高原特长隧道驾驶人动态决策跟驰模型与限速研究
2018-10-29胡立伟胡澄宇
胡立伟,陈 政,张 婷,胡澄宇
(1.昆明理工大学交通工程学院,昆明650500;2.云南省交通规划设计研究院/陆地交通气象灾害防治技术国家工程实验室,昆明650011)
0 引 言
隧道由于其特殊的管状结构,其内部行车环境较差,虽然隧道路段交通事故率低于普通道路,但所发生事故的严重程度却较高.同时,隧道长度的不同,其事故特征也存在较大差异,其中短隧道(长度≤500 m)在进口路段发生事故的概率较高,而长隧道(长度≥1 000 m)在出口路段发生交通事故的概率较高.
隧道洞口附近照度的剧烈变化是隧道路段行车舒适性较差的主要原因,当照度变化超出驾驶人视觉适应能力时,将造成瞬间致盲的“视觉震荡”现象[1].在隧道进口及出口分别表现为“黑洞效应”和“眩光”.且随着隧道内行车时间的增加,驾驶人在隧道出口处受“眩光”的影响更为强烈.这种隧道洞口光线照度变化对驾驶人的影响在高原照度强烈的地区将会更加明显.
由于隧道内部不能换道的规则限制,造成在隧道内及进出口附近路段车辆大多处于跟驰状态.陈磊等通过对我国高速公路隧道事故形态的研究,发现追尾是隧道内的高发事故形态[2].追尾事故的发生是由于跟驰车辆没有与前车保持足够的跟驰距离.Wilson[3]通过对跟驰状态的稳定性研究,发现微小因素的改变可以导致震荡状态的剧烈变化.因此隧道进出口照度的剧烈变化等因素会加剧交通流的不稳定状态.目前隧道跟驰数据大多采用视频数据采集方法,J.S.Yeung[4]等利用隧道内摄像头,得到了隧道不同路段、不同前车类型时的车速—跟驰距离特征.虽视频采集数据的方法可以研究隧道路段车速与跟驰距离的变化特征,但缺少车速与跟驰距离的连续变化特性,难以体现驾驶人在行车中的决策过程.
因此,本文在既有研究的基础上,通过实车试验的方法,采集高原特长隧道路段车速与跟驰距离数据,研究车辆跟驰特性及跟驰过程中驾驶人行为决策机理,为改善高原特长隧道路段行车安全提供理论依据.
1 数据采集
本文以云南省境内麻地箐隧道(全长3 085 m,属特长隧道)为例开展研究.为研究特长隧道路段跟驰特性及驾驶人跟驰过程中的决策行为,对隧道路段试验车辆进行了跟驰车速、跟车距离及驾驶人眼部照度进行记录.
1.1 试验公路隧道的选取
麻地箐隧道平均海拔1 895 m,是云南省境内的特长隧道,该隧道为单洞双线2车道,隧道内有照明,在隧道进口前500 m处设置有隧道警示标志,隧道内限速80 km·h-1,该试验隧道路段交通组成如表1所示.

表1 试验路段交通组成Table 1 Traffic composition in test road
1.2 试验驾驶人
考虑到实车试验的危险性,驾驶人选取45名驾龄5年以上,矫正视力均在5.0以上,对道路熟悉程度一般,拥有C照驾驶证的男性驾驶人,使用同一车辆各进行2次实车试验.
1.3 试验时间
由于隧道路段在晴朗天气事故率较高,且照度强烈也是高原地区特征,所以试验时间选在晴朗的白天,经照度仪测得隧道外部照度为110 457 lux.
1.4 试验车辆及试验仪器
试验车型选用小汽车,实验仪器包括:激光测距仪、GPS、行车记录仪、非接触式五轮仪、照度仪.
1.5 试验过程
本文数据采用实车行驶的实时数据采集,由于试验车为小汽车,在车道上都选取内侧车道行驶.在试验车中成员使用仪器对跟驰距离、路段位置、车速、驾驶人眼部照度进行记录,共得到90组实车试验数据,剔除由于车辆出现换道或汽车超速行驶导致的非跟车状态的情况,保留有效数据76组.
2 隧道路段划分及驾驶人决策分析
由于试验测得的跟驰数据空间跨度较大,为对高原特长隧道路段跟驰特性进行准确分析,发现其在不同路段位置的变化规律,对高原特长隧道路段使用分段—聚类法进行分段.
2.1 曲线快速分段法
曲线快速分段法[5]基于时间序列,依次选取样本数据,并计算该样本与之前所有样本数据的均值之差,通过设定的固定判别值,比较均值差大小来决定该点的归段情况,直至所有采样点归段结束,并通过改变车速与跟驰距离的初始判别值σ0,ω0来调整归段个数.
对高原特长隧道路段跟驰车速vi及跟驰距离di利用曲线快速分段法,流程图如图1所示.
2.2 K-均值聚类法确定分组数量
聚类的目的是将分段结果(z1,z2,…,zs)归为K类,使得类内各数值接近,其中K为隧道路段分组数.

式中:cr表示第r个聚类中心;zi为数据点;K为聚类数;d(zi,cr)表示数据点zi到聚类中心cr的距离;D为每一个数据点zi与其最接近的聚类中心的距离平方和.
高原特长隧道分段示意图及各路段车速、跟驰距离及驾驶人眼部照度的变化分别如图2和图3所示.
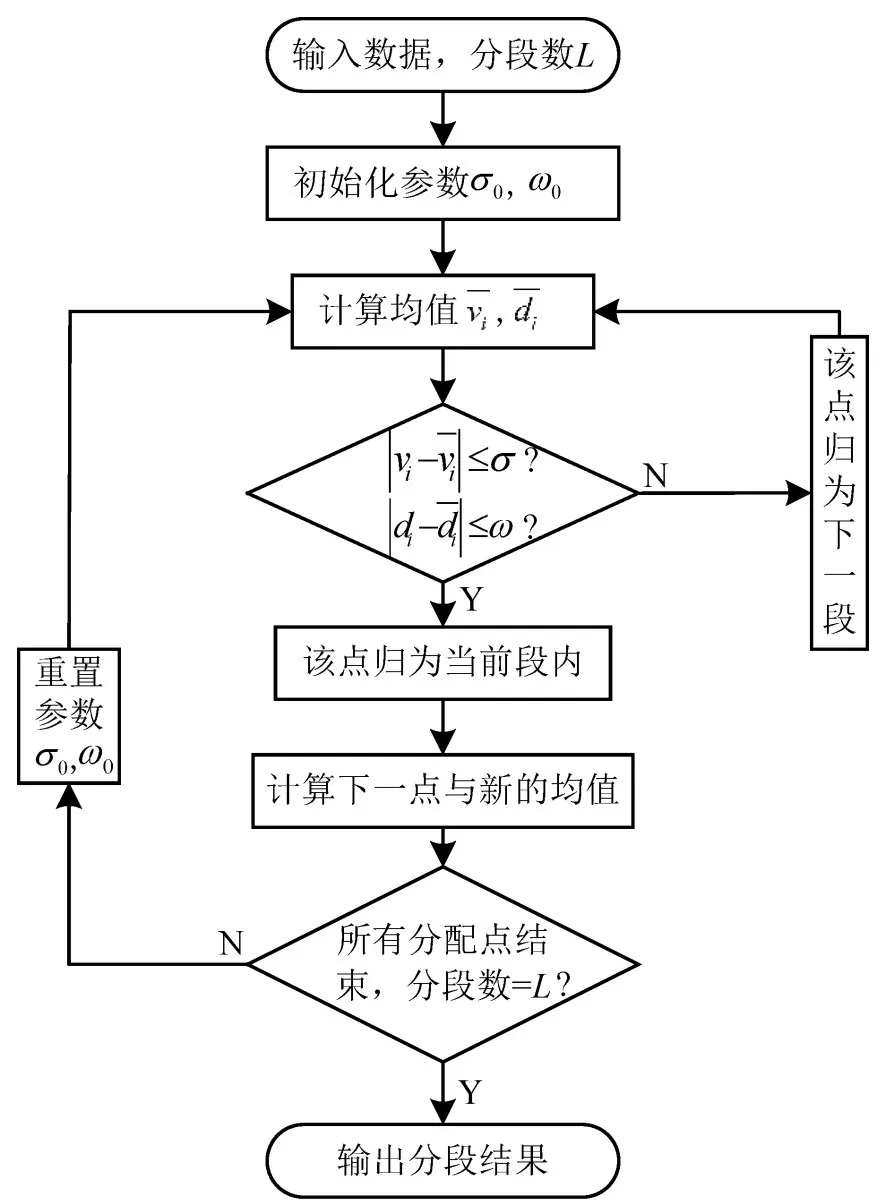
图1 曲线快速分段法流程图Fig.1 Flowchart of fast load curve partitioning method

图2 高原特长隧道分段示意图Fig.2 Section diagram of extra-long tunnel in plateau
从图3中可以看出车速在隧道进口前100 m位置出现了剧烈的减速阶段,伴随着跟驰距离快速增大;进入隧道后车速与跟驰距离趋于平稳;在距离隧道出口50 m处,车速与跟驰距离出现较大波动,具体表现为车速开始快速下降,行至隧道出口处急剧上升,并在隧道出口过渡段趋于平稳,跟驰距离先是快速上升,直到隧道出口出现急速下降,并于出口外400 m开始趋于稳定.

图3 高原特长隧道各路段车速、跟车距离及照度变化Fig.3 Speed,following distance and illumination changes in plateau extra-long tunnel
2.3 隧道路段驾驶人加减速决策行为
在隧道路段由于行车环境变化造成驾驶人在不同环境下驾驶行为也会发生改变,驾驶人通过观察前车的运行状态及行车环境变化,判断前车运行状态及行车环境的变化是否满足需求(安全、快慢等),并通过加减速改变驾驶车辆的跟车状态.
考虑不同跟驰距离、车速差对驾驶人加减速决策的影响,本文用前后两车的车速差与跟驰距离的比值θ表示跟驰车辆的行车状态.

式中:θ为跟驰车辆行车状态;dv为车速差;vN+1为跟驰车辆车速;vN为前车车速;d为跟驰距离.
基于实车试验采集的行车数据,分别从跟驰车速小于前车和大于前车的两种情况对隧道不同路段的不同行车状态的驾驶人进行加减速行为分析,驾驶人加速度模型及变化曲线分别如表2,表3,图4和图5所示.
当跟驰车速小于前车时,在隧道进口过渡段及隧道出口过渡段,由于行车环境较为良好,驾驶人通过加速来减少跟驰距离的意愿更为强烈.而在隧道出口段、进口段及出口临近段,即使跟驰车辆拥有与前方车辆相同的车速,驾驶人也有选择减速来增加跟驰距离的意愿.

表2 跟驰车速小于前车时驾驶人加速度变化函数Table 2 Driver's acceleration change function when following car's speed lower than leading car

表3 跟驰车速大于前车时驾驶人加速度变化函数Table 3 Driver's acceleration change function when following car's speed higher than leading car
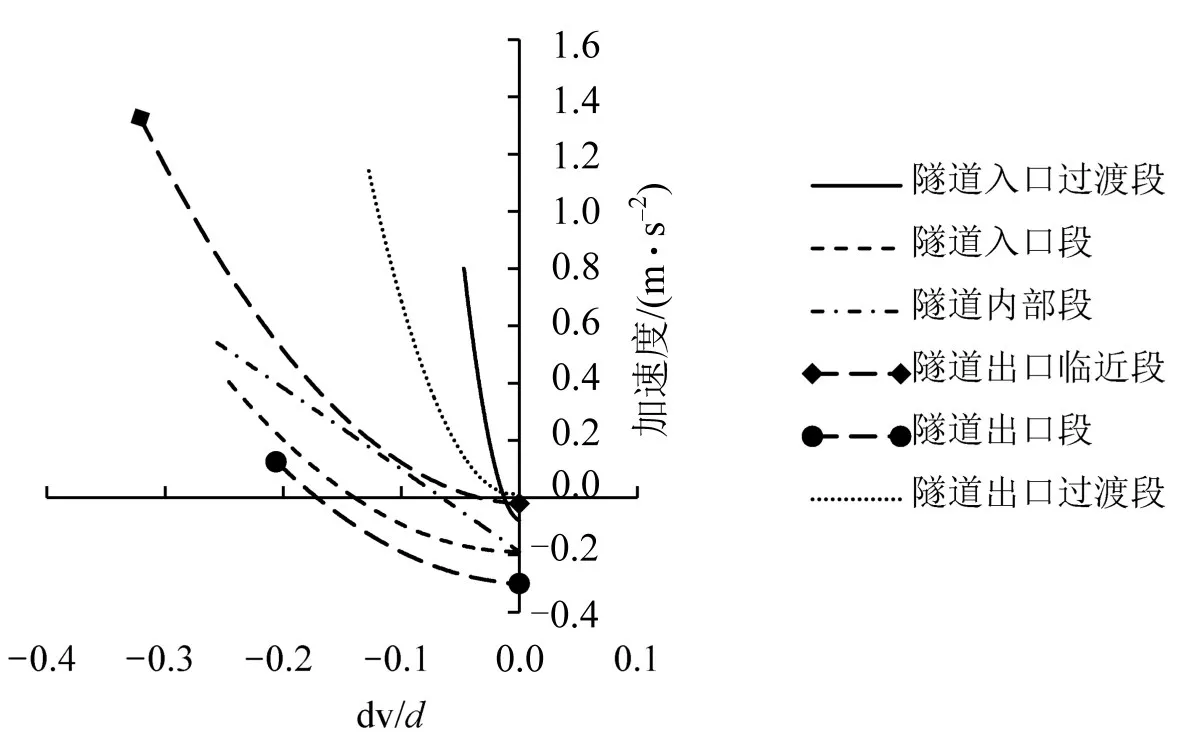
图4 跟驰车速小于前车时驾驶人加速度变化曲线Fig.4 Acceleration curve of driver when following car’s speed lower than leading car

图5 跟驰车速大于前车时驾驶人加速度变化曲线Fig.5 Acceleration curve of driver when following car’s speed higher than leading car
当跟驰车速大于前车时,驾驶人在隧道出口临近段及隧道出口段,对速度的变化更为敏感,且减速程度远大于跟驰速度小于前车状态的减速程度,表明驾驶人警惕程度较高.
由于车辆的加减速度有极限值,而图4和图5中的函数模型是基于在试验中测得数据建立的,在车辆加速或减速性能达到极限值时,无论θ如何减小或增加,加减速度的取值都为极限值.
3 基于局部最优的驾驶人动态决策跟驰模型
3.1 局部最优定义
在隧道路段的跟驰过程中由于前车速度及行车环境的不断变化,跟驰车辆驾驶人无法对整个隧道行驶过程中前车的运行状态及隧道环境变化情况进行准确预测,从而难以从全局最优的角度研究其最优跟驰行为.但从局部最优角度来看,跟驰车辆驾驶人通过观察前方车辆及交通环境,对前车下一时刻行车状态及环境变化进行大概率的预测,从而调整自己下一时刻的车速,能较好地仿真驾驶人最优决策行为.
驾驶人在跟驰行驶的过程中,会考虑其行程时间及行车的安全性,若保持的跟驰距离过大,虽然安全方面得到了保障,但是速度较慢,导致时间效用较低;反之速度过快,则行车的安全性得不到保障.因此在保证行车安全的情况下,从时间效用及安全效用两方面对跟驰车辆的效用进行分析.其中时间效用及安全效用分别通过跟驰车速、跟驰距离体现.
3.2 基于安全跟驰距离模型的效用最优函数
隧道路段行驶时,驾驶人对前车与行车环境进行判断,然后采取措施,车辆跟驰情景如图6所示.
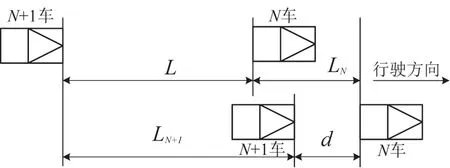
图6 车辆跟驰情景图Fig.6 Diagram of car-following behavior
为了保障行驶安全,驾驶人的车速应当满足安全条件:
式中:dmin为当前跟驰车速情况下的最小安全跟驰距离;d为跟驰车辆的跟驰距离;LN+1为N+1车制动刹车距离;LN为N车制动刹车距离;β为车辆停止后N+1车与N车的距离,一般取值2~5 m.
跟驰安全距离考虑前车处于匀减速制动状态这种最危险的情况,得到最小安全跟驰距离为

式中:β0为驾驶人期望安全距离,取5 m;tr为制动迟滞时间,取1.5 s(判断时间0.8 s,运行时间0.7 s);ta为隧道进口处暗适应时间(取实验均值0.61 s)或在隧道出口处明适应时间(取实验均值0.89 s);AN+1与AN分别为N+1车与N车的最大减速度,取7m·s-2.
分析式(6),当车辆处于跟驰状态时,其两者速度相差较小,即将vN+1和vN视为两个近似相等的值,同时不考虑两车减速性能差异.进一步得到小汽车跟驰行驶时的最小安全距离为

3.3 基于感知速度的效用最优函数修正
由于驾驶人在行车过程中受道路线形、速度及照度等因素影响,对行车速度的感知会产生偏差,从而影响其对行车风险的判断[6].因此需通过驾驶人感知速度特性对跟驰车速值进行修正.
因麻地箐隧道路段道路线形近似平直路段,隧道外部路段设为白天行车环境,隧道内设为夜间行车环境,引用文献[6]中模型,修正平直路段白天及夜间的感知速度与实际行驶速度差异,模型为

式中:vdf为白天驾驶员感知速度;vnf为夜间驾驶员感知速度.
隧道外行车路段跟驰车速通过式(10)进行修正,而隧道内部行车环境近似夜间行车,因此根据式(11)对隧道内部跟驰车辆速度进行修正.

式中:Δvo为隧道外驾驶人速度感知偏差;Δvi为隧道内驾驶人速度感知偏差.
通过对隧道路段跟驰车速进行修正,得到驾驶人的感知速度,即

式中:V为隧道路段理论最优跟驰车速修正值;Δv为驾驶人速度感知偏差.
则驾驶人局部效用最优的车速—跟驰距离函数为

驾驶人局部效用最优车速—跟驰距离曲线(黑线)与试验采集驾驶人各路段的车速—跟车距离变化(灰线)规律如图7所示.
3.4 基于局部最优的驾驶人动态决策跟驰模型
从局部最优的角度,通过安全跟驰距离模型及驾驶人速度感知模型建立局部最优的车速—跟驰距离函数,作为当前车行车状态及行车环境发生改变时驾驶人决策目标函数,跟驰车辆驾驶人通过加速或减速行为,使车速与跟驰距离向最优的状态进行不断修正.基于局部效用最优的驾驶人动态决策流程如图8所示.

图7 局部最优车速—跟驰距离变化Fig.7 Local optimal speed and following distance change
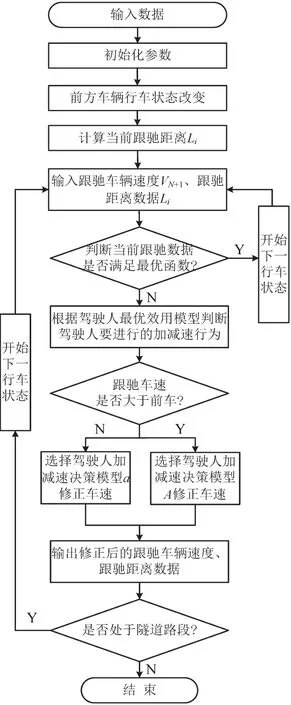
图8 基于局部效用最优的驾驶人动态决策流程图Fig.8 Dynamic decision flowchart of driver based on local utility optimal
3.5 实例应用
以本次试验高原特长隧道路段隧道采集的车速均值作为前方车辆N行驶状态,通过仿真计算,得到跟驰车辆在隧道路段上的跟驰数据.以隧道进口外500 m作为路段起点,跟驰车辆初始输入数据为此处试验采集的车速均值及当前车速下的最优跟驰距离,分别为77.5km·h-1,140 m.
利用Matlab进行仿真计算,得到仿真跟驰数据如图9所示.
从仿真数据中可以看出,仿真跟驰车辆通过控制自身车速使自身的实际的跟驰距离围绕当前车速的最优跟驰距离上下波动,表明驾驶人是向最优跟驰状态进行不断修正的.
3.6 模型检验
通过车速离散度对局部最优的驾驶人动态决策跟驰模型进行稳定性检验,计算仿真车速离散度并与试验车速离散度进行比较,发现跟驰模型的仿真车速离散度小于其跟驰的前方车辆的离散度,因此得到局部最优的驾驶人动态决策跟驰模型稳定性的结论.仿真车速离散度数据如表4所示.

表4 仿真跟驰车速离散度Table 4 Simulation of following speed dispersion

图9 仿真跟驰数据曲线Fig.9 Curve of simulated following data
3.7 限速值确定
由于仿真的跟驰车辆驾驶人在跟驰过程中在每一行车状态保持最优车速(即最高安全车速).因此取高原特长隧道各路段仿真跟驰车速的最大值作为各路段的最高限速值.高原特长隧道各路段最高限速值如表5所示.

表5 高原特长隧道最高限速值Table 5 Maximum speed limit value in plateau extra-long tunnel
4 结 论
本文基于高原特长隧道实车试验采集的驾驶人跟驰数据,得到车辆在隧道路段的跟驰特性及驾驶人加减速决策行为,并以驾驶人局部效用最优为出发点,结合安全跟驰距离模型、驾驶人感知速度模型及驾驶人决策模型,构建了局部最优的驾驶人动态决策跟驰模型,仿真驾驶人在高原特长隧道路段上的最优决策,并将最优决策速度作为该隧道路段的限速值.本文构建的驾驶人动态决策跟驰模型能较好地仿真驾驶人在隧道路段上的最优决策,可以为高原隧道路段的安全设施布设及限速值优化提供参考和技术支持.