩为M,柔性铰链的转角为θ,柔性铰链的轴向变形为Δy,输入力到作用在柔性铰链上的点的距离为l1,柔性铰链总长为l,Xin为输入端位移,Xout为输出端位移。
根据受力平衡关系有:
F1+F2=0.
(1)
M-F1l1=0.
(2)
柔性铰链的变形量和受力关系为:
M=KM×θ.
(3)
F2=KF×Δy.
(4)

由变形几何关系,得:
Xout=l×θ-Xin.
(5)
故放大倍率A:
(6)
1.2 3-RRR 微动平台补偿器
基于以上杠杆位移放大器结构的理论分析,本文创新性地设计了一个三方向对称式一级杠杆放大机构组成的3-RRR微纳运动平台。将杠杆位移放大器巧妙地设计成L型,不仅增大了放大倍数,还节省了空间,使得整个微纳补偿装置结构简单紧凑,其平面结构如图2所示。
2 有限元分析
使用ANSYS软件,通过模态分析验证其动态性能,选用 Al7075-T6 作为微纳位移补偿装置的材料。图3为仿真得到的该3-RRR机构的前6阶模态,其中颜色越深代表输出位移越大,反之越小。第1阶模态频率为261 Hz表明了该机构具有较大的固有频率,证实了该微纳定位平台拥有较高的带宽及精密定位性能。
3 实验系统搭建与测试
本实验中的3-RRR微纳位移补偿装置是由一整块型号为Al7075-T651的航空铝通过电火花线切割方式加工而成,如图4所示。驱动器使用推叠式压电陶瓷(型号为P887.91;行程为32 μm±10%,最大值为38 μm±10%;阻滞力为1 850 N)驱动3-RRR微纳位移补偿装置,选用控制卡(型号为GTS-800-PV-PCI-G,8通道)来控制运动,使用光纤位移传感器检测位置误差。做微动部分测试时,为了减少外界振动干扰,将3-RRR微纳位移补偿装置等关键设备放置于高性能阻尼隔振平台上。

图2 3-RRR微动平台平面图
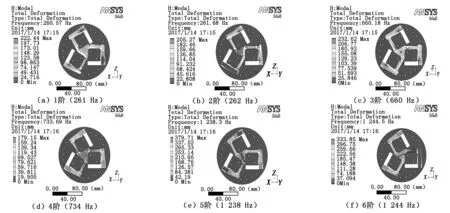
图3 3-RRR机构的前6阶模态
通过ANSYS仿真可知,柔性3-RRR机构并不能实现XY方向的平动,为了能够达到机构平动的目的,我们在这里设置θ′为θ轴的标定零点,即在机构运动初始就设置(θ=θ′,X=0,Y=0)为运动相对零点,并做了以下开环的运动控制实验。
(1)X单自由度运动模式,即X轴参考信号为幅值为20 μm的Sine波,Y轴与θ轴参考信号保持为零。X轴的轨迹追踪误差控制在0.5 μm(误差率小于0.8%)以下,如图5所示。
(2) 同理,Y单自由度运动轨迹如图6所示,Y轴的轨迹追踪误差控制在0.7 μm(误差率小于1.1%)以下。
(3)θ单自由度运动模式如图7所示,θ轴的轨迹追踪误差控制在0.003°(误差率小于0.15%)以下。
通过以上实验结果可以看出:①前期建立的运动学模型精准,机构的性能满足设计要求;②3-RRR并联机构的多轴位移耦合特性对运动定位精度有一定的影响。
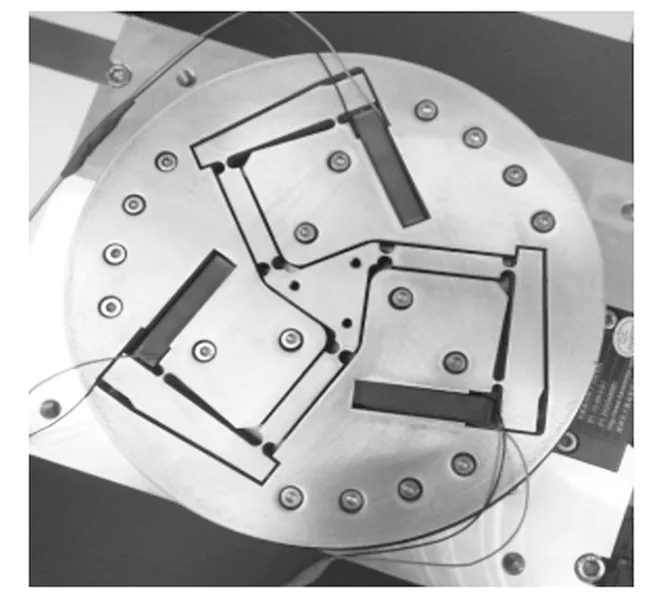
图4 3-RRR微动平台实物图
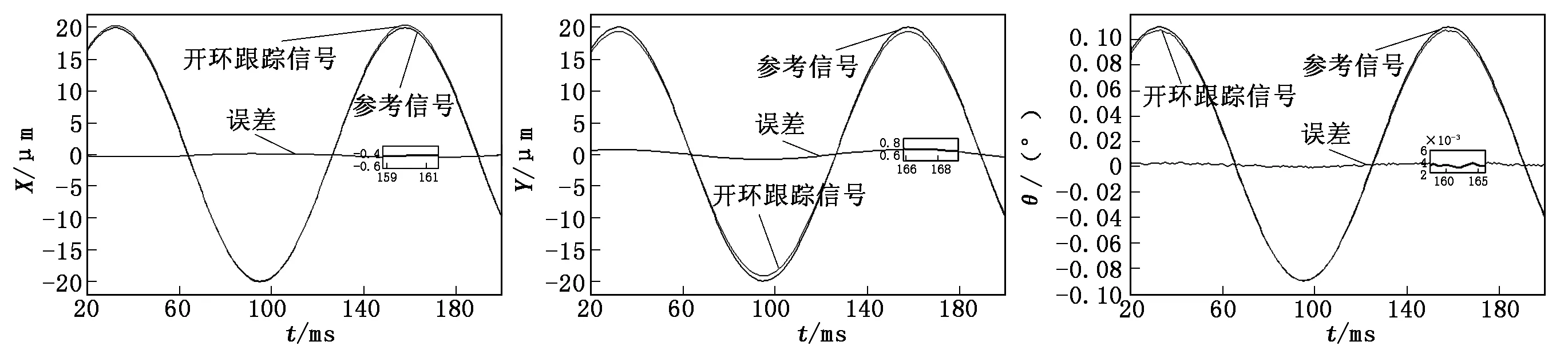
图5X单自由度运动轨迹图6Y单自由度运动轨迹图7θ单自由度运动轨迹
4 总结
基于柔性铰链设计了一种新型带角位移的平面三自由度纳米位移补偿器,它具有体积小、重量轻、利于集成、减小运动负载惯量等优点。通过简单开环测试,其工作行程放大约2倍,定位精度为亚纳米级;通过使用ANSYS软件模态分析,得到的共振频率高达261 Hz,具有良好的动态特性。
