基于Matlab/Simulink和LabVIEW的电力拖动虚实结合实验系统设计*
2018-10-30李沁艾青陈坤燚李绍武
李沁,艾青,陈坤燚,李绍武
基于Matlab/Simulink和LabVIEW的电力拖动虚实结合实验系统设计*
李沁,艾青,陈坤燚,李绍武
(湖北民族学院 信息工程学院,湖北 恩施土家族苗族自治州 445000)
在《电力拖动》等课程中,实验教学非常重要,然而,由于学生对于各变流电路和控制算法不熟悉,相关实验设备与器材相对落后,实验内容和形式单一,影响了教学质量和教学效益的改善和提高,限制了学生综合素养和创新能力的培养。因此将Matlab/Simulink仿真和LabVIEW软件技术应用于电力电子和电力拖动的实验教学中,将虚拟环节作为实践教学的重要部分,建立虚实结合的电机拖动与控制实验系统。为实验教学提供可拓展的实验设计、调试与验证的新型实验平台,也能提高学生的学习积极性,培养创新精神,提升学生相应的工程设计与开发能力。
电力拖动;虚实结合;实验系统;拓扑结构
《电力电子学》《电力拖动与控制》是电气专业的专业课,内容包括变流电路拓扑结构、变流电路控制等部分,传统的实验教学倾向于工作原理结果的验证,内容单一枯燥,倾向于验证性实验,并且受硬件条件[1]的限制,部分实验现象不明显,实验结论不直观,实验效果不理想,参数的变化所带来的实验结果的不同也无法通过单一的实验过程进行设计与验证,可扩展性差,不利于培养学生的积极性和创造性;而仿真实验过于理想化,各设定条件与实际情况有差异,没有实物也不便于学生对实验结果的直观理解和观察[1-4]。
而基于Matlab/Simulink和LabVIEW设计的虚实结合的实验系统能对传统的实验和仿真实验进行有效结合与补充,能方便、可靠地完成控制器的建模和设计以及实验结论的显示与观测,从而提高实验效果。
Matlab/Simulink是一款非常适用于电力电子与电力拖动课程的仿真软件,其系统自带的Power system工具箱包含多种电力系统相关的器件与模块。学生在实验过程中,可根据需要利用系统自身提供的基本器件和模块来构建模型,系统的各个器件参数和控制参数也可以由学生自行修改和设计,可在较大范围内观察到不同参数设计下运行结果的不同,从而更加直观地理解系统模型的工作原理和运行过程,也避免了传统的硬件实验系统中由于学生对于实验原理理解不足和操作失误所带来的硬件损坏。
此外,LabVIEW技术具有强大的分析能力和友好的用户界面设计功能,可以节省仪器设备的建设投入,不受实验硬件条件的限制,减少复杂的数据运算。在本实验系统中,通过LabVIEW技术配合Matlab的使用,可以实现直观地输出波形,避免受到硬件条件的限制而不能同时观测多路信号的波形,方便学生对各输入输出同时进行比较分析,加深理解,同时,还能对检测的数据进行后续的误差分析等数据处理,有助于学生专注于理论的分析和概念的明确,实现更好的教学效果[5-7]。
1 虚实结合电机实验系统
在本实验系统中将Matlab/Simulink仿真和LabVIEW虚拟实验技术应用于电力电子和电力拖动的实验教学中,将虚拟实验作为实践教学的重要环节,通过Matlab/Simulink仿真工具实现仿真模型的后台搭建与运行计算,由LabVIEW建立直观的数据观测与验证的界面。
对于学习能力较强的学生可以在Matlab/Simulink中对转速控制器进行设计,加深对各种控制算法的理解和学习,提升设计能力和应用能力;对于学习能力一般的学生,可以在LabVIEW设计的监控界面上通过调节控制器的参数观察到各输出的变化,直观地观察到直流或者交流电机转速的变化,加深对理论知识的理解和运用[8]。
2 实验系统的设计
考虑到电机转速控制是电力拖动与控制类课程的典型实验项目,转速-电流双闭环控制系统的控制方法、控制规律和设计原理也是课程的重点和难点,因此,本论文以交流电机变速变频调节系统的实验为例,以实验原理、实验设计过程、实验运行结果检测界面为例,说明采用LabVIEW的电力拖动课程实验系统的设计过程。
2.1 转速-直流双闭环调速系统的原理
转速闭环变压变频调速系统原理图如图1所示。
图1为以转速反馈调节为外环、电流反馈调节为内环的双闭环直流电机控制系统,电流调节器串联在转速调节器之后。被控量为电机的转速,通过测速传感器得到与转速成正比的反馈电压n,与给定电压n*比较后得到转速的偏差电压△n,将偏差电压送给转速调节器得到电流的给定值,并与实际电流反馈量进行比较,将偏差送入电流调节器得到电力电子变换器的驱动控制电压信号ct.转速调节器和电流调节器都具有限幅作用,其中,转速调节器能控制电机转速跟随给定电压变化[9]。
2.2 系统整体结构设计
系统整体结构由上位机控制平台、主电路系统、DSP模块、电机运行系统、检测与反馈系统等部分组成。
考虑到电力拖动控制课程的相关实验希望考察学生对控制算法的理解与应用,而不在于程序语言,尤其是编译语言的编写,因此,上位机控制系统中由Matlab/Simulink实现控制算法的设计,通过检测反馈转速与电流信号,实现闭环控制,将由Matlab/Simulink设计的控制器得到的参考值输入DSP模块,由DSP模块片内专门生产PWM波的事件管理单元得到相应的PWM控制信号,从而控制主电路系统中的逆变电路模块,实现电机的转速调节。同时,由LabVIEW实现检测与显示界面的设计,能直观地观察和显示各信号同步的波形与结果。
2.3 系统控制器的搭建
电机拖动控制课程实验中可实现的算法很多,在进行实验设计时,可以从简单的SPWM控制算法入手,逐渐加大实验难度,比如空间矢量控制、磁场定向控制、直接转矩控制等,本文以直接转矩控制为例说明系统控制器的设计与实现。采用直接转矩控制实现电机调速的原理如图2所示。
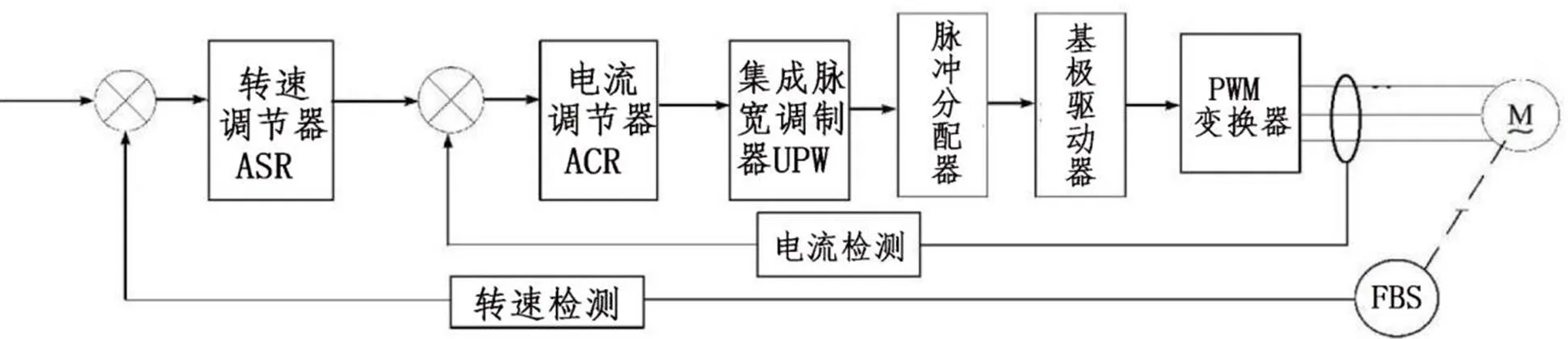
图1 转速闭环变压变频调速系统原理图
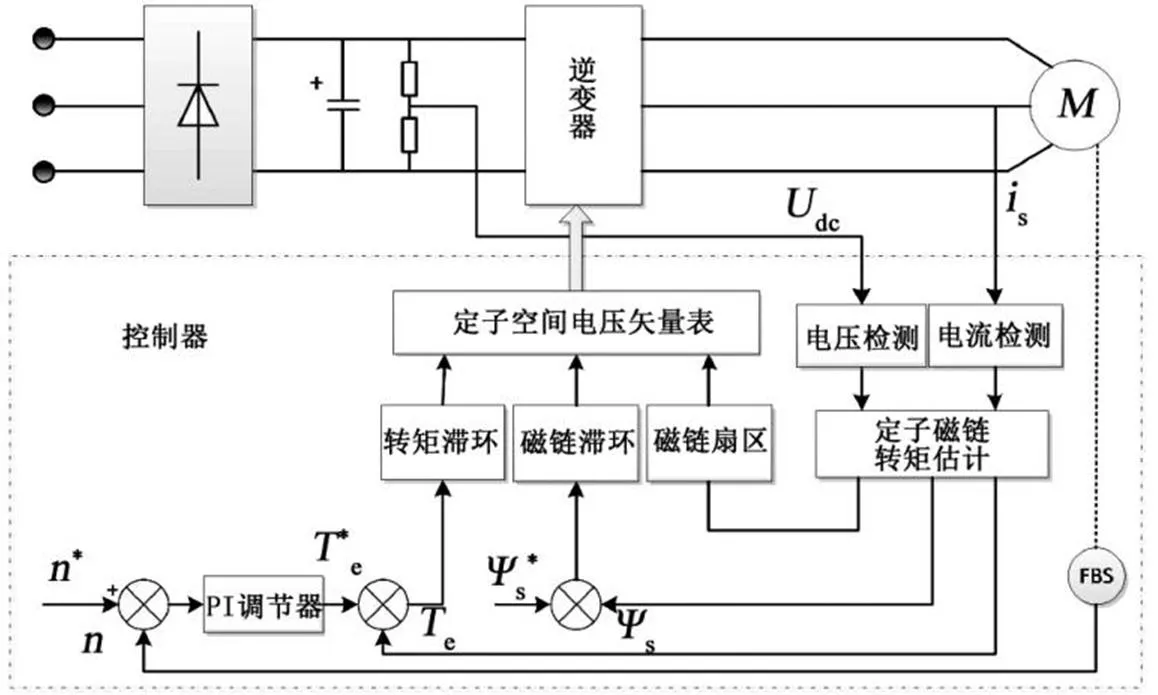
图2 直接转矩变频调速控制原理图
控制器的实现方式是将定子磁链近似圆形的轨迹划分为6个扇区,采用6个非零矢量和2个零矢量作为8个不同控制状态。系统根据转速调节器得到电磁转矩输出,再与电动机的转矩检测值进行比较从而得到转矩偏差值,并通过三点式转矩调节器的输出确定转矩的调节方向;同时,根据定子磁链观测值相位角判断定子磁链所在的扇区,然后通过磁链调节器的输出与转矩调节方向进行组合确定定子电压的合成空间矢量,从而最终确定主电路逆变模块的开关状态,控制电机电磁转矩跟踪给定值,实现电动机的转速调节[9]。 根据上述控制原理,在Simulink中搭建如图3所示的控制器仿真图。
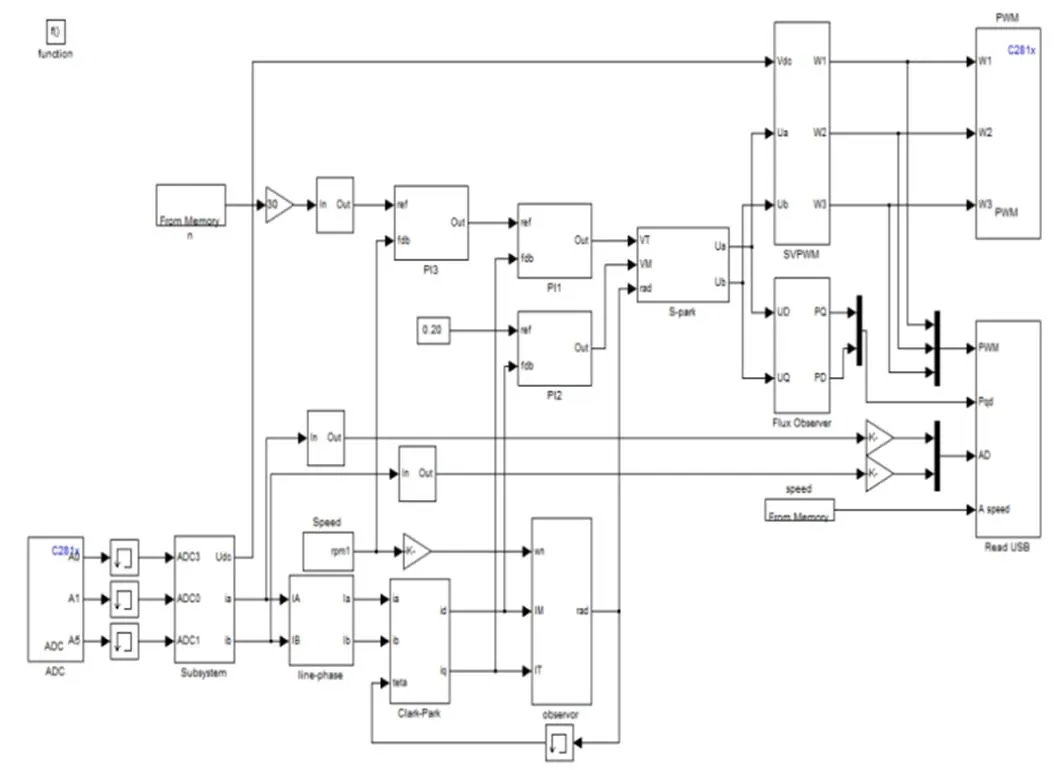
图3 直接转矩控制变频调速控制器设计图
其中,转速调节器和电流调节器都采用PI调节器,可由学生自行调节PI控制参数,观察调节器的PI参数变化对电机运行过渡过程和稳定状态的影响,加深理论知识的学习。
2.4 检测界面搭建
在上位机的Matlab/Similink中直接进行控制器算法的设计,通过ccs编译程序直接转换成汇编语言,下载进DSP中运行。在LabVIEW中编程实现直接转矩变频控制电机转速实验的检测界面,为了让界面简洁直观,学生易于操作控制,在进行上层检测界面设计时,需要合理设计界面,最大化地利用软件的优点。在上位机的检测界面上,学生可以输入和修改相应参数,比如转速、调制方式、低频补偿方式等,并在显示窗口直观地观察到变化的波形,包括三相电流的波形、电机转速的设定值与实际值、定子磁通轨迹,便于学生将实验结论与教学理论内容结合,实现有可操作性、测量直观方便的实验教学。在实际教学中,还可根据教学内容和学生进度,调节面板测量内容,加深学生理解,扩展实验内容。
3 实验及结论分析
在实验平台上按照规范要求连接好硬件线路,学生就可以在上位机调速系统的软件中进行实验。在系统中找到已经在Matlab/Simulink中编写好的直接转矩控制变频调速控制器仿真程序,通过Matlab编译后生成.out文件,通过jtag口或USB下载线下载进DSP,然后打开上位机中LabVIEW编写好的上位机输出检测界面,并在前面板中对传输口进行设置。软件加载后的初始电流的设定值可能不一致,有一定的偏差,令学生在设置中修改“电流校正”对话框中的数值,直到在电流监测界面上看到三相电流设置值完全一致。
在接通实验系统的主电源之前,需要提示学生注意,由于直接转矩实验属于冲击比较大的实验,启动时电流较大,因此必须在空载情况下启动,不能带载启动,程序设计了相关对话框提示学生确定电动机是否带重负载,避免过流烧坏设备保险丝。点击“运行程序”,运行过程监控界面如图4所示,在上位机的监控界面上一共显示3个曲线,包括三相电流显示界面、转速跟随显示界面、定子磁通的轨迹显示界面,可以双击放大显示。
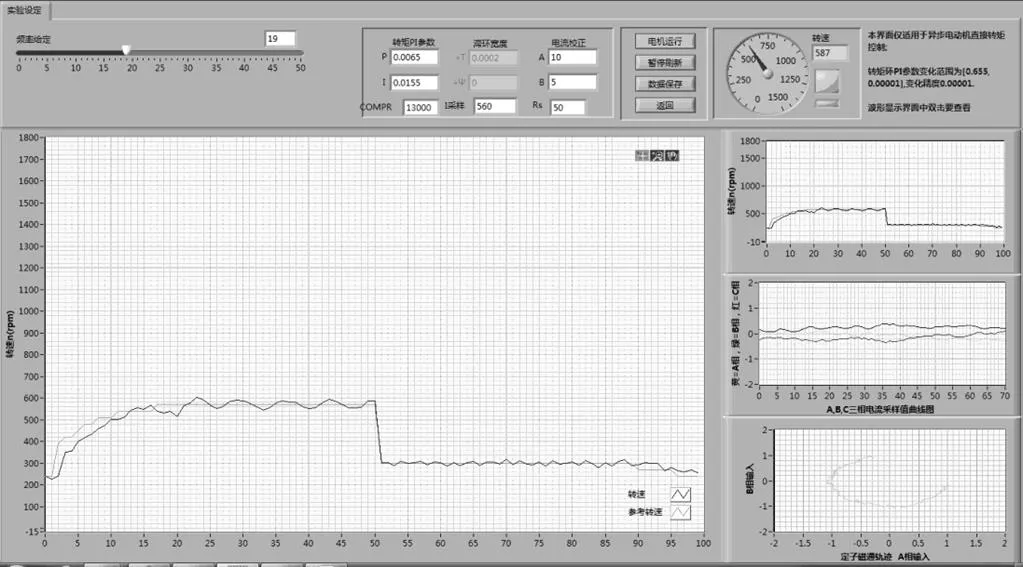
图4 上位机运行过程监控界面
上位机界面中的转速设定值可以通过鼠标修改,通过转速实测值可以观察到转速实时跟随的性能非常理想。学生通过自行修改PI控制器的控制参数,观测不同比例系数和积分系数下的输出响应,便于学生结合理论课程的内容进行学习和分析,加深对理论知识的理解。
上位机的界面上还包括一些辅助功能,比如“暂停刷新”,方便学生暂停观察曲线的瞬时波形,便于对结果曲线进行分析,还可以将实时的电流、转速等数据以文件形式保存,方便学生后续对实验报告的数据处理与分析。
4 结束语
合理的实验平台的建设和实验环节是课堂教学的有益补充,能有效提高学生分析问题、解决问题的能力。建设兼顾实验教学的基础性、代表性,实验内容的综合性、设计性,以及实验平台的可持续发展性,是高校建设各类课程实验系统的核心和关键。
本实验系统基于Matlab/Simulink和LabVIEW软件技术,在构建了控制器的基础上建立虚实结合的电机转速控制实验系统,论述了本实验系统的可靠性和有效性。本实验系统所实现的可扩展设计操作简便、显示直观等优点能够满足教学实验的要求,改善了传统教学模式中统一化和验证性的固定实验模式,通过具有多样化和自主性的设计模式,建设了一个开放、多功能的虚实结合实验教学平台,是今后电机拖动与控制类课程实验教学发展的方向之一。
[1]张厚升,董硕,姜吉顺,等.基于Matlab/Simulink的直流调速系统虚拟实验教学[J].实验室研究与探索,2016,35(06):66-70.
[2]周晓华,李振强,张银,等.异步电机间接矢量控制系统虚拟实验分析[J].实验技术与管理. 2017,33(12): 117-120,149.
[3]蒋威,吴建华.基于Matlab和LabVIEW的电机控制系统集成开发[J].机电工程,2006,23(07):8-9,29.
[4]艾青,李时东.仿真技术在电力电子技术实践教学中的应用[J].科技与创新,2017,22:47-49.
[5]王慧,王毅,付超.Matlab和LabVIEW在电力电子虚拟实验中的应用[J].电气电子教学学报,2014,36(02):112-114.
[6]费红姿,范立云,费景洲,等.基于虚拟仪器的直流电机模糊PID控制实验研究[J].实验技术与管理,2015,32(03):81-84,96.
[7]李辉,王晓芳,林立,等.LabVIEW应用于控制类课程教学改革的探讨[J].电气电子教学学报,2016,38(06):150-152.
[8]李红利,修春波,马欣.“电机及拖动基础”课程教学改革研究[J].电气电子教学学报,2017,39(04):73-75.
[9]阮毅,陈维钧.运动控制系统[M].北京:清华大学出版社,2015.
2095-6835(2018)20-0061-03
G420
A
10.15913/j.cnki.kjycx.2018.20.061
湖北民族学院教学研究项目(编号:2014JY034)
李沁,女,博士,讲师,长期从事电力电子与电力拖动、电气信息检测等教学研究。
〔编辑:张思楠〕