3D船舶阀门遥控和液位遥测系统
2018-10-31陈小玉李常青
罗 农,陈小玉,李常青
(1.中交第二航务工程局有限公司,武汉 430040;2.上海伟鸿机电设备工程有限公司,上海 200136)
0 引言
随着科技的不断发展,我国不断需要建设港口、桥梁,半潜驳(船)这类大型工程船应运而生。特种工程船的阀门遥控和液位遥测系统是整船的关键系统之一,因而对其性能及自动化的要求较高。某10 000 t半潜船的阀门遥控和液位遥测系统的硬件先进且高度集成、软件高度优化且实用,其拥有人性化电脑操作可视化界面和更加安全可靠的系统。本文介绍了此系统的硬件和软件选型,该系统经设计、安装,在实船上运行稳定可靠。
1 系统硬件配置设计
阀门遥控和液位遥测系统主要由远程遥控计算机、模拟控制板(MIMIC)、中央处理器及采集模块、电液式执行器和液位传感器组成[1-3],如图1所示。
1.1 电液式遥控蝶阀
电液式执行器选用德国普莱格(Pleiger)EHS系列,EHS电液系统是一个集液压和电子技术于一体,兼有两种动力系统优点的电子液压驱动系统。电液式执行器技术先进、动力大、安全稳定,由于无需敷设液压油管及接头,所以具有结构紧凑、安装维护方便、泄漏少等优点。此外,每个阀门都具有独立的电-液单元,即使有一处损坏也不影响其他阀门的使用。通过更换备件可以快速解决故障,从而提高了整体系统的稳定性。
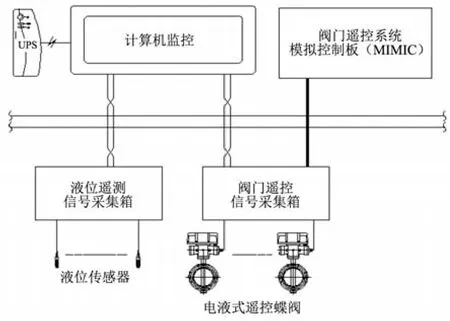
图1 阀门遥控液位遥测系统图
EHS系列执行器的自控系统包含了PVK线性驱动头及装在驱动头上的电子液压动力单元。EHS驱动头由控制模块EHS-CM控制。EHS-CM可以在本地控制,也可与通讯模块连接实现电脑远程遥控。EHS电液式执行器外形及原理如图2所示。

图2 电液式执行器的外形图及原理图
1.2 液位传感器
液位传感器输出4 mA~20 mA标准电流信号,传感器安装于压载水舱及四角吃水。液位传感器的核心部件选用了霍尼韦尔传感器(迟滞0.01%,精度0.5%)。这款WHYL-S型液位传感器具备良好的耐腐蚀性、线性和迟滞性,其适用温度范围广,特别适用于船舶压载水舱液位测量及船舶四角吃水测量。
1.3 中央处理器及采集模块I/O(安装于采集箱)
中央处理器(Central Processing Unit,CPU)模块由近300多点数字量输入、近70点模拟量输入、71个阀门(39只开关阀,32只开度阀)的控制、2台西门子中央处理器PLC315PN/DP及相应的扩展模块组成。PLC作为从站,采集模块采用分离式站点,通过RS485接口连接,使用MODBUS RTU协议通讯。采集模块选用8块6ES7331模拟量输入模块、10块6ES7321数字量开关量输入模块、5块6ES7322数字量输出模块,模拟量模块采集压载舱的液位数值及阀门开度信号,数字量输入模块/输出模块控制阀门的开关及显示阀门的运行状态。
1.4 电脑监控机,模拟板控制
计算机监控机基于PC,使用Windows 7操作系统、串行通讯接口及MODBUS RTU通讯协议,系统安装阀门遥控及液位遥测系统船用监控软件。图 3为计算机阀门遥控MIMIC控制板,阀门与管系一一对应、液位测量与设计的舱室一一对应,图示清晰明了,便于操作。
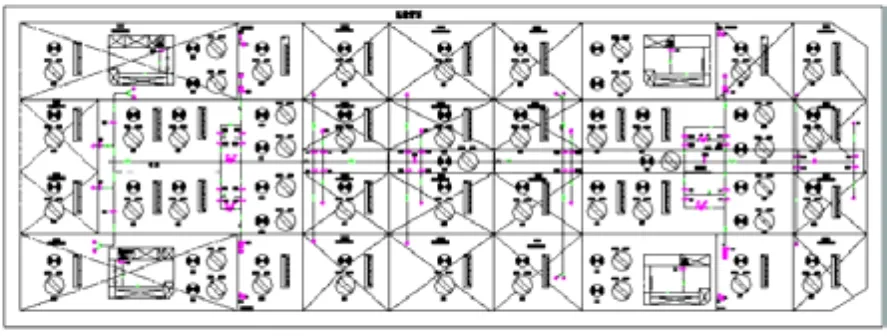
图3 阀门遥控系统MIMIC控制板
2 阀门遥控系统程序软件设计
2.1 船用阀门遥控系统可视化软件设计
软件开发平台基于 Windows 7操作系统,使用Visual C++语言进行编译程序设计[4]。可视化界面采用层次化、模块化设计。电液式阀门遥控系统由PLC逻辑控制器与电脑监控机之间通过通讯电缆连接而成,电液式执行器由液压动力单元、阀位指示器和控制模块集成,通过电缆把电液式阀头信号传输给电脑监控机,电脑监控机发出指令控制PLC,PLC接受指令后,控制遥控阀的开、关及阀门开度。用鼠标点击图 4所示菜单界面,就能看到软件的功能。

图4 阀门遥控液位遥测系统菜单
2.2 阀门遥控系统可视化软件典型界面介绍
1)点击菜单上的“压载管系”(F8),界面上就会显示压载管系对应的遥控阀,同时能显示每个舱对应的液位值,阀门遥控液位遥测系统监控界面如图 5所示。

图5 阀门遥控遥测系统监控界面
2)点击菜单上的“扫舱管系”(F9),界面上就会显示扫舱管系对应的遥控阀,阀门遥控扫舱管系遥控界面如图6所示。

图6 阀门遥控扫舱管系遥控界面
3 液位遥测系统程序软件设计及液位传感器采样原理
软件开发平台基于 Windows 7操作系统,使用Visual C++语言进行编译程序设计[4]。可视化界面采用层次化、模块化设计。每个压载水舱配置一个液位传感器,液位传感器通过压力变送器感测液位的变化,并将压力值转化为4 mA~20 mA的输出信号,信号传输给PLC后,由PLC发送给电脑监控机,再通过上位机软件实现可视化,操作者可以通过可视化软件观察每舱的液位值和液位报警状态。
吃水传感器安装在船的四角,吃水传感器通过压力变送器感测液位的变化,并把压力值转化为4 mA~20 mA的输出信号,信号传输给PLC后,由PLC发送给电脑监控机,再通过上位机软件实现可视化,操作者可以通过可视化软件观察四角吃水的数字,同时也可以观察船舶纵横倾及报警状态。
液位遥测可视化软件典型界面介绍如下。
1)点击菜单上的“液位”(F5),界面就会显示每舱对应的液位值。液位高于舱高的95%时发出高报警,液位高于舱高的 98%时发出高高报警。液位遥测系统独立液位显示界面如图7所示。
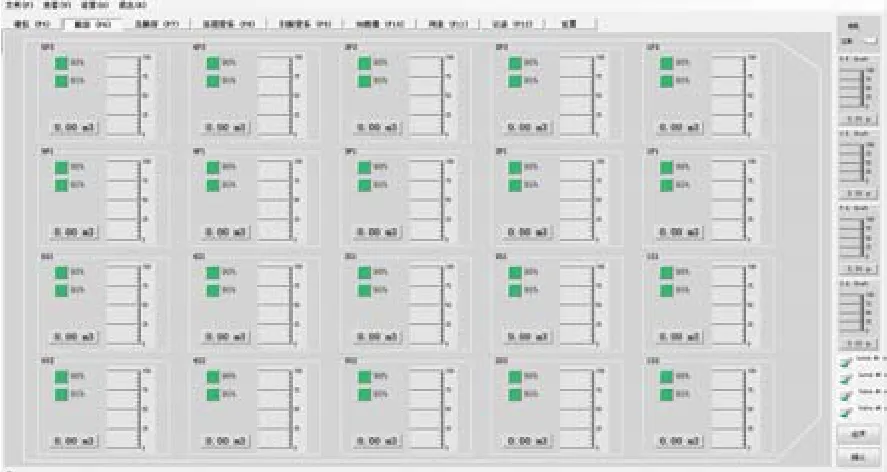
图7 液位遥测系统独立液位显示界面
2)点击菜单上的“吃水”(F7),界面就会显示四角吃水、纵倾角度和横倾角度。此外,通过分析前、后压载水的舱容值,操作者可以掌握整船压载水分布状态。当系统发出声、光报警时,船员不能再压水,需要观察实船情况再做下一步工作,以保障安全。“总舱容”界面如图8所示。

图8 “总舱容”界面
3)点击菜单上的“3D图像”(F10),就能立体、直观地显示船舶动态。船舶3D界面是使用当今流行的3D动态软件设计的。3D图像界面如图9所示。
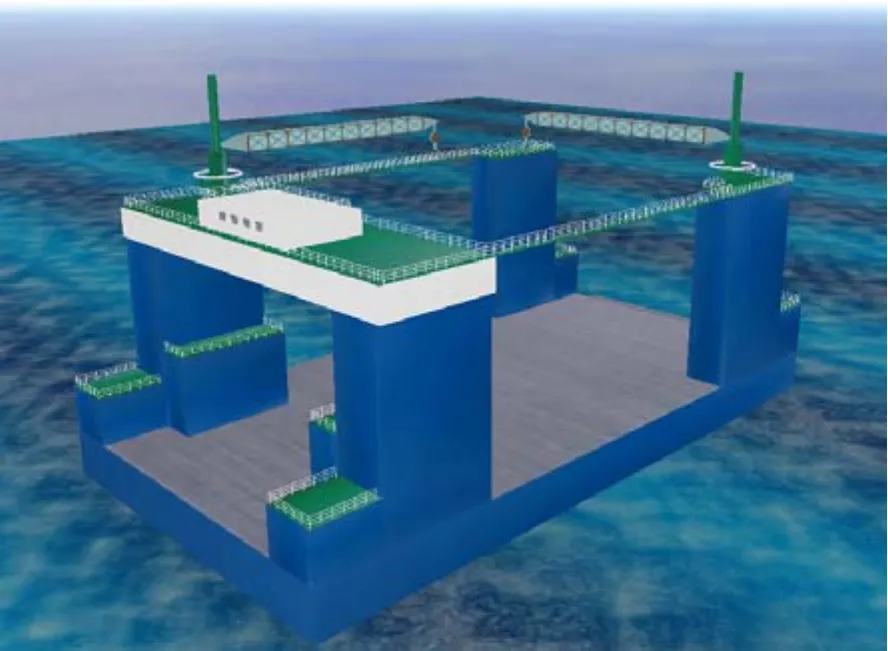
图9 3D图像界面
4 系统冗余和优越性
船用阀门遥控系统采用电液式执行器及模块分离采集控制,通过电脑监控机和MIMIC板两种方式实现远程控制冗余。电脑监控机通过通讯线控制阀门的开关和阀门开度;MIMIC板通过硬线直接接入阀门遥控台,通过旋钮控制阀门的开关和阀门开度。如一种模式出现故障,可以用旋钮切换到另一种模式。这种设计提高了安全性、可靠性。
船用液位遥测系统包含2套独立的S7-CPU315 2 PN/DP,一台CPU做主控,另一台备用。正常情况下,主控 CPU用于执行液位数值监控及报警,备用 CPU仅用于存储数据。一旦主控CPU发生故障,则备用CPU自动切换为主控CPU,主、备CPU在此过程中都存储数据。这样设计的系统可靠性及安全性较强。
5 西门子PLC程序功能设计
编程软件选用SIMATC Manager STEP7 VERSION 5.5,其编程功能块、语句表、编程语言的逻辑缜密、语言简洁[5]。系统采用标准化通讯接口和标准化通讯协议[6]。
PLC采用定时采集数据、循环嵌套的模式。PLC为从站,PC为主站,PC机接收PLC采集的数据(模拟量、开关量信号),PC可以根据采集的数据向 PLC发送指令,控制遥控阀的开关和阀门开度。在工况出现异常的情况下,可以使用面板切换旋钮至MIMIC板,或锁定状态以防误动作。
6 结束语
半潜船的阀门遥控和液位遥测系统是整船关键而又基础的装置,这两个系统的选型、设计、安装也备受船厂的关注。文章介绍的系统在实船上运行稳定可靠,此系统也可以通过因特网4G技术实现远程控制,充分体现船舶自动化的发展方向。
