基于前馈预测的电液伺服PID 控制系统
2018-10-30张银龙田红丹魏超唐梓彭张勇铭
张银龙,田红丹,魏超,唐梓彭,张勇铭
(1.华电电力科学研究院有限公司,浙江省 杭州市 310030;2.杭州奥能电源设备有限公司,浙江省 杭州市 310030)
0 引言
电液伺服控制系统的作用是根据预先的参数设定将系统负载的参数控制在一定的范围内,防止负载出现故障,所以电液伺服系统的精度与决定负载正常运转的参数密切相关。设计满足负载运转参数要求的电液伺服控制系统是现代工业系统控制的关键任务[1-3]。
近几十年来,电液伺服系统控制器的设计受到了广泛关注[4-11]。PID控制原理简单、易于整定,使用方便且调节性能指标对于受控对象的稍许变化不敏感,但是PID控制器只有在参数得到良好整定的前提下才能达到令人满意的效果。因此,为满足电液伺服系统控制性能的要求,就需要寻求一种与PID控制相结合的新的控制策略。
作为一种预测控制算法,动态矩阵控制(dynamic matrix control,DMC)广泛应用于现代控制领域。本文采用基于前馈DMC的PID控制器对液压伺服系统进行控制设计和分析。DMC算法不依赖对象的精确数学模型,采用滚动优化实现当前时刻控制输入量的优化。数值仿真实验验证了本文提出的基于前馈DMC的PID控制器的有效性。
1 电液伺服系统的数学模型
本文采用的伺服调速系统的开环传递函数为

式中:Tm为调速系统的时间常数;K为调速系统的增益。
2 基于前馈预测的PID控制器设计
2.1 建立前馈预测算法
DMC算法采用对象的阶跃响应函数作为预测模型。即在系统的输入端加上一单位阶跃信号后,在各个采样时间的动态阶跃响应系数分别为为模型的时域长度。
从 k时刻起对系统施加 M个控制增量Δu( k + j)( j = 0,1,… ,M -1)后,则系统在未来P个时刻的预测输出为

式中A为由阶跃响应系数组成的P×M矩阵:

DMC采用滚动优化目标函数,选择未来控制时域M内的控制增量序列,使系统在其作用下未来优化时域P内的预测输出值尽可能接近期望输出值,最优控制律由以下二次型性能指标确定:


式(5)给出的是未来M个时刻输入的最优解,而DMC只要其中的即时控制增量()u kΔ构成实际控制作用于对象:

2.2 反馈PID控制器
本文采用增量式PID控制器对液压伺服系统进行在线控制,其控制律可以描述为如下形式:

式中:KP,KI和 KD分别为比例系数、积分时间常数和微分时间常数; ()e k为k时刻系统的真实输出值与给定的期望值之差。
由以上分析可知,由前馈DMC算法和反馈PID控制器相结合,建立液压伺服系统的控制系统如图1所示。
那么,在k时刻系统总的优化控制输入值为


图1 液压伺服系统的控制器框图Fig. 1 Controller block diagram of hydraulic servo system
2.3 PID控制器的参数整定
本文采用Ziegler-Nichols整定法对PID控制器参数进行整定,其经验公式见表 1。通过查表可以确定PID的3个参数值。

表1 临界比例带法参数整定公式Tab. 1 Critical proportional band parameter setting formula
3 电液伺服控制系统的仿真结果分析
3.1 阶跃输入的响应结果
当给系统一个单位阶跃扰动时,用MATLAB软件仿真系统的阶跃响应,通过临界比例带法优化PID参数,并且得到动态矩阵预测控制中的动态阶跃响应系数,其结果分别如图2—4所示。
从图3和图4可以看出,通过前馈DMC-PID控制器对系统进行控制,系统的稳态误差较小,调节时间在 2 s以内,系统响应速度快,满足电液伺服系统的设计要求。

图2 DMC动态阶跃响应系数曲线Fig. 2 DMC dynamic step response coefficient curve

图3 前馈DMC-PID控制器阶跃响应输入曲线Fig. 3 Feedforward DMC-PID controller step response input curve

图4 前馈DMC-PID控制器阶跃响应输出曲线Fig. 4 Feedforward DMC-PID controller step response output curve
3.2 脉冲输入的响应结果
当给系统一个单位脉冲扰动时,PID参数保持不变,使用 MATLAB软件仿真系统的阶跃响应,观察系统的控制量和输出量的脉冲响应变化,其结果分别如图5和图6所示。
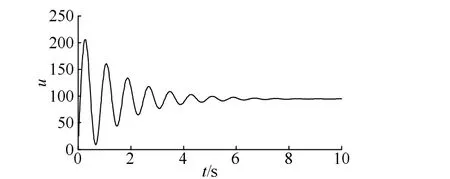
图5 前馈DMC-PID控制器阶跃响应输入曲线Fig. 5 Feedforward DMC-PID controller step response input curve

图6 前馈DMC-PID控制器阶跃响应输出曲线Fig. 6 Feedforward DMC-PID controller step response output curve
从图5和图6可以看出,通过前馈DMC-PID控制器对系统进行控制,系统的稳态误差相对较小,虽然调节时间相对较长,但是系统在振荡一段时间后仍能达到稳定状态,基本满足电液伺服系统的设计要求。
4 结论
本文将前馈DMC和PID控制算法相结合应用于电液伺服系统中。仿真结果表明,本文所设计的控制算法及伺服放大器能够达到伺服系统设计的要求,该控制算法最大的优势是不依赖精确的数学模型,并且能够有效地抑制外界带来的干扰,使得整个伺服系统具有较好的快速性、准确性和稳定性。