基于状态估计的虚拟应答器捕获方法研究
2018-10-31蔡伯根陆德彪
刘 江,蔡伯根,王 剑,陆德彪
(1.北京交通大学 电子信息工程学院,北京 100044;2.北京市轨道交通电磁兼容与卫星导航工程技术研究中心,北京 100044)
随着世界范围内卫星导航系统的迅速发展,将卫星定位技术用于铁路运输系统已逐渐成为一个重要的发展方向。近年来,美国、欧洲对GPS、GALILEO系统在列车运行控制及铁路信号领域的应用开展了大量工作[1-2]。 以增强型列车控制系统ITCS(Incremental Train Control System)为代表的低成本列车控制系统已在美国、澳大利亚以及我国青藏铁路等得到实际应用。欧洲针对低成本运营需求提出ETCS-LC(European Train Control System-Low Cost)计划[3],旨在采用卫星定位面向高速铁路以外的主要线路及低密度线路实现低成本列车控制,对ETCS框架形成延伸。此外,美国PTC[4]、法国Atlas400[5]、俄罗斯Klub-U[6]等系统的开发以及位于Sardinia的基于卫星定位的列控试验段的示范实施[7],极大促进了卫星导航在列车控制等安全领域的实质性应用,形成了重要的产业推动力。
卫星定位设备能与轨道信息相结合实现一维列车定位,然而,将其用于列车控制系统面临的首要难点在于如何满足列控系统对安全的苛刻需求。由于卫星定位在空间段、信号传输、用户端等可能面临诸多导致性能恶化甚至功能失效的因素,单一依赖卫星导航系统实现列车测速定位无法始终在精确性、连续性、可用性等方面满足列控系统需求,进而保障列控系统的安全性。为合理引入卫星定位技术,同时尽可能降低卫星定位可能面临的安全风险以及对现有系统体系的异化程度,欧洲提出虚拟应答器VB(Virtual Balise)的概念,旨在形成一种基于卫星定位且与既有ETCS规范相兼容的列控系统方案。作为一个车载列控系统的模块,虚拟应答器利用卫星定位、辅助传感器及轨道地图确定列车运行状态,替代物理应答器向车载设备发送报文信息,从而以高自主性实现列控系统成本的有效降低。
近年来,国外开展了一系列针对虚拟应答器的研究开发工作,在系统方案及性能需求[8]、定位单元初始化逻辑[9]、定位信息融合[10]、用于ETCS的安全性评估[11]、系统试验验证[12]等方面取得了一些进展。国内对虚拟应答器的研究仍处于起步阶段,在我国下一代列控系统NGTC(Next Generation Train Control)方案中开始引入虚拟应答器技术进而将卫星定位引入列车控制过程,然而,目前我国在虚拟应答器的核心机理,特别是虚拟应答器信息处理、捕获识别、安全判别等方面,仍未形成成熟的技术体系。捕获作为实现应答器功能的关键步骤,常规的基于捕获半径的几何判别方案[13-14]采用确定的捕获空间范围与计算所得列车位置进行空间从属性关联,识别列车当前是否通过应答器所在位置,并决定是否将该应答器标记为已捕获状态,此类方法实现简便,但存在固定捕获半径在不同的列车速度、运行条件下的重复捕获、漏捕获等问题。对基本的捕获方法提出的一些改进方案,如根据列车运行速度、卫星定位接收机输出频率动态调整捕获半径[15],考虑定位计算误差的捕获识别[16],结合统计测试的捕获及列车通过状态判别方法[17],在一定程度上考虑了捕获率的保障以及定位误差对捕获性能的不利影响。然而,现有的捕获方案未能全面考虑对捕获性能的优化,并未将捕获计算与定位误差校正、应答器报文触发等功能进行紧密结合,从而应对复杂现场条件的应用需求。为此,本文对常规的虚拟应答器捕获思路进行改进,将捕获判别与列车定位计算过程进行结合,同时确保捕获的时间灵敏度、识别正确率,并防止漏捕获、重捕获的发生,对有效应用虚拟应答器模式实施列车运行控制具有重要意义。
本文对常规基于捕获半径判别的虚拟应答器捕获方法进行了改进,建立列车与目标虚拟应答器相对运动态势的状态空间模型,引入状态空间估计思想,提出一种基于状态估计的虚拟应答器捕获判决新方法,并利用现场数据对该方法进行验证与分析。
1 虚拟应答器概述
虚拟应答器的定义可以用真实应答器为基础通过比较而确定。欧洲结合ETCS现有体系规范,对虚拟应答器进行定义如下[18]:虚拟应答器是ETCS车载设备的一个附加装置,它利用卫星导航接收机等设备提供的列车定位信息与预定轨道参考点(应答器)进行比较,在确认列车经过应答器的时刻模拟真实应答器的工作过程并发送报文信息。
为了确保虚拟应答器替代真实轨旁设备实现相应功能,虚拟应答器需完成从位置信息获取到实时发送报文的全过程步骤。完整的虚拟应答器系统结构如图1所示,可以看出,与真实应答器相比,虚拟应答器完全由车载装置构成,无需使用物理应答器等地面设备,避免了车-地无线报文传输过程存在的不确定性。具体来看,其结构主要包括3个模块:
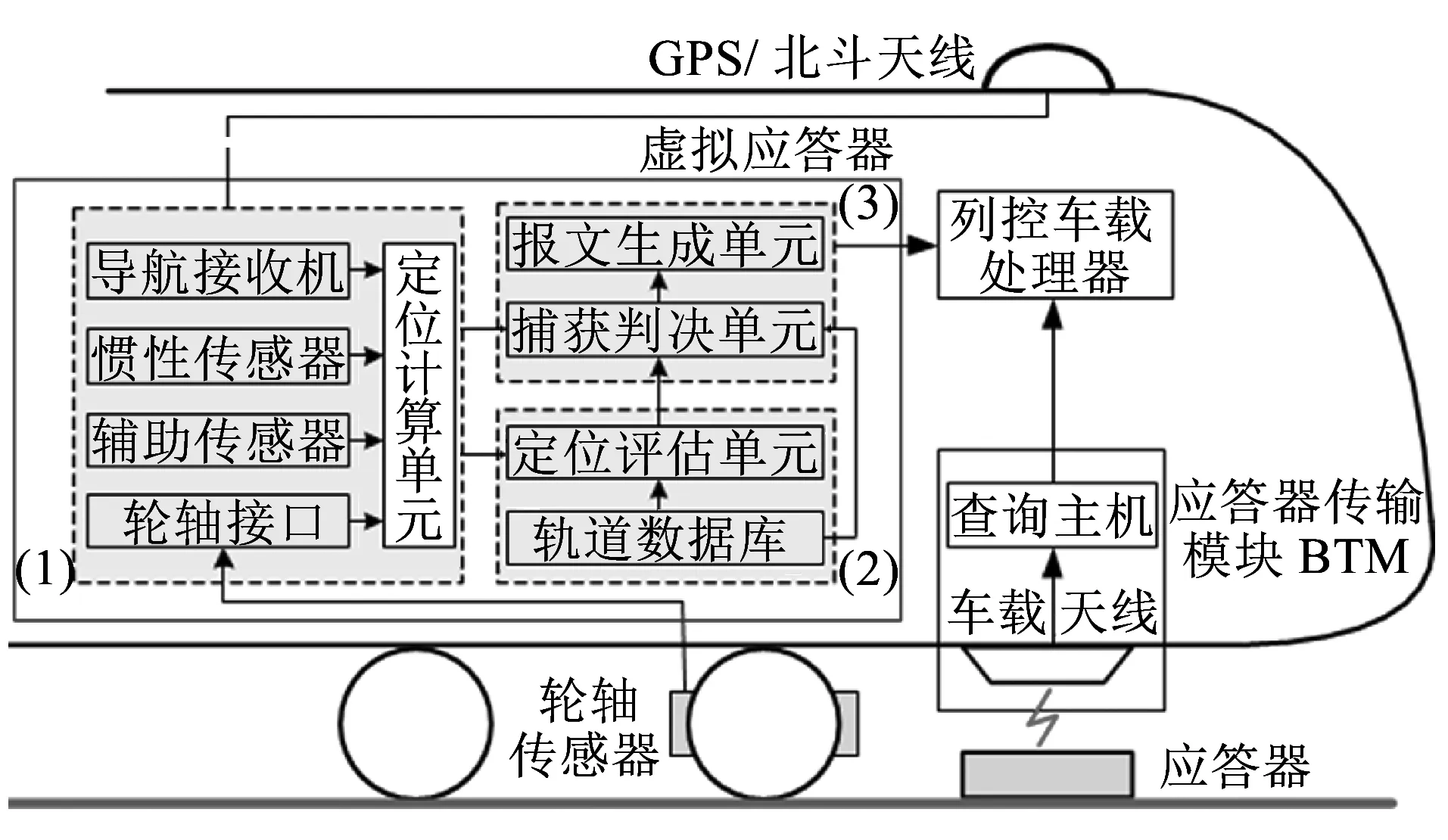
图1 虚拟应答器结构与工作原理示意
(1)定位计算模块:包含定位传感器、定位计算单元,为确认应答器经过状态提供位置信息。可采用轮轴传感器以及惯性传感器等辅助方式与卫星定位接收机共同采集原始测量数据,由定位计算单元进行数据融合计算以及列车位置与状态判别。
(2)诊断评估模块:包含轨道数据库、定位评估单元,为所获得定位计算结果提供质量及有效性的评估和诊断。轨道数据库中存储线路基础数据及应答器分布信息,定位评估单元以轨道数据为参考,评价当前定位质量并决定其能否用于实现虚拟应答器功能。
(3)报文传输模块:包含捕获判决单元、报文生成单元,为列控车载设备提供应答器报文信息。在定位信息有效的情况下,捕获判决单元利用列车位置与轨道数据库中存储的目标应答器位置进行实时比较,在所判定的应答器捕获时刻触发报文生成单元,向车载列控设备发送与真实应答器一致的报文信息。
从功能原理上来看,虚拟应答器的核心特点在于报文来源的取代,并采用软件化处理逻辑代替真实应答器与应答器传输模块BTM(Balise Transmission Module)天线的无线传输,实现报文信息传递。虽然虚拟应答器在理论上能够获得显著的成本效益,但其内部采用的信息处理逻辑是其功能实现及性能水平的决定性因素,也是解决实际应用问题的关键所在。
2 虚拟应答器捕获原理
从虚拟应答器的工作过程可以看出,除了所采用的定位融合计算逻辑、诊断评估方法之外,最终利用定位信息触发报文传输的关键因素在于如何准确确定列车驶过预设虚拟应答器位置的瞬时时刻所完成的这一判决逻辑,称为虚拟应答器捕获(VB Capture),其功能主要由捕获判决单元完成。虚拟应答器捕获的实施条件包括3个方面:
(1)定位计算模块正常计算出列车位置,包括二维平面坐标系下的坐标位置及相应的一维里程;
(2)诊断评估模块判断当前获取的定位信息有效,不存在故障或显著的完好性风险;
(3)捕获判决单元记录已捕获应答器信息,并据此从轨道数据库中提取待捕获的邻近后续应答器NVB(Next Virtual Balise)信息,包括标识、坐标位置等。
虚拟应答器捕获的实施结果主要包括两个方面:
(1)捕获判决单元更新已捕获应答器状态,用于后续时刻运行过程更新捕获目标NVB信息;
(2)捕获判决单元向报文生成单元发送触发信息并提供所捕获的应答器信息,报文生成单元据此完成报文查询、组包以及发送等功能。
虚拟应答器捕获的逻辑机理实质上是一个列车空间位置与预定应答器位置的匹配状态识别问题,图2给出了常规捕获过程在二维空间平面的示意。
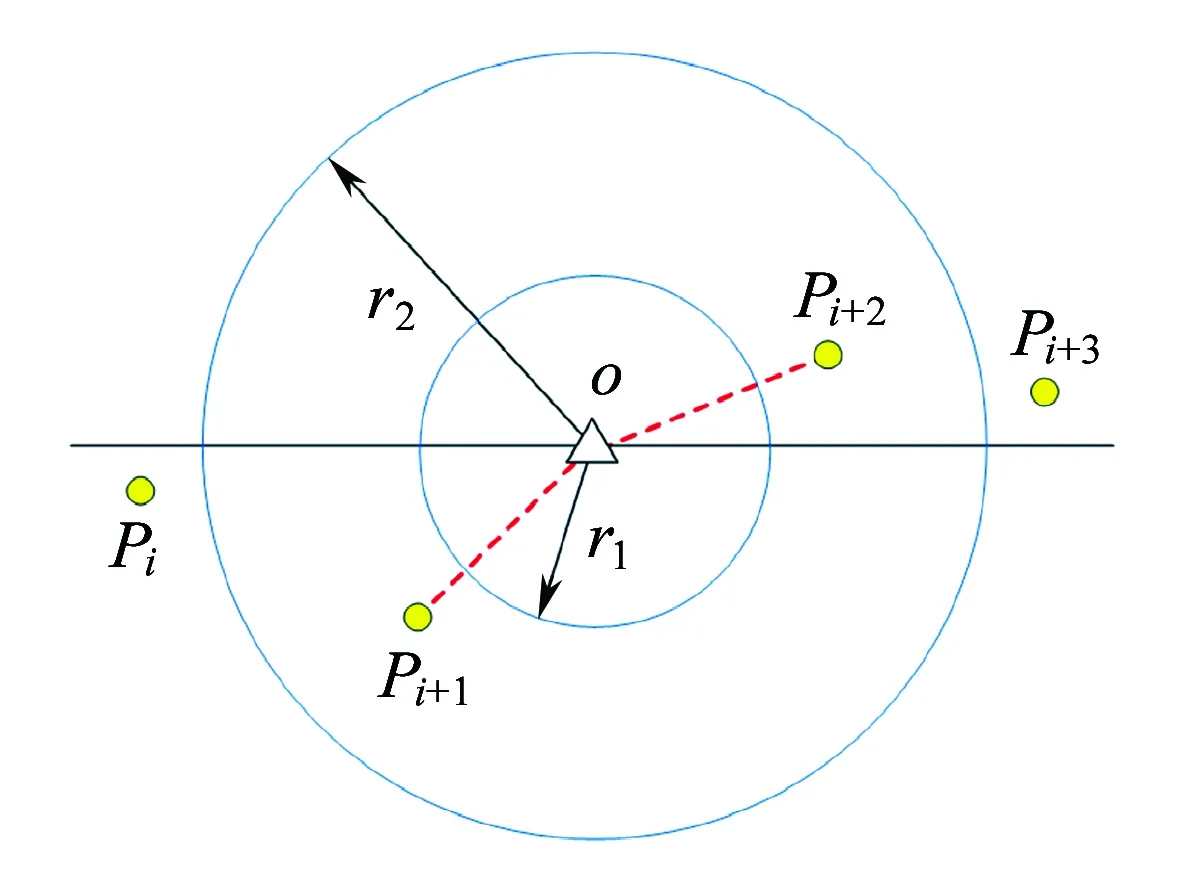
图2 常规虚拟应答器捕获原理
常规虚拟应答器捕获方法采用一种基于捕获半径CI(Capture Interval)的判决原理[18]。在捕获逻辑中预设一个捕获半径值,并据此以应答器位置为中心形成一个确定的捕获区域,通过判断列车定位模块给出的二维位置是否落入该区域,确定捕获状态。图2中的点列{Pi,Pi+1,…,Pi+3}表示所得二维列车位置,以应答器位置O为圆心、rj(j=1,2)为半径的圆形捕获区域可用于在落入该区域时判定该虚拟应答器捕获。
基于捕获半径的判决机制逻辑相对简单,易于软件实现,但采用确定的捕获半径可能导致漏捕获、重捕获等问题。如图2所示,若采用捕获半径r1,在所示定位输出条件下无定位位置落入捕获区域,漏捕获会导致无法触发报文传输;若采用半径r2,则同时有多个定位位置落入捕获区域,对捕获状态的确认带来了模糊性。此外,从捕获空间精度(由捕获残差衡量,如OPi+1的欧氏距离)来看,捕获识别时刻与列车实际经过应答器位置的时刻仍存在一定偏差,捕获半径越小,相对而言捕获精度越高,但漏捕获风险增大;半径越大,捕获精度下降的概率增高,确认捕获结果的不确定性增大。为尽可能避免漏捕获、重捕获,需对捕获半径进行修正并增加额外的防护逻辑[14]。然而,在确定半径条件下的捕获精度与重捕、漏捕风险仍难以有效调和,并且这种单一的判决逻辑未深入利用定位信息以及诊断评估信息的辅助能力。基于此,本文引入状态估计方法用于实施捕获,从信息利用深度的角度消除对捕获半径这一条件的依赖,提升捕获性能。
3 基于状态估计的捕获算法
(1)uj=0,表示该虚拟应答器未被捕获;
(2)uj=1,表示该虚拟应答器已被捕获;
(3)不考虑漏捕获的情况下,状态序列满足一定的顺序关系,即若最新被捕获的应答器编号为j,则uj=1,且u1=…=uj-1=1,uj+1=…=uN=0;
(4)任一时刻的待捕获目标为NVB,即尚未捕获的最邻近后续应答器,根据(3)所示取值,NVB为第j+1个应答器。
以NVB的位置信息为依据,包括其经度λj+1、纬度φj+1、轨道里程sj+1,虚拟应答器的捕获过程实际可描述为列车向NVB运行过程中的时空对准问题。假定列车在k-1时刻未判定NVB捕获,则在当前时刻从定位传感器获取测量信息后,可将常规模式下相对独立的定位计算与捕获判决进行结合,引入状态估计思想,在位置预测与估计过程中确定列车位置与NVB对准的时间度量。仅考虑列车在二维平面坐标系中的动态,以列车东向位置xk、北向位置yk与NVB位置的差值及其一阶、二阶导数构成待估状态向量。
(1)
ek=xk-xj+1
(2)
nk=yk-yj+1
(3)
式中:ek、nk分别为二维位置差值;(xj+1,yj+1)为NVB经纬度(λj+1,φj+1)转换所得的二维位置。
以卫星定位接收机输出的经纬度坐标转换为二维位置(xk,yk)以及轮轴传感器输出的速度vk构建量测向量,同时辅以由k-1时刻地图匹配所得航向角θk作为虚拟测量信息,量测向量可表示为
yk=[xkykvkθk]T
(4)
为了实现列车向NVB运行状态的估计,结合上述状态向量、量测向量定义构建系统及量测模型为
xk=Φk|k-1xk-1+wk
(5)
yk=h(xk,k)+εk
(6)
式中:Φk|k-1为描述状态量从k-1时刻至k时刻的转移矩阵;h(*)为描述量测向量与状态向量关系的量测函数;wk、εk分别为系统误差及量测误差向量,通常假定为高斯噪声且方差为Qk、Rk。
根据状态量的定义可知,状态量从k-1时刻至k时刻的转移服从一定的列车运行动力学规律。采用常加速模型可知,若
(7)
(8)
则可知位置差值及其一阶导数的关系为
(9)
(10)
(11)
(12)
式中:T为滤波计算周期;wk=[wk,1…wk,6]T。基于此,可得式(5)所示系统模型的具体形式。
根据量测信息的物理意义可知其分别与状态量之间的关系,(xk,yk)与(ek,nk)的线性关系可由式(2)、式(3)得出,速度vk、航向角θk量测模型可描述为
(13)
(14)
由此可确定式(6)所示量测模型的具体形式。每当获得卫星导航接收机、轮轴传感器观测信息,依据系统与量测模型,可进行滤波计算,对列车朝向NVB运行的状态进行估计。为了有效确定列车实际经过NVB的确切时刻并对NVB属性进行适时更新,将常规滤波器设计中的时间更新、量测更新过程进行调整,在每个计算周期将量测更新结果进行基于时间的前向预测,从而对NVB进行对准时刻估计,完成NVB信息更新,并进行滤波器校正。
具体来看,本文所述的虚拟应答器捕获逻辑伴随着列车运行状态估计过程,可分为4个步骤:
步骤1初始化

步骤2量测更新计算
(15)
i=1,2,…,m
(16)
Zi,k|k-1=h(Xi,k|k-1,k)
(17)
(18)
(19)
(20)
(21)
(22)
(23)
式中:{ξi}为一组m个sigma点集,且m=2n,n为状态量维数。

步骤3匹配预测计算
(24)
(25)
(26)
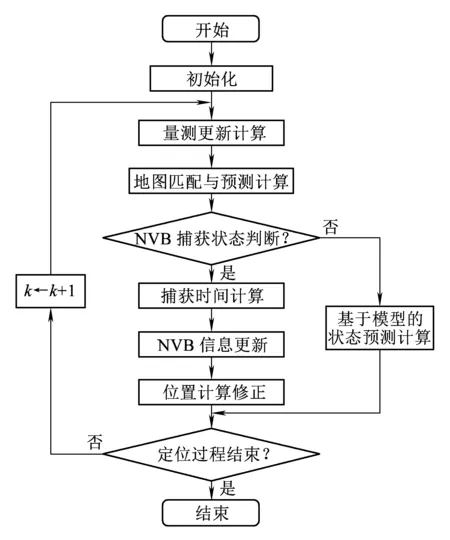
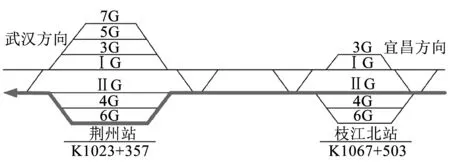
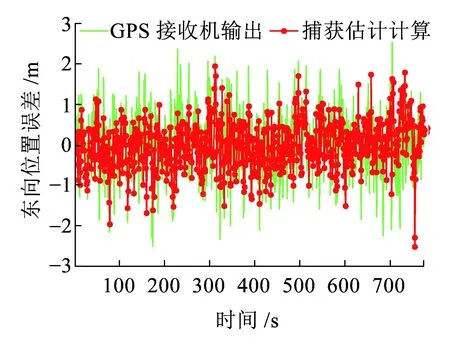
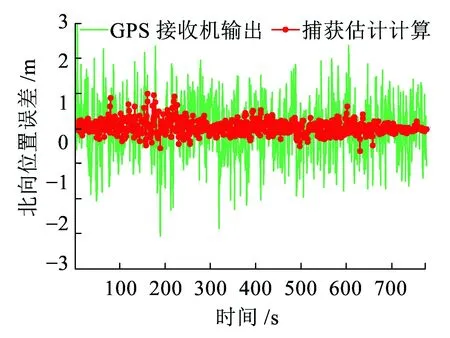
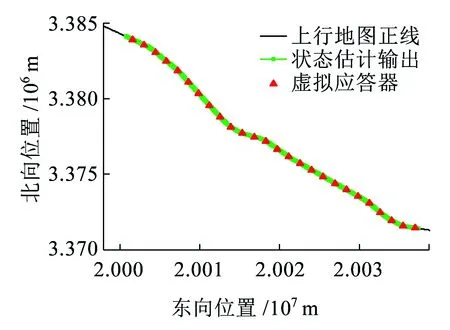
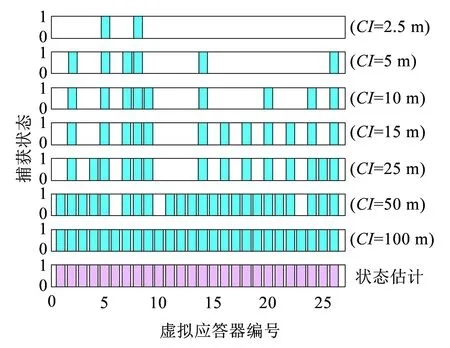
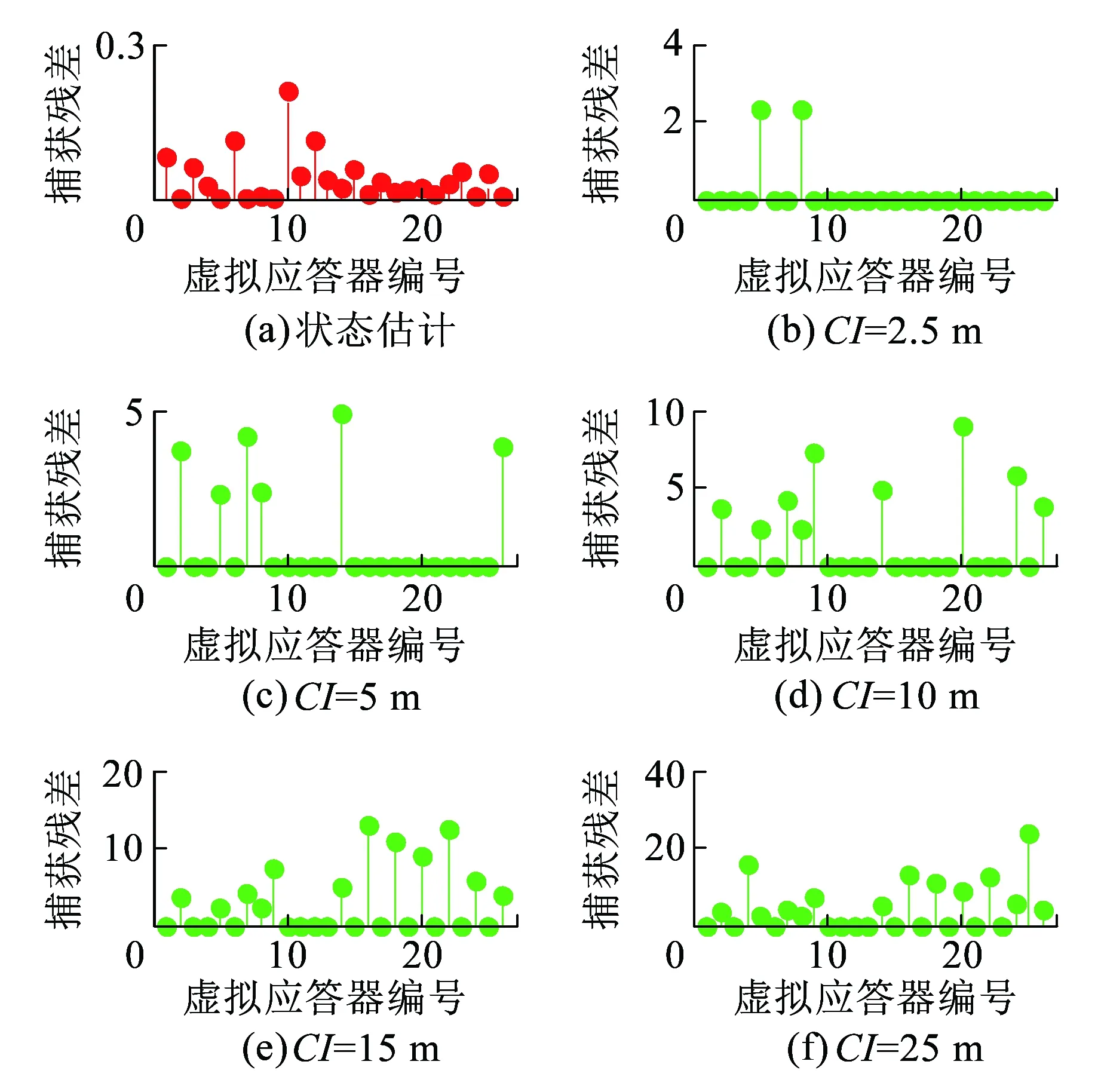
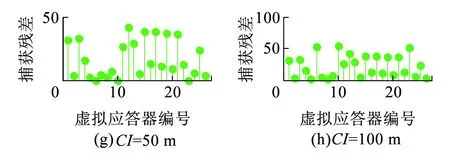
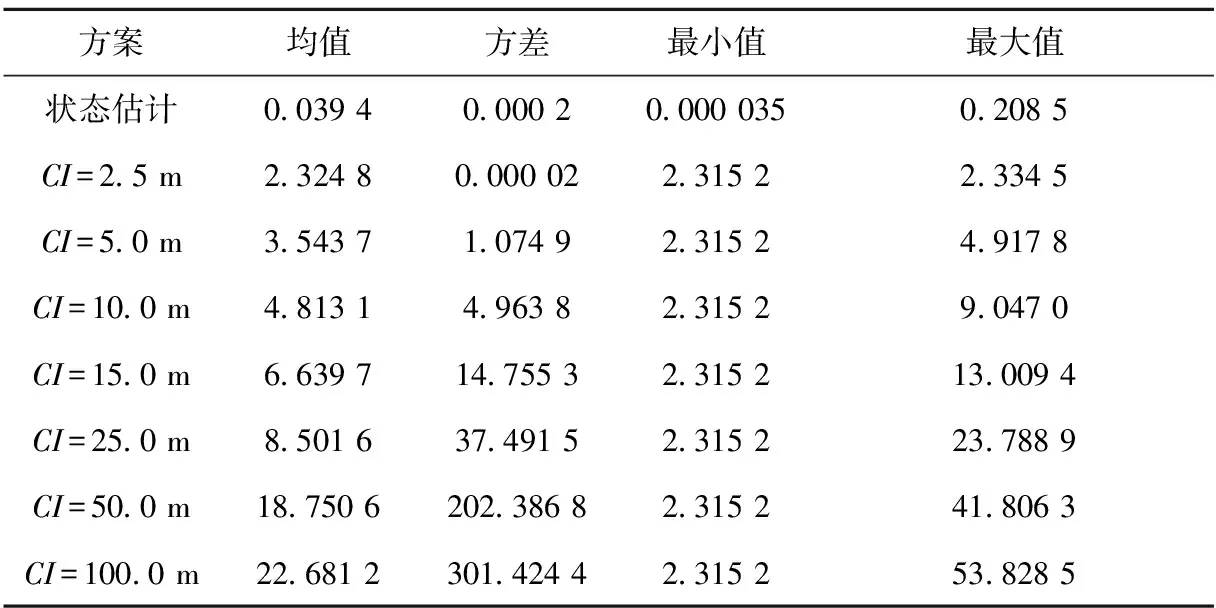
式中:(xF,yF,sF)、(xE,yE,sE)分别为所选取地图片段两个端点的坐标及里程,如图3所示地图关键点PM1、PM2,一般取sF (27) lC=yE-lAxE (28) 图3 基于状态估计的虚拟应答器捕获原理 步骤4捕获判别更新 (29) 根据式(29)进行虚拟应答器捕获判别的结果,可分别进行如下两类操作: (1)若NVB判定为被捕获 先后完成捕获时间确定、NVB信息更新、位置计算校正等操作,对下一周期捕获判别状态估计的基准值进行修正,并修改目标NVB参照信息。 更新NVB信息:将虚拟应答器序列里第j+1个VB标记为已捕获,即uj+1=1。若列车运行方向与应答器编号增方向同向,则下一周期取j=j+1,即以第j+2个应答器为目标NVB,且uj+2=…=uN=0。若运行方向与应答器编号增方向反向,则j=j-1,即设定第j个为NVB。相应地,更新后的NVB位置信息用于构建状态量并进行后续捕获计算。 (2)若NVB判定为未捕获 (30) (31) 式中:Pk+1|k为一步预测方差矩阵。 上述基于状态估计的虚拟应答器捕获方法涉及4个步骤的描述,可进一步通过图4所示的处理流程对虚拟应答器捕获过程进行总结。 图4 常规虚拟应答器捕获原理示意 与常规基于捕获半径的虚拟应答器捕获方法进行比较,本文所提出的状态估计捕获判别方法具有以下几方面显著区别及典型特点: (1)由于引入了状态估计过程,捕获逻辑能够采用对后续时刻的状态预测来预判列车与虚拟应答器的接近状态,从而有效避免漏捕获、重捕获,提升了虚拟应答器的捕获率及捕获可靠性水平。 (2)在虚拟应答器的捕获判定过程中引入轨道电子地图先验信息,增加了对列车定位传感器观测信息、轨道地图信息的综合利用深度,有利于提升定位性能与捕获精度,降低捕获残差水平。 (3)利用状态估计结果以及列车运行动态模型进行预测,能够给出更高分辨率水平的捕获时间估计,用于确定虚拟应答器报文发送功能的具体触发时机。 在采用卫星定位实现虚拟应答器过程中,不可避免会遇到导航卫星信号受到遮挡、干扰,导致卫星定位功能失效的情况,为了确保虚拟应答器捕获功能的连续性,可在卫星定位失效情况下采用降级策略,依据辅助传感器(如轮轴速度传感器等)推算位置以及固定捕获半径继续完成捕获判断,直至卫星定位恢复正常,从而尽可能充分发挥本文所述捕获方法的作用。 本文采用2012年6月于汉宜铁路进行现场试验采集的定位数据对本文所述虚拟应答器捕获方法进行测试和验证。所选取测试区段为“枝江北—荆州”上行区间约44 km的线路(测试动车组运行计划及列车进路如图5所示),以车载试验设备所含Ashtech MB100型GPS接收机在差分定位模式下的日志数据作为基础,通过Spirent GSS8000型卫星导航模拟器回放与地图匹配获得列车在轨道坐标系的位置及运行速度,构成定位参照基准,并在基准量中叠加高斯白噪声(东向位置、北向位置、速度标准差分别为0.87 m、0.81 m、0.11 m/s)模拟GPS接收机、脉冲速度传感器的测量结果。 图5 测试区段内列车运行计划及进路 采用汉宜铁路卫星定位试验过程中采集制作的轨道电子地图数据库用于列车定位计算及虚拟应答器功能的实现。在测试区段内按照1.5 km固定间隔共设置26个虚拟应答器,以轨道地图数据库上行方向正线关键点信息为参照,提取轨道信息,计算并生成虚拟应答器数据库,包含各虚拟应答器的编号、二维平面坐标位置、里程、轨道方向等字段信息。 利用上述仿真场景及数据,按照本文所述方法进行虚拟应答器捕获判定计算,本章从3个方面对虚拟应答器捕获方法所得性能进行验证与分析。 在本文所述捕获方案下,列车定位计算与虚拟应答器捕获过程已集成为一体,因此,首先对采用状态估计的捕获方法所得列车定位精度与GPS接收机定位结果进行比较,结果如图6、图7所示,列车定位轨迹如图8所示。可以看出,由于在捕获过程中引入状态估计以及轨道地图信息,列车定位误差与GPS接收机直接测量相比得到了明显抑制,东向位置误差方差降为GPS接收机结果的61.13%,对北向位置误差方差的抑制作用更为显著,低至6.59%。东向、北向误差抑制效果的差异主要由列车运行方向决定,测试区段航向基本为正东偏南方向(航向角均值108.35°),导致轨道地图在垂直轨道方向(近似北向)的误差抑制作用较沿轨道方向(近似东向)更为明显。 图6 东向定位误差比较 图7 北向定位误差比较 图8 列车运行轨迹及虚拟应答器位置 总体来看,从实现虚拟应答器功能角度而言,本文所述方法一方面利用卫星定位结果实现了虚拟应答器的捕获判定,另一方面,基于状态估计及虚拟应答器校正也实现了列车定位计算,与直接采用卫星定位接收机输出结果相比,取得了更优的定位精度水平,为实施其他列控车载设备功能提供了基础。 为了验证本文提出的基于状态估计的虚拟应答器捕获方法的捕获性能,选取基于固定捕获半径的捕获方法[18]进行对比,捕获半径CI分别选用7个典型值(2.5,5,10,15,25,50,100 m),如此,与基于状态估计的捕获方案共构成8组捕获计算操作,分别进行虚拟应答器的捕获判定。图9给出了8个不同捕获方案下全部26个虚拟应答器的捕获状态判定结果,其中,纵轴的数值定义同捕获状态序列,0表示未捕获,1表示被捕获。由图9结果可以看出,不同捕获半径方案下的捕获识别率与CI值呈正比关系,对应上述7个典型值按7.69%、23.08%、34.62%、46.15%、53.85%、88.46%、100%逐步递增。相应地,图10给出了不同捕获方案下的捕获残差值,其中,固定CI方案的捕获残差是指判定捕获时列车位置与NVB的欧氏距离,而对于基于状态估计的捕获方案,由于采用了状态预测来确定列车经过NVB的准确时刻,捕获残差定义为用于从地图匹配位置出发计算列车位置预测量过程中的模型误差分量。为了更清楚展示虚拟应答器捕获残差的实际情况,表1给出不同方案下捕获残差的统计信息,通过分析可知,基于状态估计的捕获方法所得捕获残差的均值、方差、最小值、最大值与固定CI方案相比,最多均可取得99%以上的优化效果,捕获残差能够得到显著改善。 图9 不同捕获方案下虚拟应答器捕获状态比较 图10 不同捕获方案下虚拟应答器捕获残差比较 方案均值方差最小值最大值状态估计0.039 40.000 20.000 0350.208 5CI=2.5 m2.324 80.000 022.315 22.334 5CI=5.0 m3.543 71.074 92.315 24.917 8CI=10.0 m4.813 14.963 82.315 29.047 0CI=15.0 m6.639 714.755 32.315 213.009 4CI=25.0 m8.501 637.491 52.315 223.788 9CI=50.0 m18.750 6202.386 82.315 241.806 3CI=100.0 m22.681 2301.424 42.315 253.828 5 虽然采用较大CI值进行捕获能够实现高捕获识别率,但是在上述结果中,可直观得到固定CI方案下存在的漏捕获情况,且同时还存在虚拟应答器被连续若干次判定为捕获状态的情况(重捕获情况),为此,本文在计算过程中对各个应答器在不同方案下的重捕获次数进行了统计,结果如图11所示,其中,捕获方案1表示基于状态估计的捕获,方案2~8分别表示CI递增的7组固定半径捕获方案。为对固定CI捕获方案的捕获性能进行总结,图12给出了漏捕获率、重捕获率的比较结果,其中,捕获率定义为漏(重)捕获VB数与已判定捕获VB数量的比值。为展示细节,图12中横轴对捕获半径采用对数坐标显示。 图11 不同捕获方案下虚拟应答器重捕获结果比较 图12 不同捕获方案下捕获率比较 由以上计算结果可以明显看出本文所述捕获方案与常规固定CI方案的显著差异,总体而言,本文所述方法的捕获性能更优,具体体现在以下几个方面: (1)漏捕获:固定CI捕获方案下,CI的取值大小与漏捕获率之间呈反比关系,考虑边界条件,CI=2.5 m情况下,漏捕获率为92.31%,而CI=100 m情况下的漏捕获率为0,这是由CI的捕获机制这一先决因素所导致,而本文所提出的方法通过引入状态估计及预测,在正常传感器观测条件下确保每一个虚拟应答器均得到准确且唯一的捕获判定,消除漏捕获情况。 (2)捕获残差:固定CI方案的捕获残差与CI取值呈正比趋势。采用状态估计捕获方案所得捕获残差量级远小于固定CI方案,由于位置预测机制的引入,使得实际捕获判定位置与NVB位置之间的偏差得到有效消除,其残差仅由预测的不确定性误差造成,较小的捕获残差表明其捕获空间精度水平的显著提升。 (3)重捕获:固定CI方案下普遍存在重捕获情况,且重捕获概率随CI增大呈增高趋势,在上述CI取值方案下最高可达88.46%。总体而言,固定CI方案下的漏捕获率与重捕获率呈相反趋势,这也显示出两者的相悖性导致其无法调和的问题,即使可采用首次捕获状态锁定等方式避免重捕获判定,但漏捕获的发生以及捕获残差较高的问题依然无法得到解决。相比而言,本文方法采取将定位估计与捕获判决进行集成的策略,从根本特性上避免了这一困境的发生,确保能同时避免漏捕获、重捕获的情况。 (4)捕获可靠性:从上述几个因素来看,本文所述方法能够更为有效地确保虚拟应答器捕获功能在一定时间及条件下得到有效执行,相比于固定CI捕获方案,本文方法具有更高的捕获可靠性水平。 在捕获精度方面,除了上述分析中较为关注的空间属性,考虑到虚拟应答器兼有应答器报文传输的触发功能,虚拟应答器捕获的时间属性同样需要给予相应的关注。常规的基于固定CI的捕获方案仅在获得GPS接收机输出时刻判定NVB的捕获状态,如此则导致虚拟应答器捕获的时间分辨率直接取决于车载GPS接收机的输出频率,而对于列控系统使用虚拟应答器完成列车控制、超速防护等功能而言,捕获判定的时间分辨率水平是决定其应用效能的重要因素。GPS接收机的典型输出率(如常用的1 Hz)无法与相对较小的车载设备计算周期相匹配,特别是在列车高速运行过程中,捕获的时间分辨率失配将导致较大的处理偏差。本文所述方法由于进一步采用状态预测结果进行捕获判定,能够突破卫星定位接收机数据输出频率的限制,实现更高的时间分辨率水平。 图13给出了固定CI方案(选取典型值CI=100 m)与本文提出方法的捕获时间比较,其中,图13(b)、图13(c)分别给出了t=48 s、t=629 s两个时刻附近的捕获结果局部情况(对应的捕获时间差异分别为0.071 1、0.937 6 s)。为区别显示两种方案的捕获状态,分别采用纵轴捕获状态值1、2表示两种方案下虚拟应答器在相应时刻被判定为捕获状态。图14给出了两种捕获方案下所有虚拟应答器捕获判定时间的差值,差值分布于0.036 9~0.983 9 s范围内,平均值达到0.435 3 s,所示结果清楚表明了本文提出的基于状态估计的捕获方法在捕获时间分辨率方面的优势。在时间精度方面,进一步验证了该方法相比于固定捕获半径方案用于确定虚拟应答器报文触发时机的能力,从另一层面反映了本文所提方法在捕获精度、捕获可靠性方面的优化水平,具备更优的实际应用潜力。 图13 虚拟应答器捕获时间比较 图14 不同捕获策略下捕获时间差 本文以基于卫星定位的列控系统应用为背景,提出一种基于状态估计的虚拟应答器捕获方法,引入状态估计及预测过程,利用轨道电子地图信息辅助,将卫星定位/轮轴速度传感器组合定位过程与虚拟应答器捕获过程进行了紧密结合。本文所述方法与常规的基于半径的捕获方法相比,所具备的优势集中在两个方面:在虚拟应答器捕获性能方面,本文所述方法能够有效避免漏捕获、抑制捕获残差、消除重捕获、提升捕获可靠性、改善捕获时间分辨率,取得多方面更为优化的捕获性能水平;在虚拟应答器应用功能方面,能够更为有效地用于实施列车精确定位并适时触发应答器报文用于列车控制过程。本文所得成果将有助于在下一代列控系统的方案设计与系统实现中引入卫星定位,并借助虚拟应答器这一技术途径实现卫星定位技术与既有列控系统模式的有效兼容。 在后续研究中,将进一步关注不同列车卫星定位场景下列车定位与虚拟应答器集成逻辑的完善,特别是对于环境、设备层面可能发生故障的实时检测、诊断与隔离,使之能够在不同列车运行环境、传感器工作条件下具备更优的适应能力。此外,将逐步引入我国北斗卫星导航系统,实现双模、多模卫星定位并完成虚拟应答器功能,深入分析并提出与下一代列控系统特征相适应的轨道电子地图数据库规范,构建完整的基于卫星定位的虚拟应答器技术方案体系。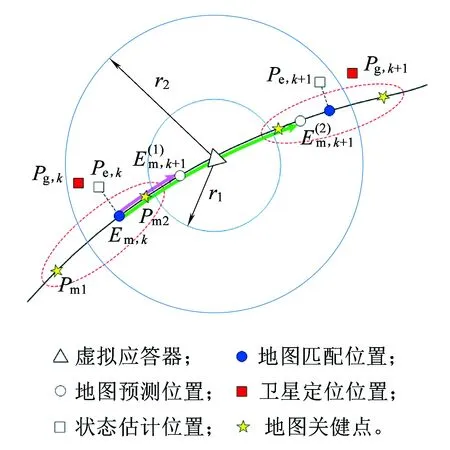



4 验证与分析
4.1 列车定位精度
4.2 虚拟应答器捕获特性
4.3 捕获时间分辨率
5 结束语
