鱼雷活塞式凸轮发动机的智能控制设计
2018-10-31张在炳
张在炳
(中国人民解放军91640部队, 广东 湛江 524064)
引言
鱼雷发动机是推动鱼雷在水下航行的动力装置,鱼雷发动机是鱼雷的主要动力系统,这是一种外燃活塞式凸轮发动机,采用转阀配气方法进行动力驱动,将鱼雷燃料在燃烧室中进行充分燃烧,使用互锁阀驱动发动机的动力装置,将燃料燃烧产生的高温高热燃气作为动力驱动工质,实现鱼雷动力驱动[1]。鱼雷发动机作为一种活塞式的凸轮发动机,在转阀配气和螺旋桨驱动过程中,需要进行发动机的优化动力控制,结合智能控制技术,提高发动机的输出动力和功率,确保鱼雷的稳定运行,研究凸轮发动机的智能控制技术,在鱼雷动力系统设计中具有很好的应用价值。
鱼雷活塞式凸轮发动机的转阀和互锁阀是控制鱼雷发动机燃油进出油量的重要装置,在鱼雷发动机喘振放空阀瞬间产生进油指令,对发动机控制的基础是进行互锁阀转阀控制,结合正反向的旋转双轴控制方法,将燃气热能转变为驱动螺旋桨转动的机械功,并带动海水泵和燃料泵及发动机工作[2]。为了改善活塞式凸轮发动机工况,提高活塞式凸轮发动机的工作效率,本文提出一种基于正反向旋转双轴输出控制的鱼雷活塞式凸轮发动机的智能控制方法。首先构造鱼雷活塞式凸轮发动机控制约束参量模型,发动机采用转阀配齐方法进行燃气热能驱动控制,然后采用锥形滚动轴承转动调节方法进行凸轮发动机的运转工质调节,采用正反向旋转双轴输出调节方法提高发动机驱动机械功,结合单片机进行鱼雷活塞式凸轮发动机的计算机智能控制,最后进行仿真测试,展示了本文方法在提高发动机智能控制能力方面的优越性。
1 发动机的工作原理和结构组成
本文研究的某型鱼雷动力系统所用的发动机采用活塞式凸轮机,采用转阀配气进行发动机的燃料调节,采用正反双向旋转双轴输出方法进行发动机的工质输出控制,发动机的燃烧室安装在隔板组件上,将内装的固体药柱燃烧产生的初始燃气作为发动机的启动工质,将鱼雷燃料燃烧产生的高温高压燃气作为发动机连续运转的工质。发动机的功能是将燃料燃烧生成的高温高压燃气热能连续不断地转变为驱动螺旋桨旋转的机械功,并带动海水泵和燃料泵及发电机工作[3]。
发动机由带动前螺旋桨转动的外轴组件和带动后螺旋桨转动的内轴组件两大部分组成,内、外轴组件前段与轴承相连,采用离心式转动控制方法,进行让发动机的锥形滚动轴承接触控制,提高发动机的转动驱动控制能力。发动机的配流部分在泵的中部,配流阀通过流盘、配流环进行泵轴转动控制,燃料在一定的压力作用下,经过配流阀进入柱塞孔内,泵轴继续旋转,使油缸配流窗口和动力输出区域连通,燃料泵的工况预先设定好,并通过单向阀输送到燃烧室做功[4],根据上述原理,进行鱼雷活塞式凸轮发动机的优化控制设计。
2 被控对象描述及凸轮发动机控制律优化
2.1 被控对象描述
首先构建活塞式凸轮发动机控制总体结构模型,活塞式凸轮发动机控制建立在燃料泵的配流分析和控制约束参量特征分析基础上,采用加速度计和磁力阀进行活塞式凸轮发动机的流量调节和燃烧室做功调节,采用时滞跟踪补偿模型构建活塞式凸轮发动机控制的约束参量模型[5],得到活塞式凸轮发动机扰动控制的被控对象模型如图1所示。

图1 活塞式凸轮发动机扰动控制的被控对象模型
Fig.1Controlledobjectmodelfordisturbancecontrolofpistoncamengine
在图1所示的活塞式凸轮发动机扰动控制对象模型中,采用自适应线性抗扰动方法建立发动机控制的惯性约束模型描述为:
(1)
其中,f1(s)和f2(s)表示发动机的工质输出饱和项和时滞项,采用积分补偿方法,得到时滞控制对象模型描述为:
(2)
研究中,根据执行机构的做功性能,结合模糊控制方法进行活塞式凸轮发动机控制的输出功率调节[6],得到发动机的动力输出函数为:
(3)
其中,C1(s)为配流控制约束项,C2(s)为配流环的扰动函数。
进一步弱化饱和对系统的影响,对活塞式凸轮发动机的扰动项进行自适应加权学习[7],得到活塞式凸轮发动机的动力学特征参量为:
(4)
由此构建活塞式凸轮发动机控制对象模型,在外变干扰下采用模糊约束方法进行活塞式凸轮发动机的耦合处理,实现燃料泵的流量控制。
2.2 控制约束参量分析及控制算法
为了实现对鱼雷活塞式凸轮发动机的自动控制设计,需要分析鱼雷活塞式凸轮发动机控制输入输出关系模型,假设G0(s)e-τs是鱼雷发动机的功率传递函数,Gc(s)是燃料输出的密度,Y(s)与e-tms是海水泵的动力输出和时滞变量。当发动机的电磁阀的特征量满足Gm(s)=G0(s),tm=τ,凸轮式发动机的电磁阀的节气门反馈传递函数为:
H(s)+Y(s)=Gm(s)U(s)
(5)
采用Laplace变换进行活塞式凸轮发动机自抗扰控制[8],发动机外轴的动力输出表示为:
(6)

(7)

根据上述控制算法设计,采用锥形滚动轴承转动调节方法进行凸轮发动机的运转工质调节,采用正反向旋转双轴输出调节方法提高发动机驱动机械功,实现发动机的控制算法优化设计[9]。
3 发动机智能控制设计
在构造鱼雷活塞式凸轮发动机控制约束参量模型和发动机的结构特征分析的基础上,进行发动机控制模型的优化设计,本文提出一种基于正反向旋转双轴输出控制的鱼雷活塞式凸轮发动机的智能控制方法。采用正反向旋转双轴输出调节方法提高发动机驱动机械功,结合单片机进行鱼雷活塞式凸轮发动机的计算机智能控制,本文设计的鱼雷活塞式凸轮发动机智能控制系统由发动机控制信息调制解调模块、上位机通信模块、数据采集模块、活塞式凸轮发动机控制设备的嵌入式控制模块和人机交互模块组成,提取反映活塞式凸轮发动机控制信息的频谱特征,实现活塞式凸轮发动机控制信息的多通道信息融合,采用嵌入式技术进行发动机的控制系统开发[10],使用51单片机进行鱼雷活塞式凸轮发动机的计算机智能控制,以ADI公司的ADSP21160处理器系统作为核心控制器,对各个功能模块的设计描述如下。
(1)活塞式凸轮发动机总线控制模块。活塞式凸轮发动机总线控制模块是实现发动机的实时数据采集功能,采用16位DSP进行传感信息处理,采用20条左右的单周期指令进行多线程控制,得到活塞式凸轮发动机总线控制模块电路如图2所示。
(2)活塞式凸轮发动机的嵌入式控制模块。活塞式凸轮发动机的嵌入式控制模块是动力系统的核心,采用PCI9054的LOCAL 总线进行控制程序加载,采用ZigBee技术进行活塞式凸轮发动机控制时钟采样,采用 8 位和 16 位单片机微控制器进行鱼雷活塞式凸轮发动机的智能控制,控制模块电路设计如图3所示。
(3)活塞式凸轮发动机控制调制解调模块。调制解调模块采用AD公司的AD9225芯片设计,根据活塞式凸轮发动机控制的AD采样需求,采用正反向旋转双轴输出调节方法提高发动机驱动机械功,结合单片机进行鱼雷活塞式凸轮发动机的计算机智能控制,采用并行外设接口进行人机交互设计,根据上述设计描述,得到活塞式凸轮发动机控制信息的调制解调模块的电路设计如图4所示。
综上分析,结合单片机进行鱼雷活塞式凸轮发动机的计算机智能控制,提高鱼雷活塞式凸轮发动机输出增益,实现对鱼雷活塞式凸轮发动机的智能控制设计。

图3 活塞式凸轮发动机的嵌入式控制模块电路

图4 活塞式凸轮发动机控制调制解调模块设计
Fig.4Designofcontrolmodulationanddemodulationmoduleforpistoncamengine
4 仿真实验与结果分析

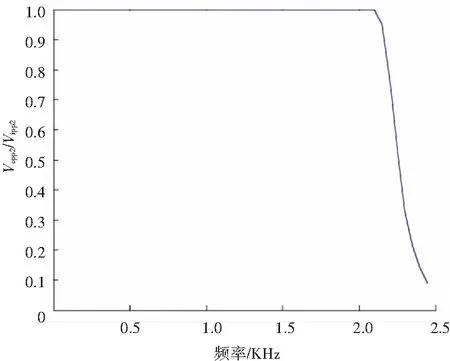
图5 发动机的控制增益输出
分析图5得知,采用本文方法进行鱼雷活塞式凸轮发动机控制的增益较高,发动机的燃料工质效率较高,提高了鱼雷发动机的输出稳定性,测试不同方法进行发动机控制的收敛曲线,如图6所示。分析图6得知,本文方法进行鱼雷活塞式凸轮发动机控制的收敛性较好,鲁棒性较高。
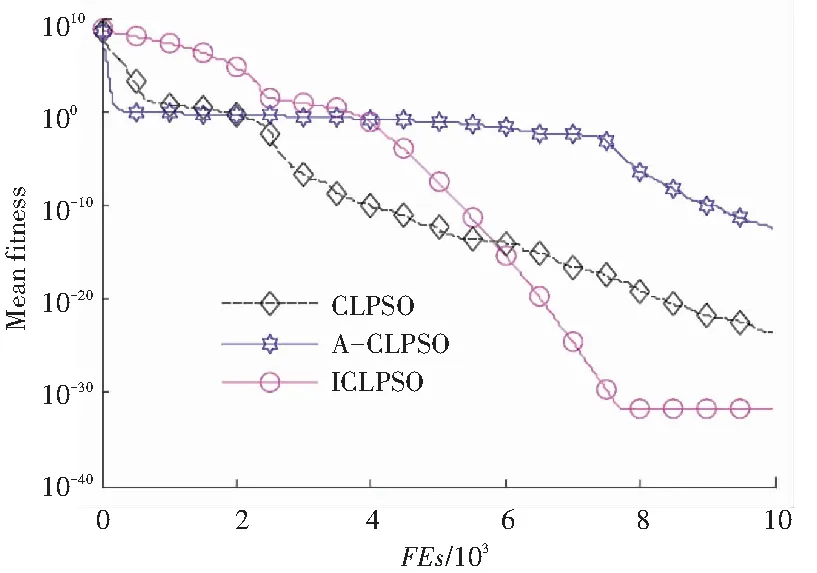
图6 控制收敛曲线对比
5 结束语
鱼雷发动机是一种活塞式的凸轮发动机,在转阀配气和螺旋桨驱动过程中,需要进行发动机的优化动力控制,结合智能控制技术,提高发动机的输出动力和功率,确保鱼雷的稳定运行。本文提出一种基于正反向旋转双轴输出控制的鱼雷活塞式凸轮发动机的智能控制方法。构造鱼雷活塞式凸轮发动机控制约束参量模型,采用锥形滚动轴承转动调节方法进行凸轮发动机的运转工质调节,采用正反向旋转双轴输出调节方法提高发动机驱动机械功,结合单片机进行鱼雷活塞式凸轮发动机的计算机智能控制,进行控制系统的硬件设计开发。测试表明,本文设计的发动机控制系统具有较高的控制增益,提高了鱼雷发动机的动力输出稳定性和鲁棒性。
