某越野车整车姿态参数化设计
2018-10-31韩伟
韩伟

摘 要:整车姿态设计是越野车辆整车总布置设计中的一项重要工作,它涉及到重量控制、造型、整车视野、悬架行程与刚度、操纵稳定性及通过性等诸多要素。本文在某4×4越野车整车姿态设计过程中,基于Excel表格与CATIA软件,应用参数化设计方法,分析了双横臂独立悬架系统刚度与地面线设计过程。该方法可以推广应用于同类型越野车整车姿态的设计中。
关键词:参数化设计;越野车;整车姿态;悬架刚度
中图分类号:U462.2 文献标识码:A 文章编号:1005-2550(2018)04-0025-04
Abstract: The complete vehicle attitude design is an important work in the overall layout design of the off-road vehicle, which involves many factors such as weight control, modeling, vehicle vision, suspension stroke and stiffness, handling and control stability and passing ability. In the process of attitude design of a 4×4 off-road vehicle, this paper analyzed the design process of the double wishbone independent suspension system stiffness and the ground line, using the application of parametric design based on Excel and CATIA software. This kind of method can be used to promote the complete vehicle attitude design of other off-road vehicles on the same platform.
Key Words: parametric design; off-road vehicle; the complete vehicle attitude; suspension stiffness
1 引言
在越野車辆整车总布置设计中,整车姿态设计是一项重要工作。
整车姿态是车辆的重要参数,涉及到重量控制、造型、整车视野、悬架行程与刚度、操纵稳定性及通过性等诸多要素。姿态的控制主要体现在地面线的设定上,为使整车姿态能够满足各方面要求,需要在整车概念设计阶段就要确定地面线。由于地面线的变化主要通过对悬架系统安装位置和刚度的调节来实现,在设计的过程中,首先根据整车初始姿态确定前后悬架硬点的初始相对位置坐标,对于轻型越野车,整车初始姿态角一般确定为0.5°~0.8°。搭载双横臂独立悬架的越野车辆,整车初始姿态一般由前后悬架硬点的Z向差值来确定,在确定整车初始姿态后,再通过悬架的刚度参数来设计整车空载、满载姿态,以满足整车高度、离地间隙等各方面的要求。悬架刚度参数的设定需要在保证乘坐舒适性的基础上,不断地优化直至满足为止。因此整车姿态的设计过程主要是前后悬架刚度参数的设定过程。
引入参数化概念,可以在更改布置方案时,仅通过更改相应的参数,驱动软件自动更新模型,可有效提高校核工作的质量与效率。
参数化设计指以参数约束模型为核心,以尺寸驱动为特征,通过修改基础模型的某些零件参数,CATIA软件自动完成对模型的重构,从而实现产品的设计和优化。参数化设计可以将隐式的设计实践转化为嵌入整个设计过程的显式知识,极大地改善了模型的修改重构手段,提高了设计的柔性。
本文基于CATIA软件和EXCEL表格,应用参数化方法,有效解决了某平台下一款4×4越野车型整车姿态设计问题。
2 整车姿态定义
整车姿态定义主要体现在地面线的设定。对于越野车,通常假设车架纵梁上平面为参考基准,设计状态作为初始姿态,在得到轮心坐标、轮胎型号、一定载荷下的轮胎半径、悬架刚度、各状态下轴荷与轮荷后,便可完成地面线绘制,整车姿态角也随即确定。
各状态下的轴荷、轮荷由整车重量管控对各系统的重量分配得到,设计状态的轮心坐标、轮胎选型、悬架选型参考同平台车型或者竞品车型。下面主要分析悬架刚度及各状态下轮心坐标的确定。
2.1 悬架刚度的参数关系
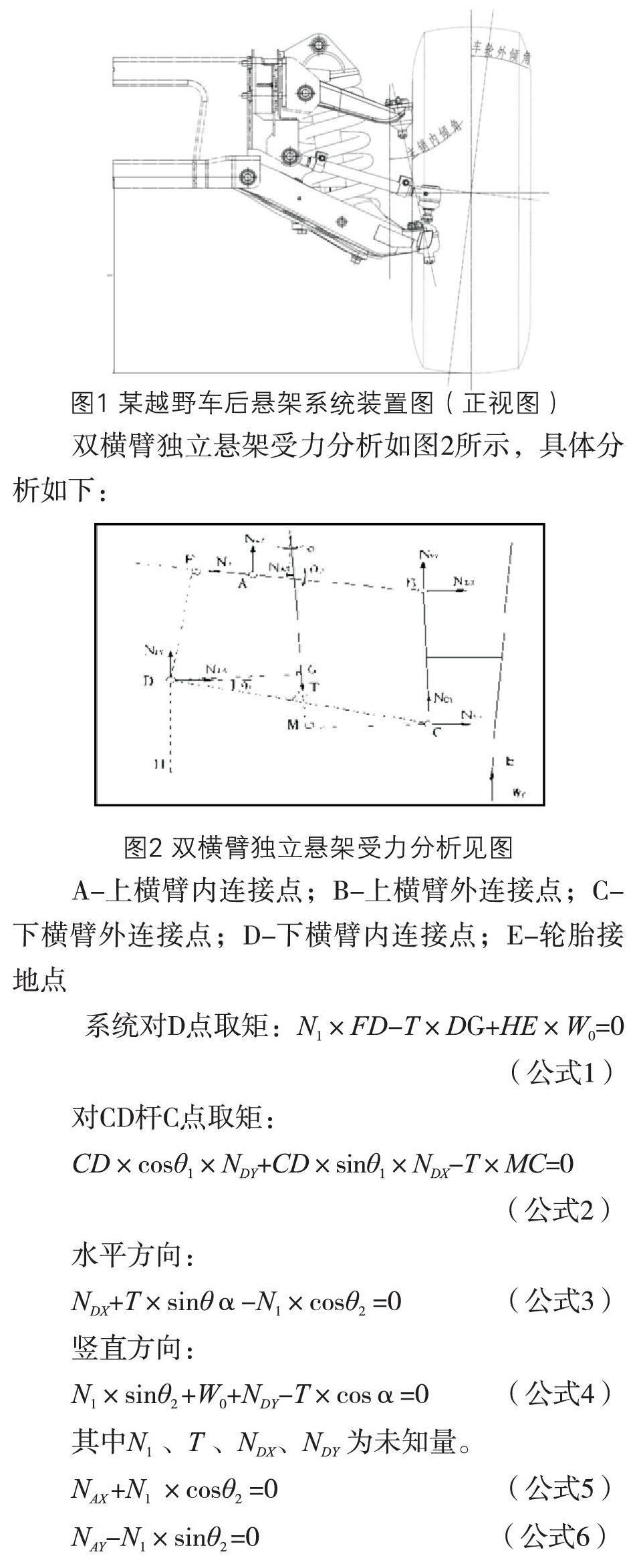
本文所研究的车型采用前后双横臂独立悬架,前悬架带横向稳定杆,后悬架带推力杆(如图1所示)。悬架系统设计需要综合考虑设计状态轮心坐标、整车高度、最小离地间隙、硬点布置、侧倾角刚度、上下轮跳、四轮定位参数、K&C;特性、整车操纵稳定性、整车NVH、通过性、零部件通用化等。
3 基于CATIA参数化模型建立
根据公式(1)~(16),通过EXCEL表格建立悬架系统参数设计计算表,可以得到螺旋弹簧刚度、悬架系统刚度、悬架系统偏频等参数,其它参数(例如,减振器、横向稳定杆、推力杆、悬架系统角刚度、侧倾中心高度等等)的计算,限于篇幅,本文不再赘述。各质量状态下整车姿态确定需要的参数可根据设计输入、各系统初步设计结果得到。在完成参数表后,应用CATIA软件,在零部件设计模块里,用Formula(f(x))命令导入这些参数。在建立参数化模型时,各硬点的约束尺寸都可以通过CATIA软件的公式编辑功能建立与已导入参数的关系。这样在调整方案时,就可以通过修改参数值,达到更改模型的目的。
通过以上设计并经过几次迭代,并对各状态下的姿态复核,校核各状态下最小离地间隙、整车高度、传动角范围、轮胎包络以及整车操纵稳定性、整车NVH等等,最终得到该越野车整车姿态参数如表1所示。
4 结论
在同一车型开发过程中,受到各种约束条件的限制,最小离地间隙,悬架行程,轮胎包络间隙,传动角范围,通过性,零部件通用化,以及基于底盘调校等,都需要对地面线进行微调和修正。另外对于同平台其它变形车,因轴荷、轴距等参数变化,也需要对地面线进行调整。本文结合我公司开发的一款越野车的实际经验,提出了一种基于参数化设计的整车姿态设计方法,可以很容易推广到其它同类越野车型,具有一定的设计参考意义。
参考文献:
[1]王新,李衡辉.某车型整车姿态分析[J].汽车科技,2009(3).
[2]罗文水,凌红芳,王师等.乘用车整车姿态设定及控制方法研究[J].机电工程技术,2014(8):116-121.
[3]程康,宋发宝等.乘用车整车设计与达成研究.2015中国汽车工程学会年会论文集:2087-2089
[4]刘惟信.汽车设计.清华出版社,2001.
[5]刘巧伶.理论力学.吉林科学技术出版社,2004.
[6]王霄锋.汽车底盘设计[M].北京:清华大学出版社,2010.
