基于行驶稳定性的山区公路弯道最小半径优化
2018-10-29杜豫川姚红云
岳 雷,杜豫川*,姚红云
(1.同济大学道路与交通工程教育部重点实验室,上海201804;2.重庆交通大学交通运输学院,重庆400074)
0 引 言
合理设置山区公路弯道路段设计指标是保障交通安全的关键.从起初基于设计车速的设计方法,根据整车受力安全要求确定最小半径设计指标,到现在各国主要采用运行车速设计方法来动态调整设计指标设置.法国、日本等还细分了道路等级,对应不同安全要求来确定设计指标值[1].国内外学者以实测数据或仿真模拟分析为手段,建立了大量运行车速预测模型及对应的设计指标参考值.此外,还有研究从事故统计数据出发,研究弯道最小半径、曲率、超高等设计指标与事故概率的数学关系等,并从安全评价角度出发,以运行速度协调性、线形指标的一致性等为约束条件,对弯道设计参数进行优化[2].另一方面,有学者从车辆行驶性能出发,分析弯道半径、超高、道路宽度等因素对车辆运动轨迹的影响,进而提出与车辆参数相对应的设计指标优化建议[3].而近年来还有学者关注以人为本,分析道路设计指标对驾驶行为和驾驶员心里特征的影响,以全面提升弯道设计的舒适性及安全性[4].
但总体而言,这些研究大多针对高速公路,同时建立的运行车速预测模型,以及设计参数与事故概率关系模型等受数据采集地域影响较大,结论难以直接应用于山区公路设计实际.而本文回归事故机理,车辆失稳始终是事故的直接原因,针对山区一般等级公路弯道特征,基于优化的车辆行驶稳定性分析模型,在确保行驶安全要求下研究弯道设计参数受车辆参数的影响规律,进而提出不同条件下山区公路弯道最小半径优化指标.
1 基于行驶稳定性的弯道路段安全模型构建
1.1 弯道行驶多自由度动力学分析
车辆多自由度动力学分析模型可综合反映车辆行驶状态.从Segal教授建立的经典3自由度分析模型开始,随着车辆工程的发展更多模型被研究建立,例如美国D.J.Segal教授建立的17自由度模型,国内靳立强教授建立的18自由度动力学模型,郭孔辉院士建立的26自由度模型等[5],模型自由度越高越能准确而全面反应车辆行驶动力学响应,但如此复杂的分析主要用于车辆工程研发.本文仅研究车路参数对于行驶稳定性影响,在兼顾模型准确性与适用性基础上,采取车辆纵向、横向、横摆运动,以及4个车轮转向运动共7个自由度来全面描述车辆行驶状态.建立图1所示弯道受力模型:弯道超高为β,车辆前进方向为x轴,垂直前进方向为y轴,v为汽车纵向速度(m/s);u为汽车侧向速度(m/s);γ为汽车横摆角速度(rad/s);δ为汽车前轮转角(rad);m为汽车总质量(kg);Lf、Lr分别为前后轴距(m);Fxfl、Fyfl、Fxfr、Fyfr、Fxrl、Fyrl、Fxrr、Fyrr分别为左前轮纵向力、左前轮侧向力、右前轮纵向力、右前轮侧向力、左后轮纵向力、左后轮侧向力、右后轮纵向力、右后轮侧向力(N);B为轮距(m).
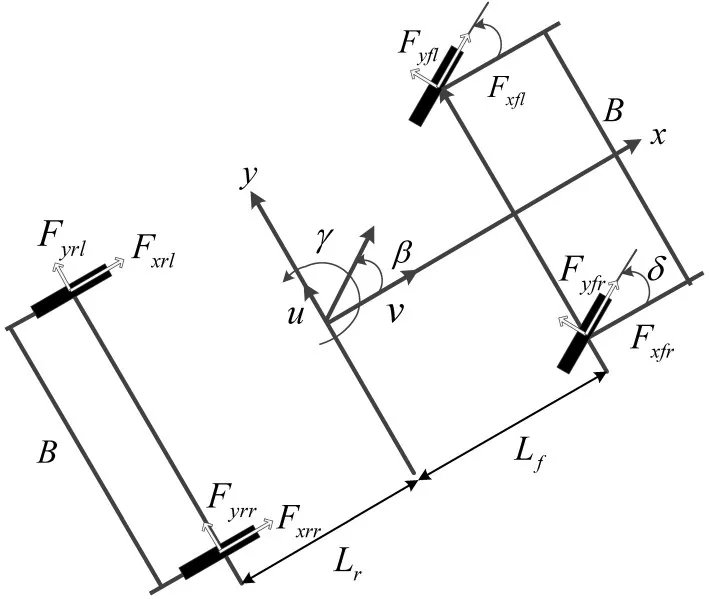
图1 车辆弯道行驶受力分析Fig.1 Force analysis of vehicle on curve
建立车辆在纵向、侧向上的动力学方程为

式中:v˙为汽车纵向加速度(m/s2);u˙为汽车侧向加速度(m/s2).

车辆与道路的相互作用是通过轮胎与地面的接触来实现的,车轮垂直荷载直接与弯道事故形态相关.将轮胎简化为Dugoff模型[6],当弯道有超高时叠加由此造成的荷载转移量,计算轮胎的垂直动荷载随汽车加速、转向、制动等行驶工况的变化情况为
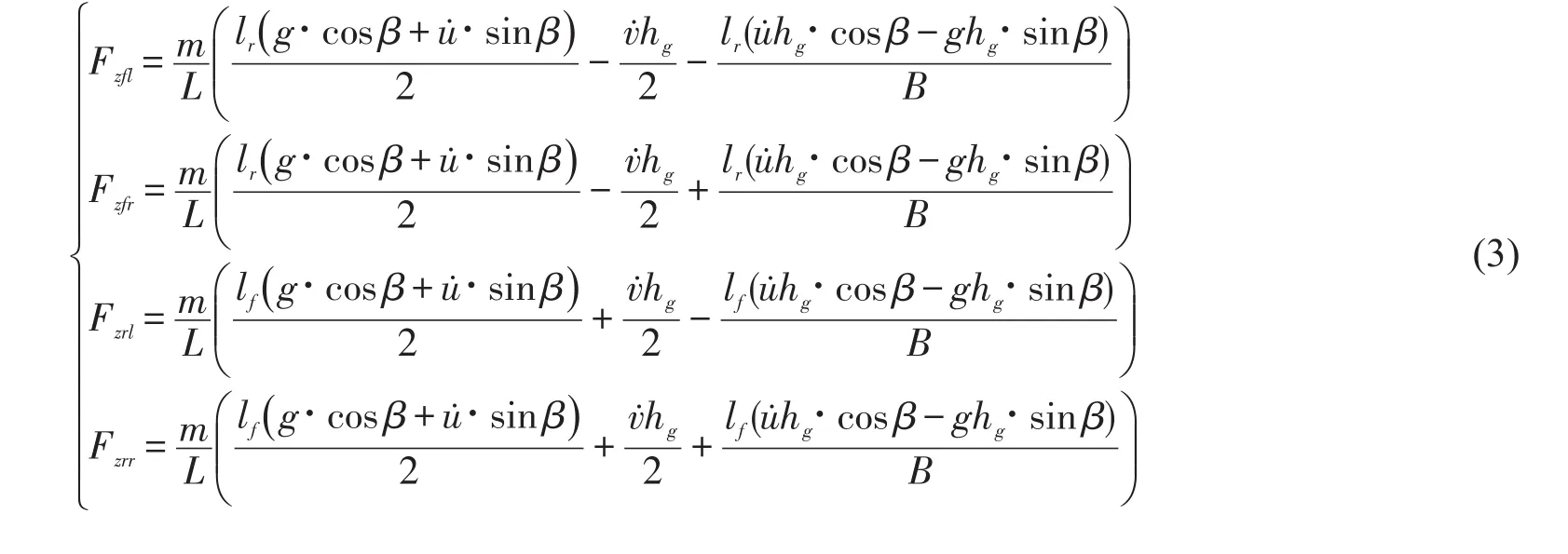
式中:Fzfl、Fzfr、Fzrl、Fzrr分别为左前轮、右前轮、左后轮、右后轮垂直荷载(N);hg为质心高度(m);lr+lf=L为轴距.
轮胎的侧偏现象、车辆的加减速状态都对轮胎的受力产生影响,车辆转向时外侧轮胎垂直载荷较内侧轮胎垂直载荷大,而当车辆减速时前轮垂直载荷增大而后轮垂直载荷变小,车辆加速时后轮垂直载荷增大而前轮垂直载荷变小.
1.2 弯道最小半径指标分析
弯道设计中最小半径是其核心指标,根据车辆在弯道事故形态调查,主要分为侧翻与侧滑两种形态,分别对应不同的设计指标要求.为简化模型计算均假设车辆在弯道匀速行驶,此时v˙=0.
(1)侧翻临界最小半径.
当车辆处于侧翻临界状态时其内侧车轮的垂直载荷Fzfl=0或者Fzrl=0,代入式(3)求解得此时要保证不发生侧翻失稳,其最小半径须满足条件

(2)侧滑临界最小半径.
当车辆处于侧滑临界状态时其前后轴任一所受横向力等于横向附着力,即

式中:Fhf、Fhr分别为前后轴所受横向力(N);φ为横向附着系数.
前后轴横向力计算公式为

将式(6)和式(3)代入式(5),求解得到此时要保证不发生侧滑失稳事故,其最小半径须满足

1.3 弯道路段安全模型分析

根据式(4)和式(7),求解当Rfmin=Rhmin时有

因Rhmin与φ负相关,Rfmin与B/2hg负相关,故有

而φ值与路面类型相关,一般有φ≥0.15,而规范中综合附着系数与行驶舒适性,也设置有弯道横向力系数在0.13~0.17之间,即按照典型车型计算有B/2hg>φ,即在一般情况下车辆在弯道行驶时更易发生侧滑失稳,是主要考虑的事故类型.
若进一步考虑到实际车辆有制动转弯情形,此时应以左后轮Fzrl=0计算侧翻临界最小半径,并以后轴所受横向力等于横向附着力计算侧滑临界最小半径,此时最小半径要求较为复杂,与车辆参数hg及瞬时的转弯速度、制动加速度等有关,处于动态变化中.为方便模型分析计算,车辆一般在弯道采取温和连续制动,可将轮胎动荷载视为连续静荷载,在实际应用中采用预测弯道运行车速的最大值Vmax代入式(10)以对最小半径值进行校核.
2 弯道路段安全模型影响因素分析
根据式(7),弯道最小半径值与车速、横向附着系数及超高等有关,分析各因素对最小半径值的影响.以山区二级公路为例,基于山区公路特征,设计车速取20~80 km/h,超高4%~10%,同时考虑到山区公路存在泥泞、冰雪等不利环境,横向附着系数φ取0.05~0.20,计算结果如表1所示.
从表1得:最小半径计算值与超高及横向附着系数呈反比,与车速呈正比,但与车型因素无关.而横向附着系数φ值对最小半径计算值影响较大,对于山区公路可能存在的冰雪路面、泥泞路面φ<0.15时,最小半径计算值显著大于规范值,此时须采取必要的安全措施[7].而我国设计规范中也规定设计速度越高,横向力系数越小,实际也是对高速情形给予更高的安全和舒适保障.

表1 各因素对最小半径值影响Table 1 The influence of various factors on the minimum radius
3 弯道路段安全模型仿真分析
本文采用Carsim仿真软件对弯道路段安全模型进行仿真论证,Carsim软件同样是针对车辆动力学的模拟仿真软件.仿真中分别建立道路模型、车辆模型、驾驶员模型,通过仿真得到不同条件下的车辆侧滑临界车速,进而建立侧滑临界车速与对应道路参数的数学关系,再将设计车速代入数学关系式,间接得到各设计车速下的仿真最小半径值.
3.1 模型建立
模拟双向两车道山区二级公路情形,设计R=15~500 m间10种圆曲线半径,分别对应超高值从0~10%变化.道路模型按照山区公路设计规范要求包含直线、缓和曲线和圆曲线,缓和曲线选用回旋线.仿真车型采用Carsim内置车型.驾驶员模型设置选取normal,Driving on road course模式,设置初始速度并以此为目标车速进行控制,驾驶员预瞄前方道路线形的时间和延迟时间分别设为1.5 s和0.15 s,其余参数采用默认值.
以相互平等的陌生人为交往主体的现代社会,儒家有限的差等性责任不再是一个适切的道德要求,一方面要突破责任的有限性,将责任的辐射范围扩大至所有熟悉或陌生的交往对象;另一方面要摒除差等性,祛除因伦理身份或政治身份而来的特权观念,同等尊重每一个交往对象,用平等性的责任取代差等性的要求,唯其如此,儒家责任观才能走进现代生活。
3.2 仿真分析
研究中采取侧向加速度和轨迹偏移值双指标对侧滑状态进行定义:一是当车辆偏离正常轨迹,即车辆轨迹偏移值超过0.3 m;二是当车辆侧向加速度达到0.3 g[8],满足其一则认为车辆发生侧滑,此时车辆的速度即为仿真侧滑临界车速.因每次仿真试验中道路模型、车辆模型、驾驶模型固定,仿真具有可重复性,每种情形只需仿真1次.
3.2.1 不同半径影响分析
采用Carsim内置的C-Class车型,道路模型设置为:超高6%,半径值采用设计车速20~80 km/h时的规范最小半径,附着系数采取规范横向力系数,仿真不同半径下侧滑车速并与模型计算侧滑车速进行对比,如图2所示,设计车速、仿真侧滑车速、模型计算侧滑车速三者值较为接近,且均与弯道半径值呈正比.

图2 不同半径下侧滑车速对比Fig.2 Comparison of slide speed under different radiuses
3.2.2 不同超高影响分析
采用Carsim内置C-Class车型,道路模型采用80 km/h设计车速下8%超高对应的规范最小半径250 m,变化超高0~10%,仿真此时的侧滑车速值如图3所示,仿真侧滑车速与模型计算侧滑车速基本相同,且与超高呈正比关系.超高对于平衡车辆转弯所受离心力有正向作用.
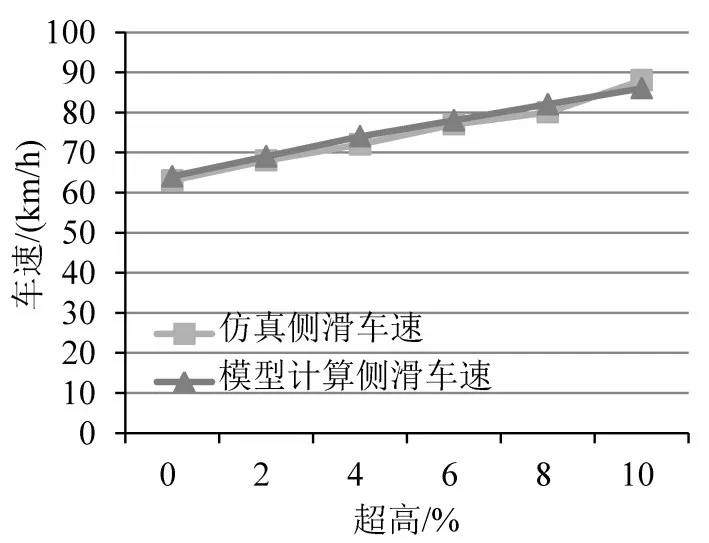
图3 不同超高下侧滑车速对比Fig.3 Slide speed under different superelevations
3.2.3 不同车型影响分析
以设计车速80 km/h下超高8%对应的最小半径250 m为例,采用Carsim软件中A~E型车及SUV、Truck共6种车型,仿真对比不同车型下的侧滑车速,如图4所示,车型因素对于侧滑车速值基本无影响,与前述安全模型理论分析结果一致.

图4 不同车型下侧滑车速对比Fig.4 Slide speed under different vehicle models
3.2.4 不同附着系数影响分析
同样采用半径250 m、超高8%的道路模型,变化附着系数值从0.05~0.20,仿真不同附着系数对侧滑车速的影响,如图5所示,仿真侧滑车速与附着系数值呈正比.理论模型计算及仿真分析都证明通过改善路面附着系数来提高车辆与路面的附着力,进而可以提升弯道行驶安全性.

图5 不同附着系数仿真值Fig.5 Slide speed under different friction coefficients
3.3 仿真最小半径分析
通过对各种道路模型下的仿真结果,得到不同弯道半径、超高情形的仿真侧滑车速,进而建立弯道参数与侧滑车速的相关关系,如表2所示.

表2 不同道路模型下仿真侧滑车速Table 2 Slide speed under different road models(km/h)
以超高为0情形为例,将10组弯道半径与对应仿真侧滑车速数据进行拟合,对比指数类型、线性类型、对数类型、多项式类型、冥函数类型等,采用冥函数形式拟合效果较好,如图6所示.

图6 侧滑车速与弯道半径拟合关系(0超高)Fig.6 Relationship between the speed of sideslip and the radius of the curve(superelevation=0)
同理求得其他超高情况下的拟合关系,将设计车速代入拟合公式,即可间接求得各设计车速对应的仿真最小半径值,如表3所示.
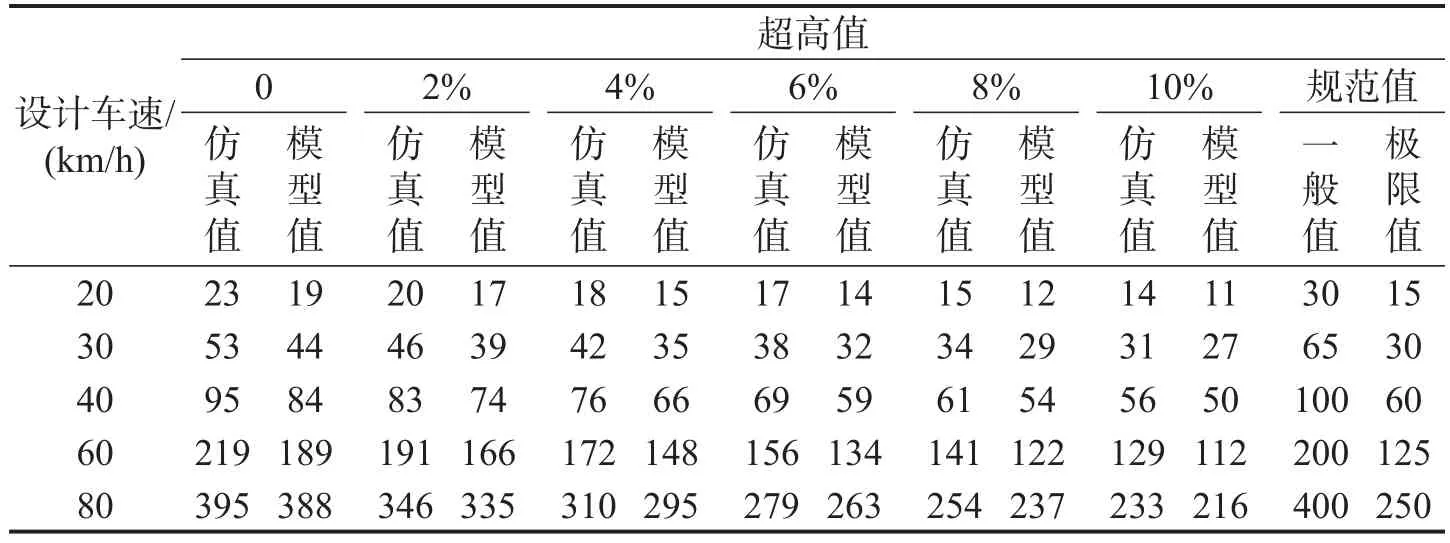
表3 仿真最小半径值与模型计算最小半径值对比Table 3 Minimum radius under simulation and model calculation(m)
对比数据可得:仿真侧滑最小半径值略大于模型计算侧滑最小半径值.分析其原因在于理论安全模型中仅从行驶动力学方面考虑了侧滑的临界状态,但仿真在保证不发生滑移的情况下对于侧向加速度等也进行了限定,综合了车辆转弯性能及驾驶员主观因素等,这实际在保障安全的前提下加入了舒适度等考虑,进一步提升了安全度水平.综合考虑安全模型与仿真试验结果,则可以考虑将模型计算最小半径值为极限最小半径值,而将仿真最小半径值作为一般最小半径值.
同理,进一步考虑驾驶员实际驾驶行为影响时,在初定弯道半径后,还应将预测弯道运行车速最大值代入式(10)对半径值进行校核,特别对于由长直线段进入弯道时,还应以期望车速作为进入弯道的初始速度代入计算,以保障车辆在山区公路弯道路段实际行驶安全.
4 结论
本文对车辆弯道行驶过程中的动力学进行分析,基于行驶稳定性推导出了侧翻与侧滑情况下弯道最小半径与车速、超高值等因素的关系,建立了弯道路段安全模型.模型证明:
(1)车辆侧翻临界最小半径与车型、车速呈正比,与弯道超高呈反比;车辆侧滑临界最小半径与车速呈正比,与横向附着系数及弯道超高呈反比.
(2)一般情况下,相较于侧翻车辆更易发生侧滑.
而后利用Carsim仿真软件模拟了车辆弯道行驶中侧滑工况,记录对应的侧滑车速、圆曲线半径和超高值,并讨论了不同超高、不同半径、不同车型下的侧滑临界车速变化规律.通过仿真论证了安全模型的正确性.基于模型计算和仿真试验结果,并与现行规范进行对比,本文得出以下结论:
(1)现行规范中设计速度越高,规定的最小半径值越保守.
(2)在综合考虑车辆弯道行驶稳定性及舒适性情况下,可将安全模型计算最小半径值作为极限最小半径值,而将仿真最小半径值作为一般最小半径值.
(3)弯道线形设计中还应考虑横向附着系数φ值的影响,当φ<0.15时应对最小半径设计参数进行校核.
(4)在实际应用中还应将预测弯道运行车速最大值代入安全模型计算式以对最小半径值进行校核.