欧洲汽车互联技术趋势
——2018欧洲互联智能驾驶汽车研究与创新论坛综述
2018-10-30
汽车互联技术总结:智能驾驶汽车的互联性仍处于起步阶段
·互联已经开始在汽车中应用;
·无法保证自动驾驶汽车可以依赖的V2X完全渗透;
·考虑到高度智能驾驶(AD)的要求,将需要新的互联技术标准
·扩展车辆和中立服务器的概念将被证明是一个很好的支持下一步互联智能驾驶(CAD)部署的重要举措。
未来发展趋势:
·使用现有的蜂窝网络技术;
·现有蜂窝网络技术+5G的混合通讯研究;
·收集数据和在实践中不断评估;
·需要建立更广泛的互联汽车联盟;
·需要市场驱动/以顾客为中心的解决方案;
·加强边缘计算研究;
·互联技术的实现为大规模服务创造了很大商机。
1 2018年5大数字化与信息化转型趋势[1]
(1)大数据,大机会:大数据将面临更大的变革,颠覆现有的商用模式,大数据将通过采用认知技术恢复暗数据(Dark data),帮助、保护企业免受数据泄露和欺诈的损害。
(2)AI将获得大发展:Forrester研究报告预测,人工智能的下一阶段都是关于转型、现实和实施,70%的企业计划在2018年实施人工智能,从2016年的40%上升,20%的企业将建立人工智能提供真实时间指示和决策,辅导员情绪智力的聊天机器人将被开发。
(3)5G在路上:根据高通公司的报告,最新的5G技术将在2018年继续引起更多关注,预计5G智能手机将于2019年上市,5G可能会把事情提升到一个全新的水平,下载速度难以达到-10 GB/s比4G快。
(4)区块链释放全部潜力:区块链是Gartner网站上第二大搜索频率最高的词汇,搜索量增长了400%,Deloitte预测区块链技术可能会很快超过其他技术,如云计算,数据分析和风险投资中的物联网。
(5)边缘计算正在发展:业内人士预测,到2020年,政府和企业将使用56亿台物联网设备进行边缘计算和分析,预计企业将在其基础设施中使用边缘设计模式,主要是那些具有重要物联网元素的企业。
2.汽车生态构架

图1 汽车数字化云生态构架[2]
普华永道2017年战略与数字化汽车报告中提出了汽车数字化云生态系统[2],其框架主要包括物理层、服务层、商务层和伙伴支撑层(图1):
物理层面:包括了汽车日常活动场景,如接、送、EV充电、出发和到达,自动泊车等活动。
服务层:支持上述汽车日常活动的服务,如接、送,EV充电、到达通知,自动泊车等,包括了数千种服务。
商务层:多种货币的数字化的商务模式
伙伴支撑层:上万个商业伙伴支撑汽车社会的信息化。
这样的汽车生态框架,对于汽车主机厂(OEM)意味着复杂性呈现几何级增长,信息量也是几何级增长,面对这样复杂的汽车生态,全球汽车OEM必须为此做好面对巨大商机的战略布局和战术研究。
Jaime Moreno也提出了新的生态系统[1]:新生态的使用者包括驾驶人员、OEMs和交通服务提供商。新的生态系统应关注服务,前提条件是建立模型进行可能性的研究,需要大规模示范和部署。
2.1 信息通信技术(ICT-Information Communication Technologies)关键技术(4级自动驾驶)[3]:(Dr.Angelos Amditis.V2X Connectivity for AD)
混合联通;
数据管理;
网联安全;
数据保护;
精准定位。
2.2 不同的通讯技术确保通讯可靠、可用和冗余
·ITS 5G:成熟,标准可用,低延时……;
·Cellular:成熟、不适合汽车需求,延时长,新的5G和技术促进者推动mMTC,URLLC,……;
·LTE-V:新技术,成本有效,在现有的基础设施上部署…….
2.3 灵活的网联构架:
·兼容不同的计算类型,如云计算、MEC;
·适应不同的使用案例和服务的不同需求;
·应按照不同智能驾驶应用级别的性能和适应要求定义网络的“切片”。
2.4 通讯技术功能要求[3]
·协同感知数据的周期广播
传感器:位置、速度、加速度等,(10Hz);感知:占位网格(2Hz);
控制:目标轨迹、速度和加速度,组成(2Hz)
·基于事件的协同机动数据广播
自主变更车道协商(Ad-hoc lane change negotiation)
交叉路口优先权需求/分配·数据质量要求:
绝对定位精度(<0.5 m)
·延时要求:
端到端延时<100 ms,高度动态数据;端到端延时<200 ms,机动协商
3 汽车为中心的云和物联网

图2 汽车为中心与云平台[4]
Francois Fischer提出了以汽车为中心的云平台构架(见图2),基于蜂窝技术的汽车数据融合包括车载传感器、局部动态地图、自动驾驶功能、车联网平台和通讯技术接口,而通讯(4G-ITS-5G,LTE-V2X)与互联网接口,个人移动设备、交通信号灯、自行车、道路维修建设等通过互联网与车通讯。
3.1 新的连接范例:云和物联网[4]
·V2X方法-车辆中心
·范围有限:仅具有兼容连接的设备
·有限的功能-关闭连接的设备多样性-“仅仅”数据(无过滤/增强)
·云物联网方法-作为服务提供的已提升数据·连接不可知
·语义增强设备表示(元数据)
·2级管理:设备和上下文
·上下文管理中的“增强”数据表示
·例如。交通堵塞或其他危险/交通:来自个别物品数据的环境事件
·轻松跨域服务集成-聚合
·标准化数据模型-平台开放-更高的网络安全性

图3 汽车互联和云平台[4]
云平台和物联网包括了IoT生态、IoT云平台、应用层和服务层(见图3),其中IoTs生态圈包括:
按IoT标准协议,目标提供给互联网平台数据;
在IoT平台上创建虚拟的目标;
AUTOPILOT IoT平台从其数据源的数据开发应用;
AUTOPILOT应用服务可以支持智能驾驶。
IoT平台内容包括:
互操作;
标准化
信息安全
免费开发
应用类型包括:
·自动代驾泊车;
·高速公路自动驾驶;
·编队行驶;
·城市驾驶。
服务类型包括:
·自动驾驶路径优化;
·城市代驾服务(为游客);
·电子驾驶证;
·自动驾驶用高清地图;
·共享汽车实际时间;
·第六感驾驶;
·无人驾驶汽车再平衡;
·动态eHorizon。
3.2 物联网用于自动驾驶的前景
·当前使用案例(AUTOPILOT)
增强AD DDT和RT HD地图更新的驾驶环境感知
为移动性提供SaaS/PaaS(OEM车辆管理平台或MaaS)
·未来的用途
·受云中未来IT功能的驱动:例如:AI
·未来的蜂窝网络性能支持;
·Massive IOT为AD功能提供更多信息-(mMTC);
·更高的数据速率(eMBB),允许高容量数据表示(视频);
·较低的延迟(URLLC)和MEC启用;
·在车辆中使用IoT进行RT DDT,并将DDT与基础设施控制结合使用。
·计算和网络性能与自动化级别之间关系的影响;
·通过智能设备管理提高连接性。
4 基于蜂窝网络的统一的V2X完整的解决方案

图4 基于蜂窝网络统一的V2X完整解决方案构架[5]
爱立信提出5G汽车通讯的统一完整的解决方案(见图4),V2X蜂窝网络基础设施的目标是:一是在网络覆盖范围内长距离可以达到装置互联;二是长距离蜂窝网络技术已经在汽车技术上实施(短期可以获得效果),汽车通过V2I与多种云互联。
V2网络和云,包括OEM云、OTT云、C-ITS云和路边基础设施云,这些云是互联的,并与各服务提供商连接。
V2X短距离连接可以实现:
·单独操作,不需要蜂窝网络服务
·免费连接到长距离蜂窝技术(可用,低延时),基于充分的市场渗透率。
4.1 5G汽车通讯技术一般要求[5]
-汽车要求
本地化精确定位,最小车距,移动性,相关区域等。
-网络要求
·可用性,通信范围,数据速率,延迟,可靠性,服务
数据单元大小
·可以从不同的角度考虑延迟(对于
不同的用例),例如基于层和端到端的延迟-定性要求
成本、功耗、安全性
4.2 5GCAR研发目标
·研发5G V2X系统构架;
·与不同的无线接入技术形成网络;
·开发高效安全的和大规模的侧连接接口
·5G辅助定位技术
·识别创新业务模式;
·展示和确认研发的V2X概念;
·形成5G V2X标准和法规;
·将5GCAR概念与5G PPP集成
4.3 5GCAR研发方法
A:定义V2X场景、需求和KPIs;
B:设计和确认创新技术解决方案;
C:验证感念并进行展示,展示3个先进的V2X使用场景:
汽车行驶并线;
多个互联车辆机动协同感知;
弱势道路使用者保护
4.4 5GCAR开发内容:
·5G V2X商用模式;
·5G V2X型谱;
·5G V2X基于基础设施通讯;
·5G V2X测链接通讯
(1)端到端延时,<5 ms
(2)超高可靠性,接近10-5
(3)非常高密度的互联车辆;
(4)定位精确(RVUs:10cm,车辆:30cm)
·5G V2X定位
·用于V2X的5G构架;
·展示5G V2X。
5 通过人工智能和互联技术实现汽车智能驾驶

图5 人工智能和汽车互联促进汽车智能驾驶[6]
德国博世公司的David Weidenfelder提出了人工智能和汽车互联技术促进汽车发展的技术路线(见图5),即基于感知和精确定位的基础上,车载大脑(感知数据融合+软件冗余设计)与安全驾驶和车载计算机,形成决策机制,采取集制动和/或转向行动,包括对动力系统的控制,这里冗余设计是完整传感、思考和采取行动的关键。
博世提出的互联汽车技术的核心是其博世雷达道路自动签名系统,该系统可以精确到厘米级,可以弥补摄像技术的不足,创建局部高清地图和精确位置,通过与伙伴云和主机厂云的高精地图同步实现精确定位。
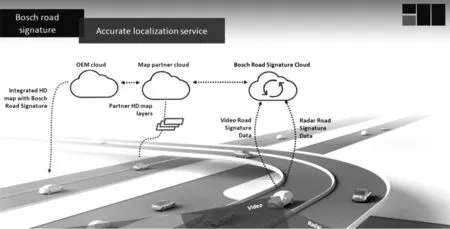
图6 汽车雷达自动签名与精准定位[6]
6 结束语
本文基于2018欧盟互联智能驾驶汽车研究与创新论坛,总结了欧洲汽车互联技术发展趋势,包括了基于蜂窝网络技术和5G技术的现状与发展趋势,总结了数字化信息化发展趋势,介绍了数字化、信息化汽车云生态构架,总结了汽车互联技术,特别是高度智能3-4级驾驶技术对通讯网络和汽车网络的技术要求,特别是欧洲在5G与汽车网络技术现状和未来发展趋势,包括5G开发目标、方法和内容。文章最后也总结了博世公司汽车雷达自动签名与精准定位技术,本文最后作为附表,列出了互联汽车互联性能技术要求(附表1)和博世互联汽车计算能力要求(附表2)
7 附表

附表1互联汽车互联性能技术要求[7]

附表2 互联汽车计算能力计算要求[6]
[1]Jaime Moreno.CONNECTIVITY–Spanish approach(Presentation).Interactive Symposium on Research&Innovation for Connected and Automated Driving,2018.4.19-20.
[2]PwC.The 2017 PwC’s Strategy&Digital Auto Report(R).www.strategyand.pwc.com
[3]Dr.Angelos Amditis.V2X Connectivity for AD.Interactive Symposium on Research&Innovation for Connected and Automated Driving,2018.4.19-20.
[4]Francois Fischer.Automated driving Progressed by the Internet of Things.Interactive Symposium on Research&Innovation for Connected and Automated Driving,2018.4.19-20.
[5]Mikael Fallgren.Interactive Symposium on Research&Innovation for Connected and Automated Driving in Europe.Interactive Symposium on Research&Innovation for Connected and Automated Driving,2018.4.19-20.
[6]Dr.David Weidenfelder.Enabling automated driving with artificial intelligence and connectivity.Interactive Symposium on Research&Innovation for Connected and Automated Driving,2018.4.19-20.
[7]BSDB CHRISTAIN ROUSSEAU.CONNECTIVITY NEEDS FOR DIFFERENT APPLICATION.Interactive Symposium on Research&Innovation for Connected and Automated Driving,2018.4.19-20.
