基于多目标蜂群进化优化的微电网能量调度方法
2018-10-30李佳华马连博王兴伟邵一川
李佳华, 马连博, 王兴伟, 程 适, 邵一川
(1.东北大学 软件学院, 辽宁 沈阳 110169; 2.陕西师范大学 计算机科学学院, 陕西 西安 710119; 3.沈阳大学 信息工程学院, 辽宁 沈阳 110044)
0 引言
微电网(micro-grid) 是一种面向小型用户群的新型配电网络系统.它将用户、分布式电源和储能系统进行联网控制,支持大电网兼容运行与局域单独运行,具有环境效益高、建设成本低等优势[1-3].其中,微电网内部分布式电源与储能的调度优化是实现微电网经济、技术、环境效益最大化的重要研究方向[4].
微电网能量调度模型,数学上可归结为在满足微电网系统的能量平衡和其他约束的前提下的复杂优化问题.考虑到系统规模的急速增长,现有能量调度网络必须满足分布式电源与可再生能源的大规模接入,从经济收益、运行成本、环保效益等角度实现对负荷以多种能源形式的高可靠供给.显然,微电网能量调度问题含有大规模的非线性、非确定的、有约束的控制变量,本质上是一个复杂的多目标优化问题(multi-objective problem,MOP).
在微电网能量调度方面,文献[5]将二次规划用于优化混合型微电网储能动态经济调度,使系统在优化储能使用的同时提供负荷需求.文献[6]采用改进的粒子群优化(PSO)算法结合蒙特卡罗模拟求解目标函数.文献[7]提出一种基于外部档案的多目标人工蜂群优化算法(multi-objective artificial bee colony, MOABC)用于两目标函数求解,函数模型采用微电源有功出力的二阶多项式表示.目前主流的解决方案采用线性规划法、加权求和法、非支配排序遗传算法(nondominated sorting genetic algorithm, NSGA)和粒子群算法(particle swarm optimization, PSO),但算法仍存在早熟收敛、易陷入局部最优等缺点,而且,算法后期收敛速度慢,精度较差.人工蜂群算法(artificial bee colony algorithm, ABC)是一种基于蜜蜂群智能搜索行为的优化算法,通过模拟雇佣蜂、跟随蜂和侦查蜂3种觅食蜂的搜索策略和协作原理,结合了全局搜索和局部搜索的方法,具有结构简单、参数较少、收缩能力强和收敛速度快等优点[8].
结合上述研究现状与面临的问题,笔者设计一种以MT(微型涡轮机)驱动的热电联产(combined cooling and heating power, CCHP)微电网仿真模型系统,其中包括风力发电机(WT)、光伏电池(PV)、微型涡轮机(MT)、燃料电池(FC)、柴油机(DE)和分布式储能设备(BS).在此基础上建立满足微电网经济运行和环保的双重优化模型,并采用人工蜂群算法进行优化,从而高效地完成能量调度.
为了有效求解上述模型,笔者提出了一种基于指标化拥堵距离的多目标蜂群算法(ICABC).该算法采用广泛学习策略来保证算法的多样性,避免早熟收敛;通过改进的拥堵距离策略,提高运行速度,保证种群的多样性与收敛性.综上,笔者的贡献主要包括:①设计了以MT驱动的微电网仿真系统和基于此模型的经济环保能量调度模型.②为了有效地解决上述模型,提出基于指标化拥堵距离的多目标蜂群算法ICABC.
1 微电网结构设计
1.1 微电网结构设计
微电网的基本结构如图1所示,微网呈放射状,含有A、B、C 3条馈线:敏感负荷(关键负荷)分布在馈线A;可调节负荷(重要负荷)分布在馈线B;非敏感负荷(一般负荷)分布在馈线C.根据负荷的重要程度划分等级,从而可实现对负荷的分级分层控制.调度系统的并网运行模式通过电网公共连接点(PCC)与上级电网的变电站联系.
微电网系统包括柴油机驱动的常规发电方式、风能和太阳能可再生能源发电方式以及MT驱动的热电联产系统(CCHP).其中供能组件包括风力发电机、光伏电池、微型燃气轮机和燃料电池等;同时,供能组件可为蓄电池充电,当蓄电池满足约束条件时,蓄电池可通过放电为微电网的负荷提供支持.

图1 微电网结构图Fig.1 Microgrid structure
1.2 优化调度结构设计
图2为微电网系统的优化调度模型结构关系图,包含输入、输出、调度系统和优化模块四部分,模块间通过数据交互实现目标优化.

图2 优化调度模型关系图Fig.2 Relation between modules of scheduling optimization model
在此基础上,笔者设计了包含热电联供的CCHP微电网并网运行控制策略,具体如下:(1)先安排不可优化的分布式电源,如风力发电和光伏发电.(2)当不可优化的分布式电源不能满足全部负荷需求时,微型涡轮机、燃料电池、柴油机后续进行出力优化.(3)对分布式电源的总发电成本与购电成本、售电成本进行比较:①当发电成本大于购电成本时,需从外网购电满足.②当发电成本小于购电成本时,若发电成本小于售电成本时,可将盈余电量向外网售出;若发电成本大于售电成本时,则不多发电,只满足微电网的日常负荷需求即可.
2 仿真模型
2.1 微型涡轮机(MT)的数学模型
对比传统活塞式发电机,微型燃气涡轮机(MT)有以下优势[9]:可使用氢气、天然气、酒精、以及可再生燃油等作为燃料.热电联供后,发电综合热效率可达到80%以上.具体地,MT的数学模型如下:
(1)

(2)
式中:CGAS为天然气价格,取2.95元/m3;LGAS为天然气的净热值,取10 g/kW.

(3)
(4)

(5)
(6)
式中:ηqre为涡轮机(MT)余热回收效率;Kheat、Kcool为供热系数和供冷系数.
(7)
式中:KMT-OM为运行维护成本比例常数,取0.42元/(kW·h).
2.2 燃料电池(FC)的数学模型

(8)

(9)
式中:KFC-OM为运行维护成本比例常数,取0.03元/(kW·h).
2.3 柴油发电机(DE)的数学模型
柴油发电机的燃料消耗与其有功功率输出有关[11],选用30 kW的潍坊柴油发电机组,主要技术参数如表1所示.

表1 柴油发电机组参数Tab.1 Parameters of diesel
该机组燃油消耗率为KDE-FUL≤230 g/(kW·h),取燃油消耗率最大值230 g/(kW·h)用于柴油发电机的燃料成本计算.柴油发电机(DE)的数学模型如下:
(10)

(11)
式中:KDE-OM为比例常数,取0.09元/(kW·h).
2.4 蓄电池(BS)的数学模型
考虑到系统对稳定性的需求,选取蓄电池进行储能,可平滑供电负荷和分布式发电的出力波动,实现微电网可调度化[12].其中,蓄电池的充电状态(SOC)一般用剩余电量与额定电量的比值来衡量,用于控制充放电过程和系统的经济调度.SOC充电公式可表示为:
SOC(t)=(1-η)SOC(t-1)-PINΔtηIN/E,
(12)
式中:η为蓄电池的自放电率,%/h;PIN为充电状态(为负时,表示电池正在充电);ηIN为充电效率;E为单位时间Δt内BS的总容量.SOC放电公式为:
SOC(t)=(1-η)SOC(t-1)-POUTΔt/(EηOUT),
(13)
式中:POUT为放电状态(为正时,表示电池正在放电);ηOUT表示放电效率.
3 微电网调度模型
3.1 微电网动态经济环保调度的目标函数
微电网环保经济运行的目标是调节微电网和各分布式电源的出力,使微电网发电成本最小及排放成本最小.
(1)微电网系统的运行成本(f1).为简化起见,将各种效益转化为成本,使运行成本最小、经济效益最高,即
(14)

(15)

(16)
DC=INCOST·CFR;
(17)
(18)
式中:DC为分布式电源(DG)每千瓦时的折旧资本;Pmax是分布式电源(DG)的最大输出功率;CF为容量因子;INCOST为分布式电源(DG)的安装成本,元/(kW·h);CFR为资本回收系数;d为利率,取6%;L为分布式电源的寿命,年.
(2)微电网系统的气体排放处理成本(f2).风力发电机和光伏电池是清洁能源,不消耗化石燃料,无环境污染,故它们的燃料消耗成本和气体排放处理成本为零.主要考虑3种排放气体:NOx、SO2、CO2,其他分布式电源的气体排放处理成本可表示为:
(19)
(20)

微电网环保经济运行模型的决策变量为:
(21)

3.2 约束条件
(1)功率平衡约束:
(22)

(2)分布式电源的功率约束:
PMIN≤Pi≤PMAX,
(23)
式中:PMIN是分布式电源的出力下限;PMAX是分布式电源的出力上限.
(3)微电网与上级电网的功率传输约束:
(24)

(4)气体排放约束:
QCO2(Pi)≤LCO2;
(25)
QSO2(Pi)≤LSO2;
(26)
QNOX(Pi)≤LNOX,
(27)
式中:LCO2、LSO2和LNOX为CO2、SO2和NOX的排放上限.
4 ICABC算法
4.1 基本原理
人工蜂群算法(ABC)[13]是基于蜂群搜索行为的智能优化算法,具有较好的全局搜索和局部搜索能力,在单目标优化方面表现出色.然而,与单目标优化问题不同,多目标优化问题需要找到一系列满足一定约束的Pareto最优解,求解难度更大.多目标优化一般涉及两个性能指标:收敛性和多样性,使搜索到的非支配解在求解空间分布均匀.为了保持个体的分布均匀,防止个体在局部聚集,经典的非支配排序遗传算法(NSGA-Ⅱ)[14]采用拥挤度距离,代替了需要指定共享半径的适应度共享策略,并在快速排序后的同层比较中作为精英选择标准,使Pareto域中的个体能扩展到整个Pareto域.基于上述工作,为了使ABC算法能够解决多目标优化问题,笔者提出了改进拥堵策略与快速非支配排序的多目标人工蜂群算法(ICABC)用于求解微电网能量调度问题.
4.2 基本人工蜂群算子
4.2.1 初始化阶段
在初始化阶段,设定种群的相关参数,包括种群数量、食物源数量、控制参数、最大循环数和D维解空间等.当所有参数确定后,对种群进行初始化.具体如下:
给定食物源Xi=(xi1,xi2,xi3,…,xiD)为种群中第i个食物源的位置,D为问题的维度.在求解空间中,每个食物源的位置初始化如下:
xid=Ld+randi,d(Ud-Ld),
d=1,2,…,D,
(28)
式中:Ld和Ud分别为整个搜索空间第d维的上下界;randi,d是(0,1)内均匀分布的随机数.
4.2.2 雇佣蜂阶段
雇佣蜂搜索到对应的食物源后记录其相关信息(蜜源位置、蜜源花蜜数量),并与跟随蜂共享信息.对于每个食物源,对应雇佣蜂的觅食路线是基于一个随机选择邻居k去探索一个新的食物源.具体来说,给定Xi,其临时位置计算方法如下:
Vi,j=xi,j+φi,j(xi,j-xk,j),
(29)
式中:i为当前正在搜索的个体;j为随机选择的维度;k为随机选择的不等于i的一个邻居;φi,j是[0,1]内的随机数;Vi,j是个体i产生的新位置.
在获得新的临时食物源之后,用贪婪法则评估其适应度,若新个体适应度大于原个体适应度,则认为新个体更优秀并代替原个体.
4.2.3 跟随蜂阶段
跟随蜂按照雇佣蜂提供的蜜源信息,确定较好的食物源进一步开采.在这个阶段跟随蜂根据个体适应度值计算该个体被选择进化的概率,然后通过轮盘赌的方法选择个体进行更深入的探索.第i个个体的选择概率Pi的计算方法如下:
(30)
式中:N为种群大小;fit(xi)表示xi的适应度值;Pi越大意味着跟随蜂在较好的食物源(具有较小的适应度值)附近搜索的次数越多.
4.2.4 侦查蜂阶段
当食物源耗尽或不能在有限数量的周期内得到改善,对应的雇佣蜂就会变成一只侦查蜂,其食物源则通过式(28)随机生成一个新的食物源.
4.3 快速非支配排序
NSGA-Ⅱ的快速非支配排序法如图3所示.设种群规模为N,将第t代产生的新种群Qt与父代Pt合并组成Rt,种群大小为2N.然后Rt根据支配关系得到一系列非支配Pareto解集:F1,F2,F3,…(解集级别依次降低).若F1中非支配解的个数小于N,则将F1的x个解选择到种群Pt+1.Pt+1中的剩余解将在其余层中继续选择,直到F3时,种群Pt+1的解的个数超过N,则需要对F3中的非支配解进行拥堵距离排序,较好的r个个体优先进入Pt+1.
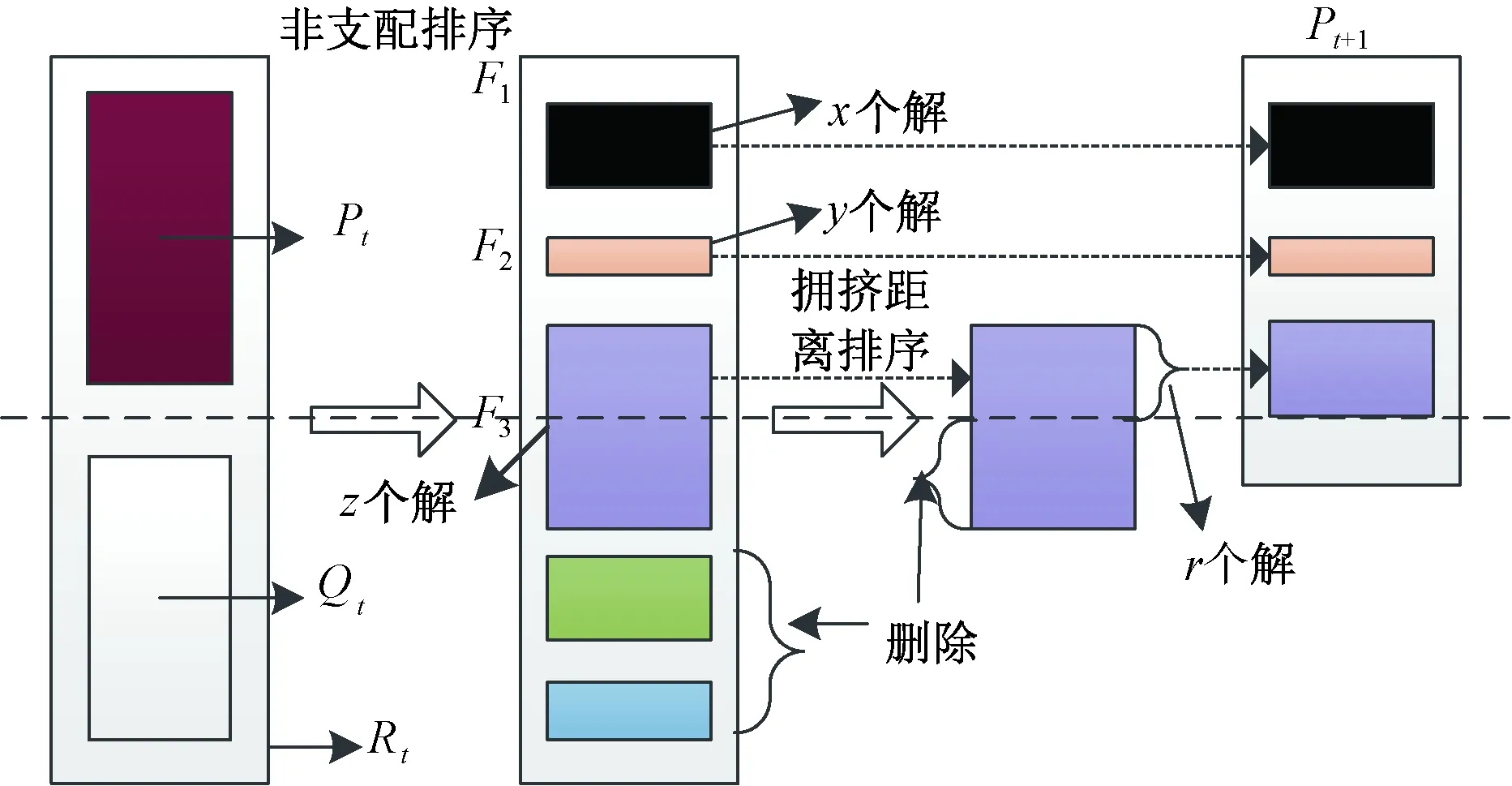
图3 快速非支配排序过程Fig.3 Process of fast-non-dominated-sort
4.4 基于指标的拥堵距离选择(DICC)方法
在非支配排序后,需对同一层非支配解集进行拥堵距离计算与排序,如图3所示.首先,将极端解(各目标上取最大或最小的解)的拥堵距离设为无穷大.对于其他解i,其拥堵距离计算如下:
(31)
式中:Di为个体i的拥堵距离;M为目标函数的个数;fi,j为个体i的第j个目标函数值.随着目标函数数量的增加,非支配解占全部解的比例增加,识别个体之间的差异(即计算个体之间的相似性)将变得更困难.上述方法将会一次性删除密集区域中的重要个体,损害帕累托前沿的多样性.为此,使用基于指标的拥堵距离策略[15],定义如下:
(32)
式中:M为目标个数;FIε+(xi)为个体i基于指标的适应度.计算如下:
(33)
式中:参数s是比例因子.
基于此定义,算法1(拥堵距离)计算流程具体如下:
步骤1初始化非支配解集中解的拥堵距离,即DIi=0;
步骤2通过计算每个目标函数值对个体进行排序;边界个体被预先设置为无穷大,以保证在下一个选择过程中的可用性;
步骤3通过公式(32)计算非支配解基于指标的拥挤距离;
步骤4确定集合中拥堵距离最小的解DY并删除;
步骤5分别通过以下公式重新计算个体DY+1和DY-1的拥堵距离.
步骤6如果档案大小仍然超过最大预设大小,则返回步骤3;否则,终止它.
4.5 约束处理
在动态经济调度中,可行解在目标空间的比例较小,仅使用惩罚函数处理多目标约束会导致计算速度慢,不易找到最优解,进而导致优化的功率不足或过剩,增加发电成本.为了解决这一问题,采用能够处理等式约束的动态策略,雇佣蜂阶段食物源位置更新的等式约束处理如下:
步骤1使用式(29),更新食物源的前D-1维的位置.
步骤2最终维度由等式约束(22)确定.如果该值在其范围内,则转到步骤5.如果它高于边界值,使其值等于边界值,然后继续步骤3.
步骤3设置L=1.
步骤4维度L的值由等式约束(22)确定.如果它在范围内,则转到步骤5.如果它高于边界值,使其值等于边界值,设置L=L+1,然后转到步骤4.
步骤5停止更新过程.
4.6 求解流程
求解流程如图4所示.
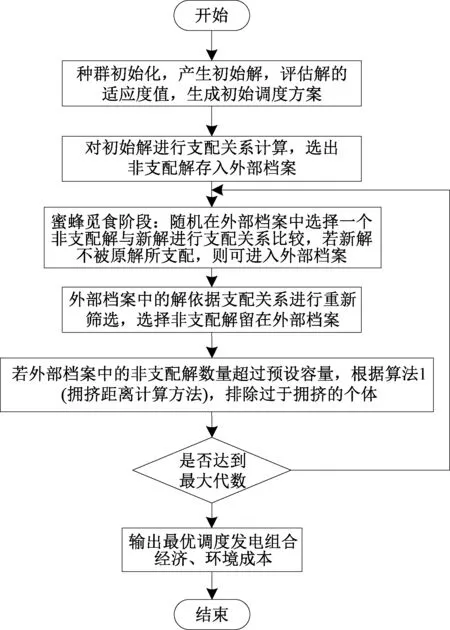
图4 求解流程图Fig.4 Solution flowchart
5 实验部分
5.1 Benchmark测试函数
本实验使用两目标Benchmark测试函数ZDT1、ZDT2、ZDT3和ZDT6来评估ICABC算法的性能.比较算法为MOCLPSO[16]和NSGA-Ⅱ[14].测试函数的决策变量为30维,ZDT1和ZDT2分别有凸和凹的Pareto前沿,ZDT3的Pareto前沿由几段不连续的凸线组成,ZDT6的非劣解在Pareto前沿分布不连续且密度不均匀,越靠近Pareto前沿解的密度越低,反之越高.详细函数描述参考文献[17-18].
5.2 实验设置
本实验中,ICABC算法种群大小SN=50,外部档案大小A=100,MOCLPSO的种群大小为50.
NSGA-Ⅱ算法采用模拟二进制交叉(SBX)和多项式变异生成子代,种群大小设为100,交叉概率pc=0.9,突变概率pm=1/n.
5.3 结果与分析
仅从图5上看,各算法都具有良好的收敛性与分布性.为了更准确比较和分析各个算法,引入收敛性和分布性指标:收敛性指标用来衡量各解到理想前沿的距离;分布性指标用来计算各相邻点之间距离的标准差.收敛性和分布性指标值越小,说明该算法的收敛性和分布性越好.
各算法在标准测试集ZDT1、ZDT2、ZDT3、ZDT6的实验结果如表2所示,包括20次运行之后收敛性及分布性的平均值、中间值、最优值、最差值和标准差.在ZDT1、ZDT2、ZDT3上,ICABC的收敛性与多样性均好于其他两个算法.
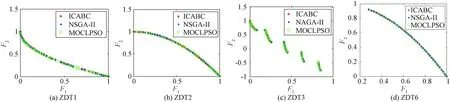
图5 3种算法在ZDT测试函数上的收敛变化曲线Fig.5 Convergence curves of three algorithms on a set of benchmark problems
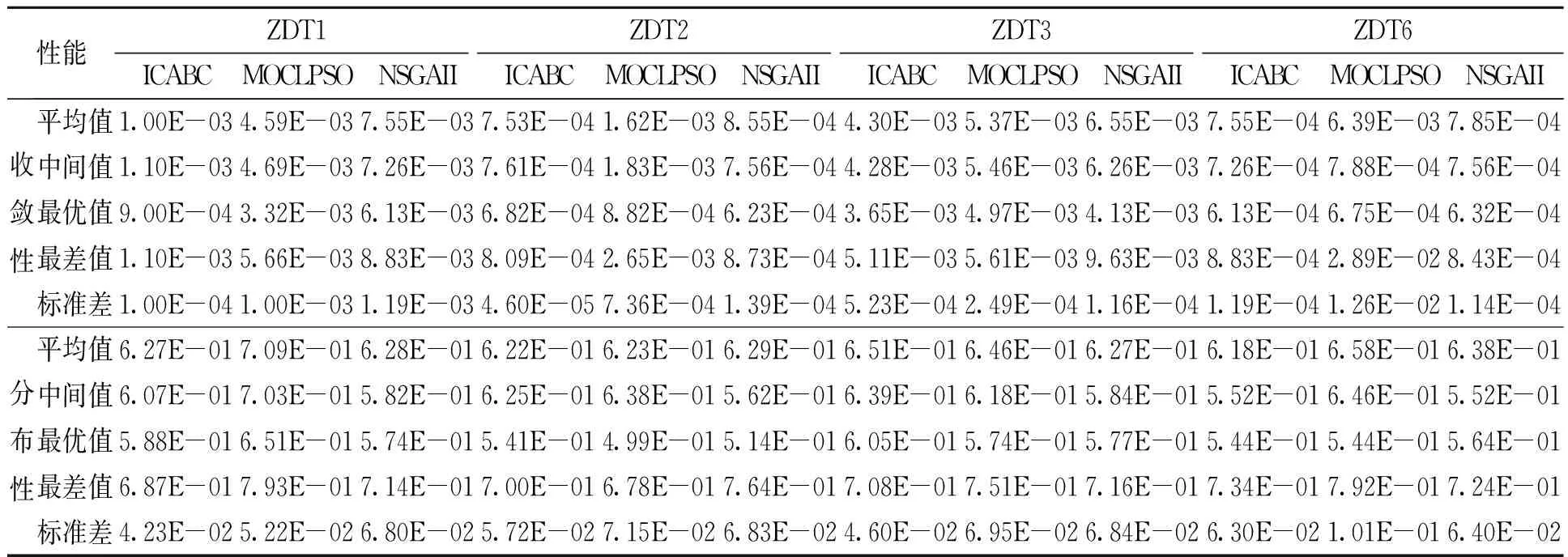
表2 3种算法在30维 ZDT1、ZDT2、ZDT3和ZDT6上的性能比较Tab.2 Performance comparison of three algorithms on ZDT1, ZDT2, ZDT3 and ZDT6
仅在ZDT3上,ICABC稍差于NSGA-Ⅱ.进一步分析,从表2中的数据可以看出,ICABC算法在ZDT1上找到了最小的平均值1.00E-03与最小的方差1.00E-04;性能最差是NSGA-Ⅱ,它的平均值为7.55E-03,方差为1.19E-03.这种差异的原因主要是由于以下两点:①蜂群算法能够更好地避免陷入局部最优,保持了算法的多样性;②Pareto排序提供了良好的非支配前沿选择,提高了算法的收敛性.
在ZDT2上,也可以看到类似的性能表现:ICABC和NSGA-Ⅱ在收敛性上的均值分别为7.53E-04、8.55E-04,优于MOCLPSO的均值1.62E-03一个数量级;同时,ICABC的标准差为4.60E-05,优于MOCLPSO和NSGA-Ⅱ一个数量级,平均值分散稳定.由于ZDT3的Pareto前沿由几段不连续的凸线组成,全部算法在该测试集上表现都有所下滑,在平均值、中间值、最优值、最差值和标准差上与ZDT2相比均相差一个数量级,但是仍然可以看出,ICABC优于其他算法.在ZDT6上,ICABC虽然略逊于NSGA-Ⅱ,但是依然好过MOCLPSO.综上,ICABC无论是在收敛性还是分布性上,都优于其他两个算法.
5.4 基于ICABC的微电网能量调度
采用的微电网系统结构如图1所示,系统基准容量为100 kVA,基准电压为400 V,如图6所示为不可控分布式电源WT和PV以最大功率跟踪方式运行的功率曲线图.微电网与上级电网的实时电价以沈阳市电价为标准.

图6 太阳能、风能功率预测图Fig.6 Forecasting chart of solar energy and wind power
5.5 结果分析
使用本文改进拥堵策略的多目标蜂群优化算法,将上述经济调度和环境调度模型优化,得到两目标下的调度方案Pareto前沿如图8所示.图7所示为使用MOCLPSO两目标优化调度Pareto前沿,与ICABC相比,Pareto前沿既不收敛也不均匀.

图7 MOCLPSO在微电网调度模型的Pareto前沿Fig.7 Pareto front of microgrid scheduling model use MOCLPSO

图8 ICABC在微电网调度模型的Pareto前沿Fig.8 Pareto front of microgrid scheduling model use ICABC
从图8可看出,在蜂群算法中引入外部档案用于存储非支配解,并使用基于指标的拥堵策略进行非支配解的选择,不仅可以获得有效的收敛解,还可以获得分布广泛而均匀的Pareto前沿.
以图8中Pareto前沿中的一个折中解为例,在满足经济成本和环境成本最小的目标下,对应的调度方案如图9所示.图9所示的仿真模型试验的调度方案暂且不考虑微电网的热负荷,结果显示,微型涡轮机MT的出力基本为零,不为其他一般负荷供能.

图9 多目标优化调度优化结果Fig.9 Optimization result of multi-objective optimization scheduling
燃料电池FC由于其发电效率高、污染气体排放少等优点应该被优先安排.在用电高峰期(12:00、17:00-20:00)能量调度系统优先安排FC,柴油发电机DE由于其功率输出稳定可作为补充能源为微电网负荷供能.由图6可知,由于太阳光日照因素,太阳能在10:00-15:00表现积极;而由图9可知,柴油机DE在10:00-15:00出力较弱,在其他时间段表现相对活跃.
由实验结果可知,调度系统能够合理安排分布式电源的出力,故而当技术条件具备,可大力增加太阳能等清洁能源机组数量.由图9可知,在00:00-7:00、22:00-24:00用电低谷期间,微电网在满足负荷要求之外,向上级电网售电获得收益;在用电高峰期微电网向上级电网购电满足负荷需求.结果表明:ICABC算法能有效降低系统成本及废气处理成本,权衡经济和环境效益,可根据具体微电网环境要求,合理安排能量调度方案.
6 结论
以微电网系统运行的经济和环境作为双重优化目标,设计了以风能、光能、燃料电池、微型涡轮机以及蓄电池为主要供能单位的微电网结构,以典型的并网运行控制策略为例,对多目标动态优化调度的结果进行了比较.在求解方法上结合ABC算法,引入非支配排序策略,基于指标计算,改进了个体拥堵评估策略,有效地提高了算法的收敛性,同时改善了Pareto前沿的分布特性.算例分析结果证明了ICABC算法在工程领域具有良好的应用前景.
