未来机动性
2018-10-30
汽车自发明以来已经改变了整个人类的生活,特别是使人们的活动半径获得了极大的提高,一百多年来汽车为人类的移动出行提供了无限的空间。随着信息化和智能化的发展,人们正在改变汽车,正在重新发明汽车,特别是为未来的机动性,重新设计汽车。本文总结了德国智能互联技术改变人类机动性方面提供了参考。
1 充分发挥自动驾驶优势,为应对未来机动挑战提供解决方案[1]
即使经过120多年机动化,道路交通中的机动性还是面临许多挑战。可是似乎有必要在技术上开辟新天地。如今许多地方已有的交通基础设施非常拥挤,导致时间延迟,交通能源效率低以及经济成本下降。寻找停车位和拥堵不仅造成可避免的排放问题,而且仅在德国每年估计造成经济损失250亿欧元。此外,不断增长的电子商务将导致货运量的增加。
城市中,公共交通业务无疑是个人流动性不可或缺的基石之一。由于经济原因,大部分人不常使用出租车,新的移动出行服务如汽车共享,只允许拥有有效驾驶执照,刚在市场建立起来,其中一些移动服务在德国是不合法的,即使它们只提供经济实惠的出租车替代品服务。自动驾驶技术可以帮助到那些诸多挑战。表格1中对应VDI定义描述自动水平差别。

表1 自动驾驶级别[1]
文中FIGURE 1给出了信息处理链的示意图。传感器提供数据,这是描述驾驶状况和交通状况的基础。

FIGURE 1 Information process chain of automated driving functions compared to the human[1]
自动化驾驶所带来的挑战非常复杂,可以用5个层次来说明。文中FIGURE 3示出自动驾驶过程中,从5个层级模型描绘出人因素与其它自动化等级如何相互交融一块。
迎接以上所描述的的挑战作为未来移动出行继任者似乎有必要建立德国电移动出行国家层面战略平台。从技术层面既要有创新技术设计理念又要有网络手段。
2 公交车自主驾驶[2]
由于客运各种法律障碍,德国全国范围内的自主或自动驾驶目前不可行。然而,在非公共交通领域,今天已经可以想到各种应用。对于物流公司、公共交通站点和集装箱码头,操作程序的部分自动化为成本优化提供了机遇。
服务回来之后,公交车准备下一次当地公共交通站点派遣。停歇在站点需要做的工作有小维修检查,特别是车辆的加油、清洗。据在一家公交车站点调查,拥有大量公交车,大量运输和调配摆放工作量可以通过自动驾驶得到释放而且降低人工成本。使用标准技术确保公交车即可在站点也可在后来的公共道路自主驾驶。

Figure 1 Top view of the depot Stuttgart Galsburg with marking of the automatable operating sequences[2]
文中图1斯图加特公交站点地图示出认同的9个运行步骤。站点自主驾驶是自动驾驶首批步骤之一,因为驾驶区域受到限制而且免受交通规则限制。虽然车辆遵守公共道路运输的一般交通法规,但由路人或其他道路使用者引起的许多不可预见的情况被消除。由于处于封闭区域,不合格人员,例如行人或玩耍孩子不会成为问题。已确定斯图加特-盖斯堡站点作为自动驾驶示范点。为全市公交车总站提供市区公交车。表2示出9个运行过程所需平均时间。
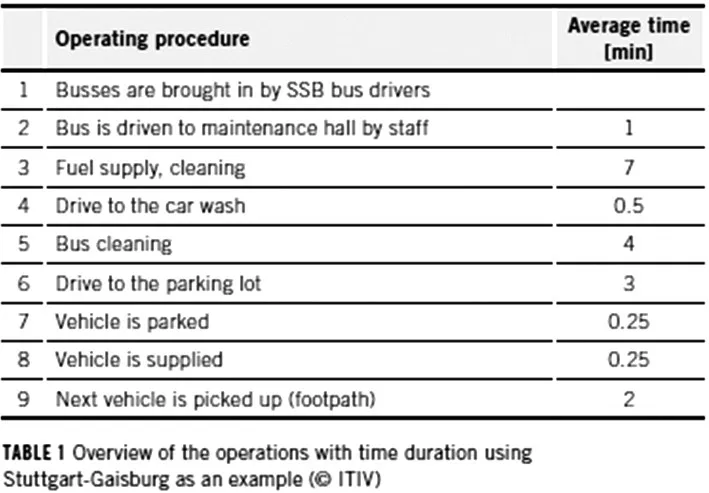
表2 9个运行过程评价时间[2]
为了确保自动驾驶的功能不受限于站点,该系统基于自主车辆标准技术而且与场地外的正常道路基础设施兼容。为公交车配备GPS、摄像机、雷达和超声系统可以解决有关加速、制动和转向方面的挑战。标准车辆已经包括用于位置检测、车道保持助力和安全距离警告传感器(图2)。

图2 用交通红绿灯标识停车道次[2]
自主公交车点提供巨大经济潜能。每天斯图加特盖斯堡服务总站面对150台公交车辆,每年如果采用自主驾驶可以节省人工成本10万欧元。比节省人工成本更重要的是增加运输产能。另外自动驾驶能够减少由于碰撞而引起的小的损伤。用于控制车辆的传感器和作动器已经足以应对运作站点并为自动驾驶提供基础。
3 开发数字世界中的移动出行[3]
汽车在上个世纪改变了世界,对其发展产生了决定性影响。今天世界的变化正在引起汽车业及其应用发生重大变化。
车辆互联和智能化正在高速向前发展。它们将使辅助系统能够有助于提高车辆安全性,舒适性和运行效率。自主驾驶会改变用户对车辆期望并生成车辆使用新的商业模式。能源部分的变化以及减少局部排放需求将提升汽车越来越多电气化。这些改变的边界条件需要整体的车辆开发方法。子系统设计的基础就是了解整车及其作为一个系统的环境,与其造型和人-机接口一起勾勒出一台车辆特性。主要子系统如动力传动系、热管理、底盘、电气系统以及车身和内饰必须满足结构和功能设计要求之外还要与车辆用户要求相匹配(文中图1)。在早期开发过程中,需要使用虚拟样机模拟预先设定好影响车辆属性,并在实际车辆操作短开发环路中经受试验和验证。在封闭环路中再使用现实试验中的结果作为模拟和车辆模拟器试验和子系统开发输入。动力系统与车辆开发链接允许利用先前未使用的潜力。
以合作方式完成对车辆衍生品或整车的开发。在使用前后一致的模拟环境下特别强调系统功能平面布置。车辆制造厂家正面临把多种推进系统集成到它们产品系列中并具有可接受的制造复杂度的挑战。从市场角度,每次车辆推进系统本身构架须具有竞争力。一方面对于诸如高压电池,动力系和位于车辆地板下排放系统位置发生任何折中都会影响车辆属性,另外一方面影响到车辆车身结构协同效果。动力系热系统以及车辆内饰也是整车重要一环。未来移动出行存在许多可能性,其特点即体现在动力系统解决方案的多样性以及互联性。为用户提供全方位解决方案变的越来越复杂而且要求车辆开发采用新方法。通过虚拟早期功能相互作用和车辆用户主观感知来优化整个子系统。由于内燃机技术不断进步,有可能假设未来由内燃机驱动的车辆不再对空气质量产生负面影响。这样就为所有推进系统之间打开新的竞争之路。从长远角度来看还会继续聚焦CO2排放问题。合成燃料为内燃机打开新的一扇窗。

图1 基于对车辆系统理解的车辆开发[3]
为了开发和验证,驾驶员辅助系统和自主驾驶要求大量场景。将来通过采用混合实际和虚拟开发环境获取完美开发成果。
4 从安全助力功能到远见和强化安全移动出行设计理念[4]
未来人们移动出行会基于不同运输模式组合,自主驾驶车辆将会发挥重要作用。而在农村地区,车辆主要还是由驾驶员操作和私人拥有,城市个人移动出行聚焦在用户可按需求定购的自主驾驶车辆上。这些无人驾驶车辆将由中央车队管理系统管控。它们不再由私人拥有,而是由移动提供商运营。

图1 未来城区内无人驾驶机器人出租车[4]
只有当车辆能够检测和诠释其周围环境时,才能实现自动驾驶。由此车辆须配备环境传感系统例如相机雷达或激光。如果一个传感器检测出障碍物,首先使用相关职能系统,有必要诠释该信息。环境检测和诠释领域正是需要做大量工作的地方。检测,诠释和安全反应要求计算能力。某些情况需要采用新技术和新方法例如人工智能。目前由司机承担的所有动作和监控职责将来须车辆本身承担来确保所有驾驶条件下其自身安全和可靠运行。如果司机使用该系统感觉安全,司机就会接受自动驾驶。
因为这些机器人出租车将完全取缔驾驶员作用。这样就会增大确保车辆和其周围生态系统通常由司机所能承担的责任技术挑战内容。这些远远超出了实际的驾驶任务。我们已经研究了道路状况检测问题,这是确保自主驾驶汽车安全运行的基本要求。如果世界主要城市街道到处出现自主机器人出租车迷人风景,这样的模块将只是模块和技术解决方案的完整系统的一个组成部分。Continental公司正在与知名大学合作开发多种形态自动驾驶系统并最终实现其解决方案的工业化进程(文中图1)。总之,很清楚一点自动驾驶对全球汽车供应商行业的主要参与者的创新能力提出了很高要求。Continental公司意识到其在这方面的责任,并积极应对挑战。通过这样做,我们正在为未来提供智能和可持续的移动出行铺平道路,同时为保持个人移动出行吸引力作出重大贡献。
5 激光雷达是自动驾驶和自主驾驶的关键技术[5]
虽然专家普遍认为,未来的汽车将会实现自动驾驶和自主驾驶,但问题何时和这类汽车如何看待当天的亮点依然是汽车行业的一个争论点。然而,像法雷奥这样的供应商正在准备第一批产品。汽车制造厂家认为利用激光雷达识别环境是朝向高和全自动驾驶方向行进的关键因素。普遍共识是,除了摄像头和雷达(以及近距离超声波)系统之外,自动化水平3和更高层次也需要激光雷达。专家同意这一评估,估计到2026年激光雷达传感器市场将增长到25亿美元。
通过推出Scala激光扫描仪,法雷奥公司向高度全自动驾车辆迈出一大步。它是世界上首台符合汽车行业产品设计,开发和制造工艺、验证及成本方面严格要求的3-D激光扫描仪。
2010年Valeo公司开始开发激光扫描仪(图1),其目标就是为大型汽车生产开发传感器,公司与激光雷达专家Ibeo签署专有合作协议。联合开发活动的目标就是创建一个宽泛检测范围、高分辨率和大视野系统。

图1 使用激光雷达测量方法的激光扫描仪[5]
在产品设计方面,主要挑战是确保可移动部件在整个工作温度范围(-40至+850C)内以及车辆常规震动情况下所需机械精度。即使是旋转镜垂直角上出现最小错误,在50、100或甚至200 m距离处物体测量点生成可测偏差。传感器以905 nm频率发射肉眼看不到的红外线激光束,按照DINEN60825-1认证为等级1激光。这就意味着激光扫描仪对人眼是安全的。根据这样一个等级分类,通过组合光束的功率和持续时间,意味着短光脉冲可以具有比不间断激光束更高的发射功率而且决定所需的最大光能量。
甚至产品引入市场前,Valeo公司开始对系统进行优化改进工作。到2020年,Valeo公司计划将系统推向系列成熟,这不仅包括捕捉车辆前方区域的激光雷达传感器,而且还包括整合来自几个激光传感器数据产生整车3600无死角。
为了确保顺利运行,激光雷达传感器前面板在冬天须没有任何灰尘和污垢,或雪。这就是为什么法雷奥公司开发了用于激光雷达传感器的Everview清洁系统以及用于传感器盘的专用加热系统。清洁系统配有一个带有多个喷嘴的小型伸缩臂,可根据需要自动启动,使传感器免受灰尘、泥土、雪和其它污染。这个传感器清洁系统到2020年实现成熟量产并由德国汽车制造厂家使用。
6 未来移动出行[6]
今天主流移动出行设计理念依然基于20世纪30年代所制定的未来愿景。未来模块化移动出行解决方案可能会废黜汽车成为主要交通方式。汽车行业目前正在努力将自己定位为移动服务提供商。
移动主要聚焦在地理移动,意味着大多数人被迫迁移,某种意义柔性化不要被绑在一个地方,大多数情况是从19世纪工业革命开始出现批量有限半径迁移,移动出行意味着去工作、交易度假或与家人团聚。自Carl Benz和Gottlieb Daimler发明轿车,为人们创造新的可能性。当时轿车广泛被认为是柔性化和个性化自由象征。
如果开发出一个新的移动出行愿景,它将包括以下内容:一个现代化的高速火车网络,智能基础设施,自动驾驶车辆以及城市中心低成本公共交通运输协调系统,特别是地铁系统。
未来,客户和用户将参与开发移动出行解决方案的业务模型。消费者越多地使用这些解决方案,它们就越能满足他们的需要。在某些方面,汽车行业目前可以比作传统电视。它提供几个观众没有任何影响的节目。然而,未来的汽车行业可能与互动互联网或邀请用户定制设置的视频游戏更加相似,但也允许它们主动影响或改变链接内容。用户对软件应用做出贡献,这为人们提供无限创新空间。这意味着,借助机器学习,他们正在训练它们的系统检测现实世界物品。乘客运输全球市场价值十万亿美元。这意味着充分利用人工智能,绘制物理世界的公司,最低故障率、受益良多。其创新潜能也许大于任何其它行业。
