改进层次分析法在侦察设备规划中的应用
2018-10-29姜天娇范秀英黄新宇
姜天娇,范秀英,黄新宇
(空军航空大学,吉林 长春 130022)
0 引言
有人侦察机成像侦察凭借其侦察时机动灵活,飞行员能够根据实时情况执行各种复杂的成像任务等特点,使其目前仍是主要的侦察成像平台[1-2]。而成像侦察任务主要依靠搭载的各类成像侦察设备来完成,所以侦察设备任务规划就显得十分重要。通过对实际侦察任务的需求进行分析,并结合各种侦察设备自身的性能,建立相应的模型,对侦察设备进行最佳选择,保证侦察任务的完成效果最优化[3]。针对传统侦察设备任务规划主要依靠专业人员的经验,缺乏客观性、合理性和准确性的问题,采用适当的分析方法和建模技术解决该问题一直以来都是侦察设备任务规划研究的重点。通过对侦察设备进行合理的任务规划,可以提高侦察效率,减少侦察风险,同时获取高质量的侦察图像,为作战提供更好的情报保障。
1 层次分析法
层次分析法[4](analytic hierarchy process, AHP)是将影响决策的相关因素分解为不同的层次,并在此结构上做出合理的定性或定量决策。层次分析法是具有多个层次的混合结构分析方法,其优点在于能够系统性地解决决策问题。每一层的指标因素都会对最终的结果产生影响,实质上是一种权重累积方法。而侦察设备任务规划受到的影响因素通常不是单一的,所以采用层次分析法对其进行研究具有一定的合理性。通过对不同类别、性质的影响因素划分层级,设定权重,同时在侦察设备任务规划中获得定量数据,可以弥补层次分析法在衡量具体参数大小所起作用的不足,结合各因素的权重以及实际数据可以得到一个客观的评价指标来进行决策。
侦察设备的优化选择对于侦察任务的完成情况具有重要作用,本文基于层次分析法对侦察设备任务规划的应用展开了分析研究,对影响侦察任务的相关因素确定了权重并建立了模型[5]。通过计算结果证明了该方法对于侦察设备任务规划具有重要作用,具体步骤如下:
(1) 建立问题递阶层次结构
分析待解决问题包含的相关内容,即影响问题解决的参考因素。根据它们互相之间的关系,确定其所在递阶结构中的层次以及重要程度。
(2) 确立比较判断矩阵
将上层指标元素作为下层指标元素的判断标准,然后依照该标准对同一层次各元素的重要性进行比较,将其按照1~9比例标度进行定量表示,并构建判断矩阵。
(3) 计算判断矩阵中各元素的相对权重
本文采用“和法”来计算该矩阵的最大特征值以及特征向量。实现步骤如下:
1) 将判断矩阵中的元素按列采取归一化;
2) 将判断矩阵中的元素按行相加;
3) 将上步求得的行和向量归一化,得到权向量w,公式如下:

(1)
式中:aij为判断矩阵中的元素;n为判断矩阵的阶数。
由于各层次指标在进行比较打分的过程中,可能会由于某些原因而造成打分结果出现矛盾的情况。当这种矛盾的情况比较严重时,经过计算得到的相对权重矩阵是不可靠的,因此不能用于其后的问题研究,要通过一致性验证的方法来筛选出可靠权重。
1) 计算一致性指标:
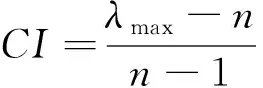
(2)
式中:λmax为判断矩阵的最大特征值;n为判断矩阵的阶数。通常矩阵的阶数越高,所要求作出的判断越多,越难达到一致[4]。
2) 从表1中查找出相应的平均随机一致性指标RI[6]。

表1 平均随机一致性指标
3) 计算一致性比例。

(3)
当CR<0.1时,可认为判断矩阵的一致性可以接受;当CR≥0.1时,要对判断矩阵进行适当调整;对于低于三阶的矩阵,CR=0。
4) 计算各层元素的组合权重
综合权重的计算要自上而下,对单个标准下的权重进行组合,并逐层进行总的一致性检验。
2 评估指标体系分析
选择指标时,首先必须明确完成侦察任务时所关注的重点或任务目标,建立判定侦察任务完成情况的标准以及影响各标准的关于设备本身的性能参数,设备本身的性能参数通常对侦察任务规划具有相当重要的作用,要在限度之内选择最优的侦察设备完成侦察任务[6]。将侦察任务完成情况作为一级目标指标,考虑通过3个准则指标作为第2层级指标来衡量任务完成情况,即侦察效率、图像质量和安全性。
其次,将所建立指标层次结构中的三级指标设定为使用特性指标,侦察效率是任务完成度的重要参考量,它可用4个使用特性指标描述:传输时间、调焦时间、时间间隔、收容宽度。
图像质量对侦察任务完成情况起决定性作用,且影响图像质量的使用特性指标较多,大致可概括为5个:地面分辨率、曝光量、像移、影像变形、调焦。
飞行的安全性是每次侦察任务完成的前提和根本,安全性影响因素指标包括:飞行时间、侦察高度、挂载武器、倾斜角。
最后根据第3层各使用特性指标确定与其相关的参数指标,作为递阶层次结构中的第4层指标,完成整个指标体系的构建。
3 构建侦察设备选择评估结构
根据上节内容的分析,可以建立侦察设备选择评估递阶层次结构,如图1所示。
很多侦察任务对于侦察效率方面有着较高要求,效率高低则成为优先考虑的一项指标;而在侦察效率要求不高的情况下,图像质量则变得尤为重要;对目标进行侦察的过程是否安全也是完成侦察任务的根本前提。判断矩阵如表2所示。
求得该判断矩阵λmax=3.064 9,一致性指标CI=0.032 5;通过查表得三阶平均随机一致性指标RI=0.58,计算可得一致性比例CR= 0.055 9<0.1,故其一致性满足。
在侦察效率方面,图像传输时间主要针对CCD等可进行实时传输的相机,而胶片型相机必须将胶卷带回地面后处理成像,这对任务完成的时效性影响较大;调焦时间是指拍照前针对一定侦察高度和环境条件进行调焦所需的准备时间;时间间隔即侦照设备连续2次曝光所需的间隔时间,会直接影响总的侦照时间[7];收容宽度是由相机横向视场角和侦察高度所确定的横向成像宽度,通常采用并列成像侦察、摇摆或步进成像方式来增大横向收容宽度,从而提高侦察效率及减少飞行时间提高安全性[8]。判断矩阵如表3所示。通过计算求得判断矩阵B1-C的CR=0.049<0.1,满足一致性。图像传输时间由任务区全部图像大小和图像传输速率决定。判断矩阵如表4所示。
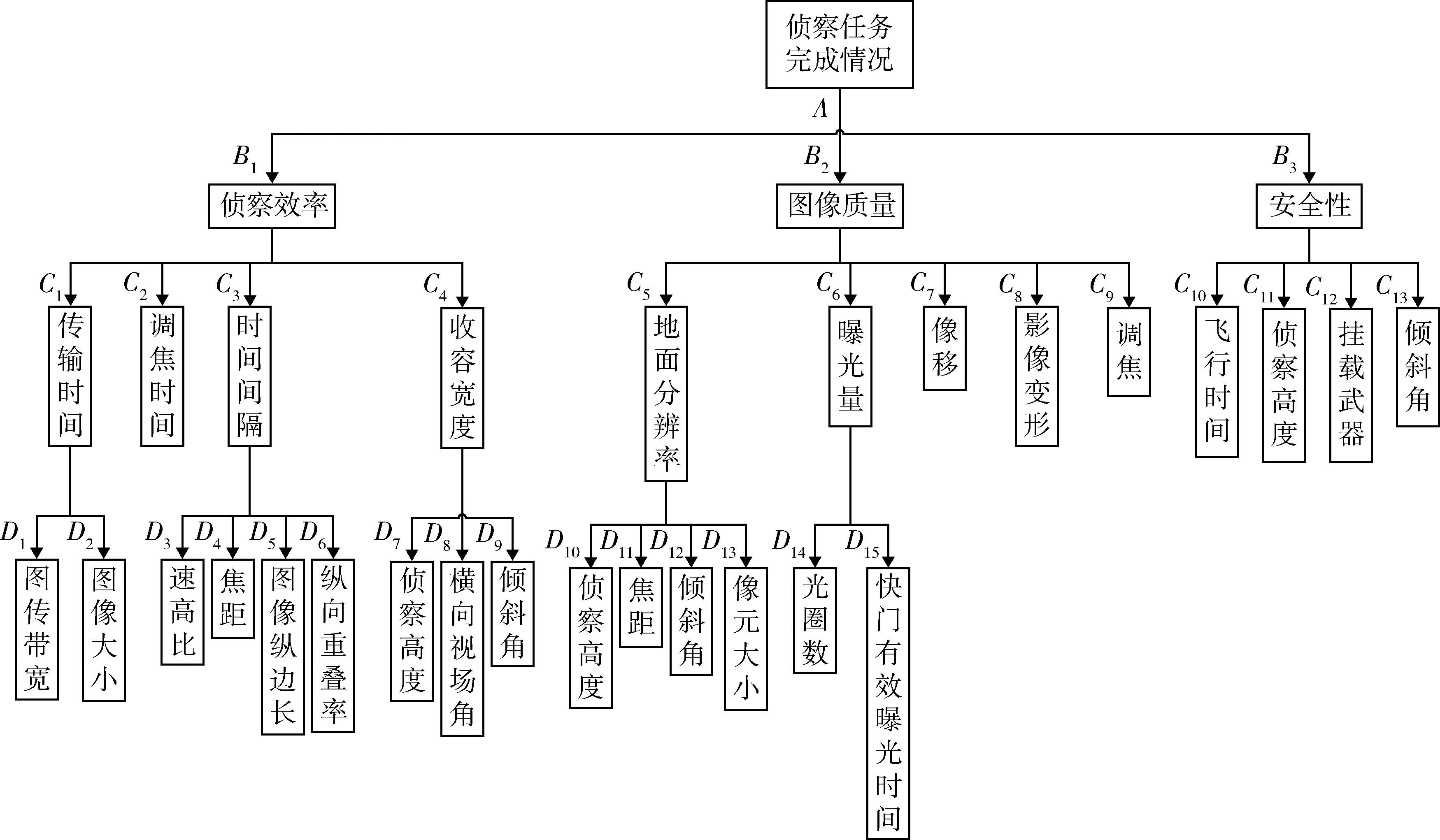
图1 侦察设备选择评估指标模型Fig.1 Evaluation index model of reconnaissance equipment selection

AB1B2B3WB111/530.193 2B25170.723 5B31/31/710.083 3
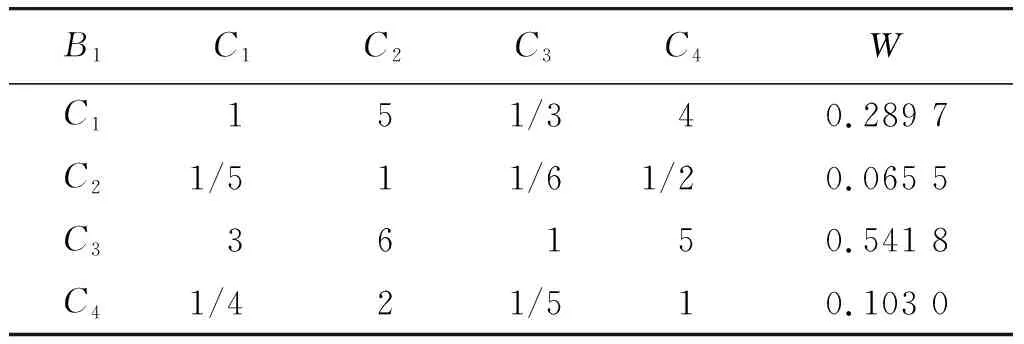
表3 判断矩阵B1-C
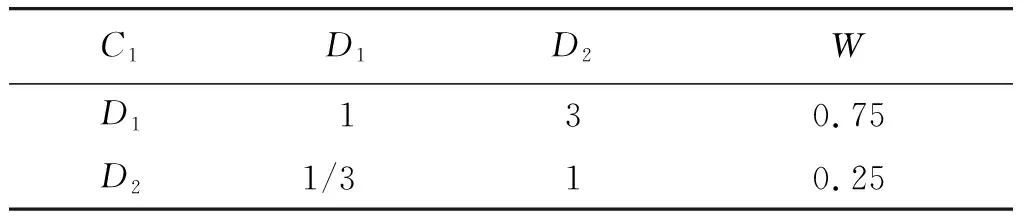
表4 判断矩阵C1-D
对于一阶二阶判断矩阵的CR=0,总是一致的,故无需检验其一致性。
速高比为飞行地速与侦察高度的比值;相机物镜焦距决定了像的大小,相同成像距离焦距越大,像越大;图像纵边长度是图像沿飞行方向的长度;纵向重叠率表示图像纵边重叠的百分率[9]。判断矩阵如表5所示。

表5 判断矩阵C3-D
计算判断矩阵C3-D的CR=0.064 9<0.1,故其一致性满足。
收容宽度由相机的横向视场角和成像距离决定。成像距离由侦察高度与光轴的倾斜角决定。横向视场角一定时,成像距离越远,收容宽度越大;成像距离一定时,横向视场角越大,收容宽度越大[10]。判断矩阵如表6所示。
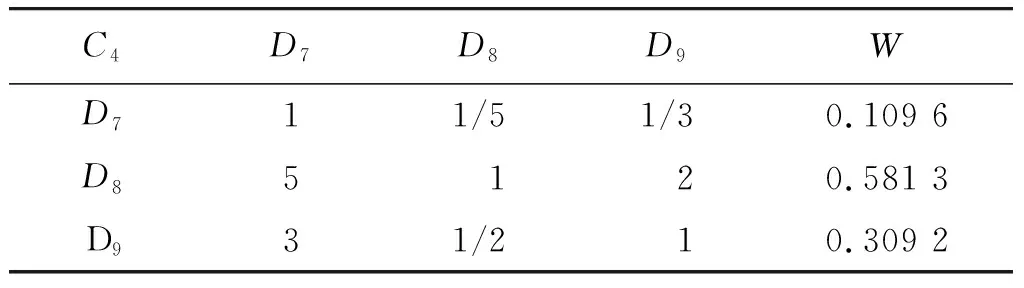
表6 判断矩阵C4-D
计算判断矩阵C4-D的CR= 0.003 3<0.1,故其一致性满足。
影响侦照图像质量的因素中,分辨率直接决定对目标的分辨能力,影响图像判读结果;使底片获得最合适的曝光量也是影响图像质量的重要环节之一,曝光过量或不足都会影响对目标的分辨能力[11];影像的变形主要考虑比例尺变形,变形程度大小对目标的分辨和测量有一定影响;像移是由曝光过程中侦照目标的影像与感光介质间的相对运动引起的像点移动,包括因前向飞行引起的前向像移,以及因飞行姿态改变而产生的随机像移,可通过相机的自动像移补偿系统和稳定平台进行补偿,故相机是否装有像移补偿系统同样会影响像质;相机能否自动调焦对图像清晰度有影响[12]。判断矩阵如表7所示。

表7 判断矩阵B2-C
通过计算,可得判断矩阵B2-C的CR=0.085 6<0.1,故其一致性满足。
地面分辨率主要受侦察高度、焦距和CCD像元大小的影响;执行航空侦察任务时有时无法进行临空侦察或者需要倾斜影像,此时就需要有一定倾角进行侧方侦察,倾斜角越大,在演习和作战时安全性越高,但同时图像质量也会有所下降[13]。判断矩阵如表8所示。
计算得到判断矩阵C5-D的CR=0.065 8<0.1,故其一致性满足。
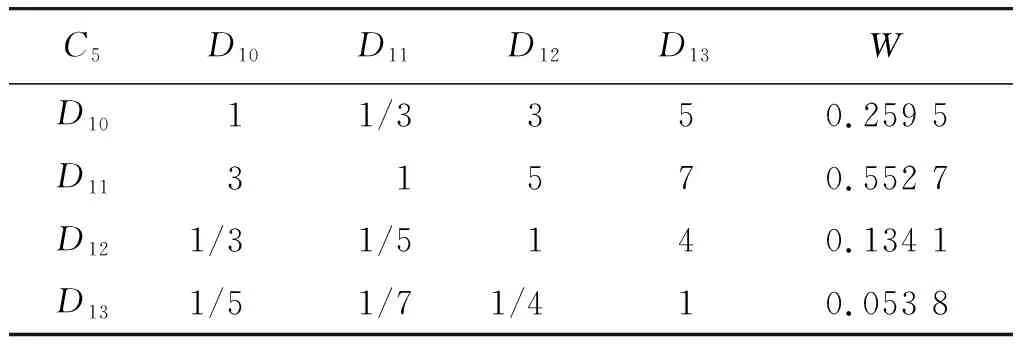
表8 判断矩阵C5-D
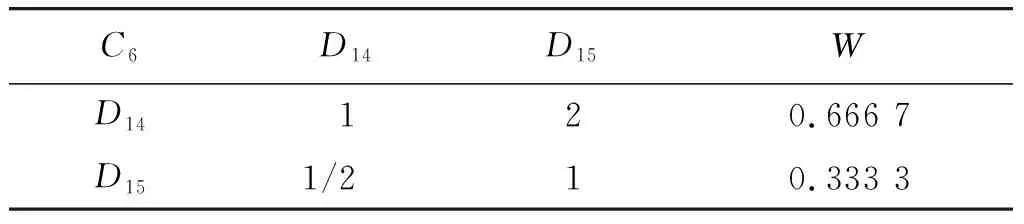
表9 判断矩阵C6-D
对于一阶二阶判断矩阵的CR=0,总是一致的,故无需检验其一致性。
飞行时间对飞行安全性影响较大,飞行时间越短,安全性越高;安全性同时受侦察高度、倾斜角的综合影响;如果相机总质量较小且对飞机重心影响满足要求时,可以挂载武器进行自卫从而增强飞行安全性[15]。判断矩阵如表10所示。
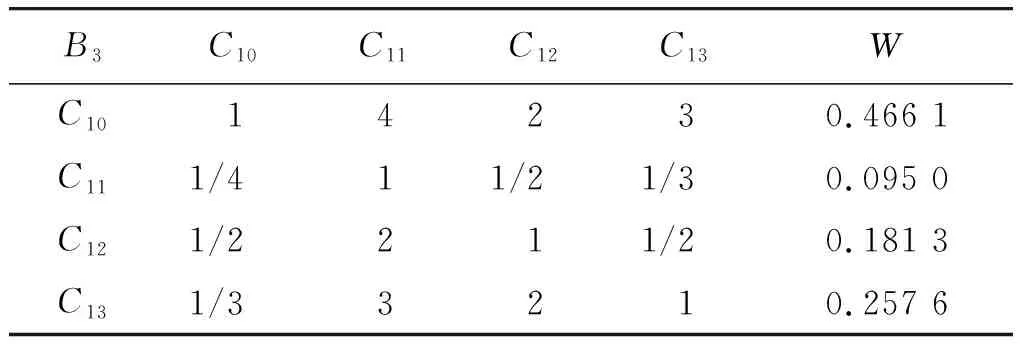
表10 判断矩阵B3-C
计算得到判断矩阵B3-C的CR= 0.046 0<0.1,故其一致性满足。
4 实际算例分析
4.1 仿真数据
设定侦察任务执行时天气良好,光照条件适度,对某目标进行侦察。通过选取型号1~3侦察相机,采用单台侦察方式进行侦察。获得其参数及实际侦察数据如表11所示。
4.2 评价结果
对表11,12中的数据进行归一化处理,将其用B表示。影响侦察任务的因素的权重矩阵用A表示。最后的评价值设为R,R越大代表性能越稳定,具体算法过程如下;
(1)RCj=AiBi(1≤i≤15,1≤j≤6),i为D层指标个数,j为包含下级指标的C层指标个数。
(2) 对通过计算得到的RCj进行归一化。
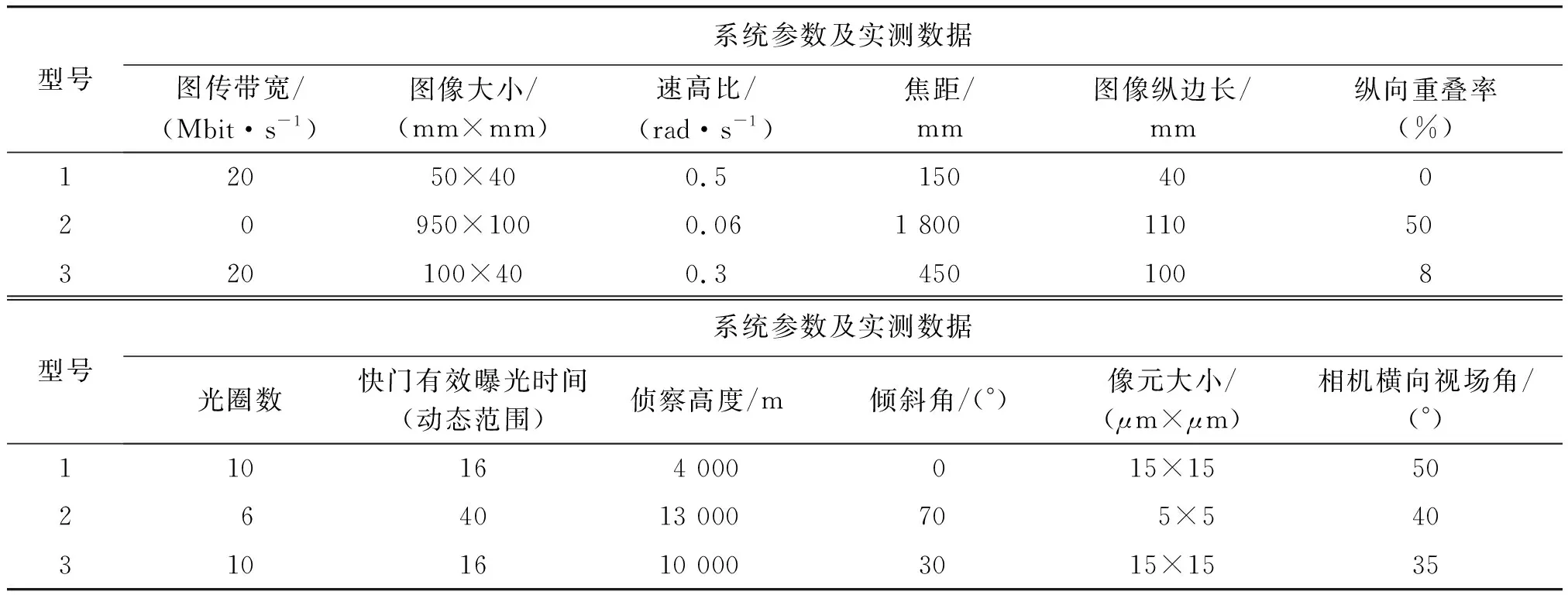
表11 D层实测数据

表12 C层(无下级指标)的实测数据对应权重
(3) 将无下级指标的C层实测数据按照表12进行设定,表示为RCk(7≤j≤13),使其范围在0~1之间,以满足归一化的一致性。
根据上述算法流程,计算结果如表13所示。

表13 3种相机的R值
从表13中可以看出型号2的R值最大,说明选择该型相机进行此侦察任务能达到最佳效果。并且3种型号的相机的R值处于合理的数值区间,说明该算法具有有效性。
5 结束语
本文利用层次分析法对侦察设备任务规划进行了研究,首先将层次分析法的权重指标与侦察设备任务规划的实际参数进行了综合考虑,建立了模型,然后对相机的具体参数做了详细的分析。最后以实际侦察任务为例进行了仿真实验,实验结果表明本文提出的方法对侦察设备任务规划能实现效能最大化,在较低风险情况下能保证侦察任务更好地完成,并且实验结果与实际侦察任务设备使用频率具有一致性。