家用双层消毒柜省力抬升机构的设计
2018-10-31贾志强胡永王佳新林文灿季俊生
贾志强 胡永 王佳新 林文灿 季俊生
广东美的厨房电器制造有限公司 广东佛山 528311
1 引言
目前市场上的家用消毒柜大都采用半嵌入式或全嵌入式的安装方式安装在灶台下方的橱柜当中。消毒柜以双层、三层结构为主,部分消毒柜内置碗篮固定在箱体内胆无法活动,部分消毒柜内置碗篮与消毒柜内胆采用滑轨连接,可以从柜中水平拉出。目前市面上内置碗篮可以水平抽拉出来的消毒柜,均无竖直抬升机构,无法改变碗篮的水平高度,导致下层碗篮的高度落差较大。考虑用户要将消毒物品放入或者取出消毒柜下层内置碗篮,需要长时间保持较大幅度的弯腰动作,体验性较差[1]。针对这个问题,本文设计了一种家用双层消毒柜碗篮的省力抬升机构,可满足现有家用消毒柜的尺寸需求,能够只通过人力将家用消毒柜下层的碗篮抬升一定的高度,使碗篮保持在一定高度的自锁限位机构,在抬升过程中提供一定的助力。
2 省力抬升机构的工作原理及工作组成
2.1 省力抬升机构的工作原理
本设计要求当中,需要将总重量为G的消毒柜碗篮及碗篮里面所盛重物保持水平的抬升至高度为L的位置处。因为是人力驱动,所以设计的机构应具有一定的省力效果。
若在竖直方向上放置滑轨直接抬升,为提升物体需要全程提供一个反向重力Gˊ,这个反向重力由人的拉力提供,即Fˊ=Gˊ。
若采用平行四边形的四连杆机构[2],同时放置恒力弹簧来进行助力缓冲,该机构运动示意图如图1所示。将碗篮的重量集中在后连杆下端点处进行分析,利用连杆抬升的过程可以看成迫使重量为G的重物绕着点A做半径为L的圆周运动旋转90°,连杆达到水平状态,在竖直方向将高度变化为L,从而达到抬升的目的。旋转过程中重物G产生的扭矩为T=GLsin,使其能够持续旋转,需要外力提供一个反向的扭矩Tˊ=GˊLsin,这个反向的扭矩由人的拉力F和恒力弹簧的拉力f提供,重力、恒力弹簧的拉力以及人的拉力有以下关系式:
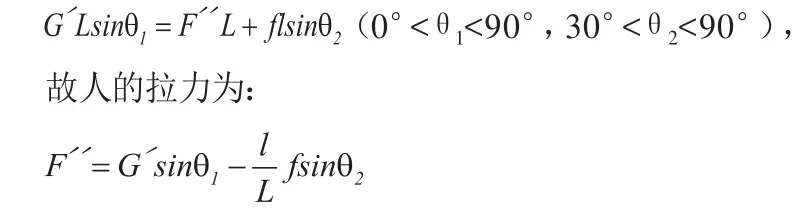
在θ1=90°,θ2=90°时,此时人的拉力变化至最大:

2.2 省力抬升机构的工作组成
省力抬升机构安装在家用双层消毒柜的下层,整体的抽拉和抬升工作依靠人力驱动进行,不需要任何电动驱动设备。
省力机构的工作组成如图2所示,图中A1为用于装载被消毒物品的碗篮,A2为内侧滑轨,A3为外侧轨道,A4为后连杆,A5为前连杆,A6为门把手,A7为固定侧板。A7固定侧板与消毒柜内胆利用铆钉进行铆接,整个运动过程保持静止;内侧滑轨A2在碗篮A1两侧对称装配,利用螺钉固定连接,内侧滑轨A2与外侧轨道A3之间可以水平滑动,即为碗篮A1的水平运动;后连杆A4与前连杆A5的一端分别固定在固定侧板A7上的转动轴上,另一端分别固定在外侧轨道A3上的转动轴上,当水平抽拉运动结束后,在人力的继续驱动下,后连杆A4和前连杆A5将分别绕固定侧板A7上的转动轴做圆周运动带动碗篮进行抬升。当碗篮达到指定位置时,锁定机构将碗篮进行锁定使其保持在固定的位置,如需将碗篮放回起始位置,则利用A6门把手上的释放机构进行释放即可。
2.3 本设计中解决的相关问题及创新
连杆机构被广泛地用在各类机械中,以实现运动的传递和转换。平行四边形的四连杆机构能够在运动中保持相对边始终平行,非常适合需要将平台整体升降移动的机械,无论是锻造操作机、煤炭支架、焊接机械等重型工业[3-5],还是升降收纳篮、重物提升机、客车行李舱门等日用机械[6-8]中都已经应用到了平行四边形的四连杆机构,因此选取平行四边形的四连杆机构作为提升机构,其稳定性在实际应用中得到证实。
现有的平行四边形四连杆机构大致分为三类:无辅助提升装置,如升降收纳篮[6];电动控制气弹簧升降,如客车行李舱门[7];电动机械式辅助升降,如丝杆螺母驱动[9]。现有的平行四边形四连杆机构的工作环境均为室温,而消毒柜的碗篮工作环境温度高达120摄氏度,超出了气弹簧的工作温度,因此无法采用气弹簧助力升降;采用机械式辅助升降结构无法解决机械传动结构的导热问题;采用无辅助提升装置在竖直方向上直接抬升碗篮平台,需要全程提供一个反向重力Gˊ,提升过程较费力。根据目前平行四边形四连杆机构的局限性,创新性地采用恒力弹簧来替代气弹簧,对四连杆抬升机构进行助力缓冲,达到省力的效果。
3 主要结构设计
3.1 抽拉抬升机构
如图3所示,该机构实现水平抽拉的动作有组件内侧滑轨A2、外侧轨道A3、陶瓷滚珠轴承A14、前限位端块A12、后限位端块A13。内侧滑轨A2横截面呈C形,滑轨的整体长度为外侧轨道A3的长度与内外侧轨道A2相对滑动距离之和;内侧滑轨A2的上下呈对称形的凹槽,用于与外侧轨道A3上的滑动轴承相配合,防止内外侧轨道脱落;外侧轨道A3四个子母螺钉将陶瓷轴承A14的内圈固定在轨道上,外圈与内侧滑轨A2触,前后滑动;与内侧滑轨A2相连接的为前端块、后端块,用于限制内侧滑轨A2在外侧轨道A3上的水平滑动距离。内侧滑轨A2与碗篮A1通过螺钉固定连接后,用户将碗篮A1向外拉伸时,内侧滑轨A2将相对于外侧轨道A3水平滑动。
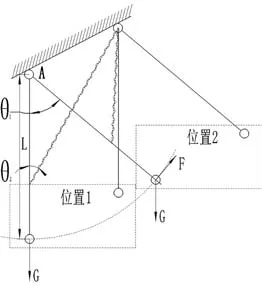
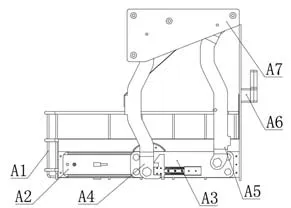
图2 抽拉抬升机构工作组成侧视图

图3 抽拉抬升机构工作组成轴视图

图4 水平滑轨设计示意图
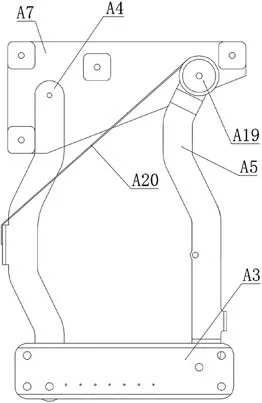
图5 抬升机构设计示意图

3.2 省力抬升机构
如图4所示,该机构实现抬升动作主要由组件外侧轨道A3、前连杆A4、后连杆A5、固定侧板A7、恒力弹簧固定组件A19和恒力弹簧A20。外侧轨道A3、前连杆A4、后连杆A5和固定侧板A7组成一个四连杆机构,固定侧板A7固定在消毒柜的内胆上作为四连杆机构的机架,外侧轨道A3与前后连杆相连,作为连架杆。固定侧板A7与两连杆通过转轴相连接,使两连杆能够绕固定侧板上的转轴转动,从而达到抬升碗篮的目的;在固定侧板A7上面有两个对前连杆A4限位的凸起,所以两连杆只能在0°~90°范围内逆时针转动;这是一个平行四边形的四连杆机构,所以在转动的过程当中,两连杆始终保持平行,固定侧板A7与外侧轨道A3始终保持平行,所以转动过程中外侧轨道始终保持水平状态。
如图4所示,在前连杆A4的固定轴与后连杆A5中点之间放置一个恒力弹簧A20,能够在抬升过程在下降过程中进行缓冲[11]。
3.3 自锁限位以及释放机构
自锁限位机构如图6和图7所示,图中:A8为限位滑块,A9为滑轨,A10为限位滑块后侧的限位弹簧,A10可以帮助限位滑块复位,A11为限位弹簧的固定套,A15为释放块,A15可以拉动限位滑块在滑轨上运动。图6中四连杆是处于竖直状态,碗篮处于低位,自锁限位机构处于初始状态,限位滑块A8与A4后连杆上的突出平台A4-1接触,限制后连杆的转动。图7为四连杆处于水平状态,碗篮处于高位,自锁限位机构处于终止状态,前连杆A5上的限位销A5-1进入限位滑块A8的限位槽中,锁死四连杆,使抬升机构不会回落。
释放机构主要由两部分组成,分别为门上部分(如图8)和滑轨部分(如图9)所示。图中:A6为门把手,A18为钢丝绳,钢丝绳两端分别固定在释放按压板A23和释放块A15上,A21为钢丝绳轴承,A22为按压版复位弹簧,A23为释放按压板,A16为释放块复位弹簧,A8-1为限位滑块下方的伸出部分。用户在使用释放机构时,按下释放按压板A23,通过钢丝绳拉动释放块A15,进而通过限位滑块A8下方的伸出部分A8-1拉动限位滑块A8,最终限位销A5-1与限位滑块A8分离,释放机构动作完成,四连杆抬升机构可以进行复位[12]。
4 动力学仿真分析
基于SOLIDWORKS建立了消毒柜碗篮抬升机构的三维模型,并把模型导出为PARASOLID格式导入到ADAMS仿真环境中转化为虚拟样机模型,并建立动力学模型受力情况。恒力弹簧的拉力可分解为水平方向和竖直方向两个分力,初始位置时水平方向的分力会对平行四边形抬升机构施加一个力矩,该力矩使得平行四边形抬升机构产生正向转动的趋势,该趋势的方向正是将碗篮抬升至最高位置的方向[13]。本文设置的平行四边形升降机构驱动的转动速度为5°/s,整个抬升过程是一个匀速平衡上升的过程。
分别对有/无恒力弹簧作用时的模型进行动力学分析,获得碗篮在抬升过程中所需要的驱动力(即人力)的变化曲线,如图10所示。初始位置时驱动力矩有一个初始值,这部分力矩值是克服恒力弹簧对平行四边形抬升机构施加的力矩,从而使得整个层架抬升机构是处于受力平衡的,并且从0°至15°左右整个机构都是处于一个匀速上升的状态。当抬升角度大于15°后,恒力弹簧提供的力矩不足以使碗篮上升,此时驱动力矩反过来提供一个力矩,进而使得整个抬升机构仍然处于一个受力平衡的状态,并且使得碗篮继续保持匀速上升的状态。故有恒力弹簧时驱动力矩值会有一个符号的改变,本文中力矩的负值仅与驱动的方向有关,力矩的大小与力矩绝对值相对应。此外,有恒力弹簧的驱动力矩的最大值为15N•m左右,相对于无恒力弹簧时最大力矩值为23N•m左右,有恒力弹簧情况下需要的驱动力矩更小,这是因为减小的那部分力矩由恒力弹簧提供,这样便达到了省力的作用,从而验证了恒力弹簧模型设计的合理性。
5 结语
本文设计提供了一种家用消毒柜碗篮的抬升机构,能够有效抬升家用消毒柜下层碗篮的高度,并且能够为碗篮的抬升过程提供助力,避免用户在使用家用消毒柜时长时间弯腰,丰富了家用消毒柜的功能性,提升了家用消毒柜的用户体验性。
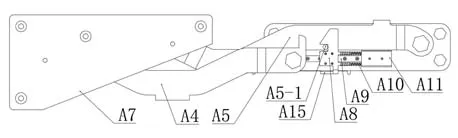
图7 限位机构状态Ⅱ
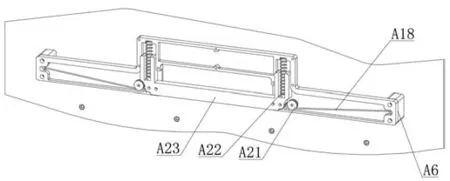
图8 释放机构门上部分

图9 释放机构滑轨内侧部分
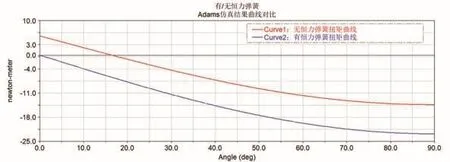
图10 有/无恒力弹簧Adams仿真结果曲线