地埋式垃圾压缩站遥控系统设计
2018-10-27河南工程学院土木工程学院河南郑州市451191
(河南工程学院 土木工程学院,河南郑州市,451191) 徐 平
(河南工程学院 机械工程学院,河南郑州市,451191) 闫修鹏 李 英
随着城市垃圾数量的不断增加,垃圾处理日益受到关注[1]。常见的处理方式有填埋堆肥、焚烧及热解气化等,无论是哪一种处理方式,其收集和运输是必要的环节[2]。目前主要的城市生活垃圾处理工艺有填埋、堆肥、焚烧、热解气化及综合利用技术五种[3],据2015年的统计数据显示填埋处理量占63.9%;焚烧处理量占33.9%;其他处理方式占2.2%[4]。无论是哪一种处理方式,其收集和运输都是必要的环节,但是传统的收集过程没有对垃圾进行有效的压缩,使得垃圾体积较大,增加运输量的同时还增加了垃圾存储或者填埋场地,同时还大大降低垃圾的腐化。
为此垃圾在收集的同时进行压缩然后再运输已经成为一种有效减少垃圾体积、运输量、场地和腐化性的方法,因此设计开发用于固体垃圾的收集压缩和运输的设备成为垃圾处理领域的研究热点[5,6]。目前垃圾压缩站有两种,一种是地埋式垃圾压缩站[7],一种是移动式垃圾压缩站[8,9],由于地埋式垃圾压缩站垃圾压缩处理能力要强于移动式垃圾压缩站,因此在一些垃圾量较大的地方有着广泛的应用。
对于埋地式垃圾压缩站来说,目前其操作时基本是面板操作,操作时离压缩站距离较近,由于垃圾种类繁多,且没有经过处理,使得操作环境比较恶劣,特别是在夏天,甚至无法接近操作面板。为此,针对某款地埋式垃圾压缩站,设计了远程遥控系统。
1 垃圾压缩站基本结构及工作原理
地埋式垃圾压缩站的主要结构如图1所示,主要包括机架、液压油缸、压头、箱体中门和垃圾箱,其中,液压油缸包括主副液压缸,辅助液压缸连接在顶部横梁上,主液压缸顶部与压头相连,压头对垃圾箱内部的垃圾进行压缩处理。
压缩时,先由辅助液压缸带动压头向下伸展,达到最大行程后保持不动,再由主缸驱动对垃圾进行压缩。完成压缩后,推铲机构将垃圾块推至垃圾储存箱内,再进行第二块压缩,待全部完成后,压头上的挂钩与箱体上的挂钩相连,在主缸的驱动下将其抬升至指定位置,最后由推铲油缸驱动推铲将垃圾块推至转运车上。

图1 垃圾站总体图
根据压缩站的总体布局,系统中共有12个液压缸,其中主、副液压缸是1路管路,垃圾推入缸单独1路液压管路,前门升缸、挂箱缸、安全挂钩和中门升缸都是左右各2个,左右两个缸是同一管路,因此实际的控制阀只需要6个即可,每个控制阀分别有前进和后退两个操作,为此需要12个电磁阀,如图2所示。
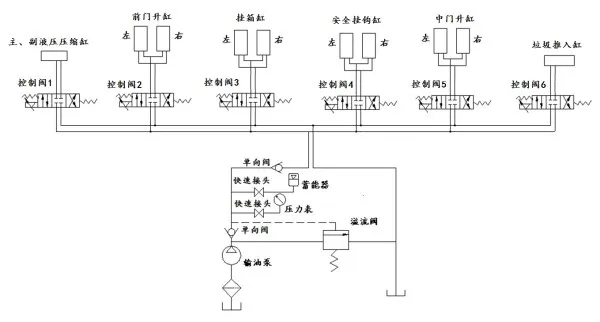
图2 液压系统总体布局图
2 控制系统设计
如前所述,此次设计是在原控制系统的基础上设计一远程遥控系统,为此本设计的主要内容为利用单片机作为控制芯片,通过程序控制继电器的状态,继而控制液压缸的工作状态以达到控制垃圾压缩站的目的,其控制原理图如图3所示。控制系统主要由信号发射、信号接收、单片机及继电器组成。工作时,信号发射装置传递给信号接收装置一个信号,单片机开始工作,单片机通过内部程序控制继电器继而实现对液压缸的控制,实现对垃圾的压缩处理,12路控制的原理完全一致。
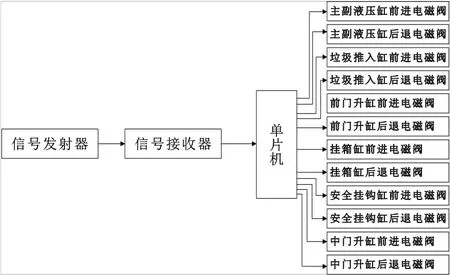
图3 控制系统结构框图
为此,控制系统主要是远程遥控系统,主要包括单片机最小系统、无线发射模块、无线接收模块和继电器控制。
2.1 单片机最小系统
单片机最小系统指的是其能正常工作所必须的外围元件,大体可分为时钟电路和复位电路。此次设计选用的是AT89S51单片机,其自带4K的FLASH程序存储器,256B的RAM,32个I/O口,五个中断源、两个16位定时器,完全满足外部输入和控制输出通道数的要求;复位电路采用上电复位方式;时钟电路晶振11.0592MHz,其结构原理图如图4。

图4 单片机最小系统
2.2 遥控部分设计
遥控部分的基本原理是利用三极管将编码器的信号进行放大,调制后,将此脉冲波经由红外发射管转变为光信号发射出去,波长为940nm。而接收管将接收到光信号后转换为电信号,经过放大-增益-滤波-解调变-整形还原后,还原出遥控器给出的原始编码,此时接收头信号,并输入到后续代码对进行识别。
红外遥控部分选用PT2262/2272芯片为主构成的无线遥控器,PT2262/2272互为配套,一对带地址和数据编码功能的遥控发射芯片和接收芯片。
PT2262是载波振荡器、编码器和发射单元三者都集成于一身的芯片,负责控制信号的发射。需要说明的是,为了节省发射控制器面板,只布置了4个按键,通过不同组合来实现12个动作的操作,其操作属于点动式遥控,每按下一个按键就有对应的电磁波信号发射出去,无线发射装置电路如图5所示。

图5 无线遥控发射电路
PT2272是接收芯片,能够实现遥控信号的还原,接收模块的电路如图6。
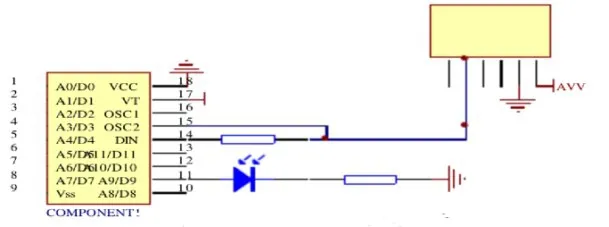
图6 无线遥控接收电路
2.3 继电器控制
垃圾压缩站选用继电器对液压缸的运动进行控制,继电器闭合时对应的液压阀门开启,继电器断开时对应的液压阀关闭。因此控制相对简单,只需要利用I/O口控制继电器的控制端即可,其控制系统的原理如图7所示,此处利用二极管来替代外部继电器控制端。
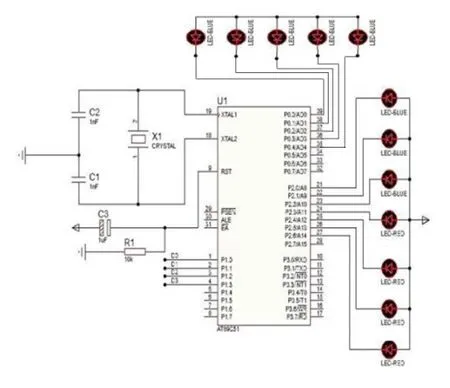
图7 继电器控制系统电路
3 软件程序设计
控制程序相对简单,只需要检测按键是否按下,然后按照对应的键号处理即可,流程图见图8。
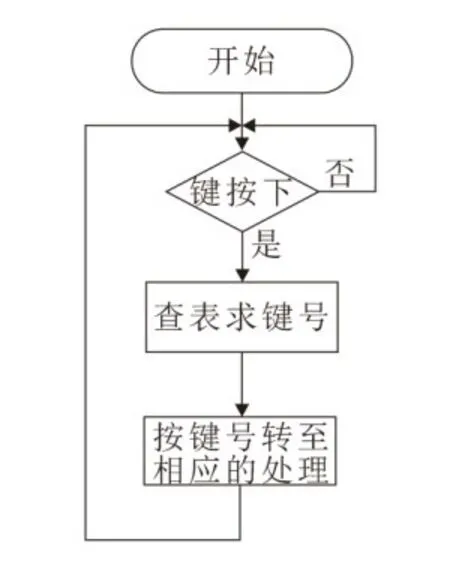
图8 系统程序框图
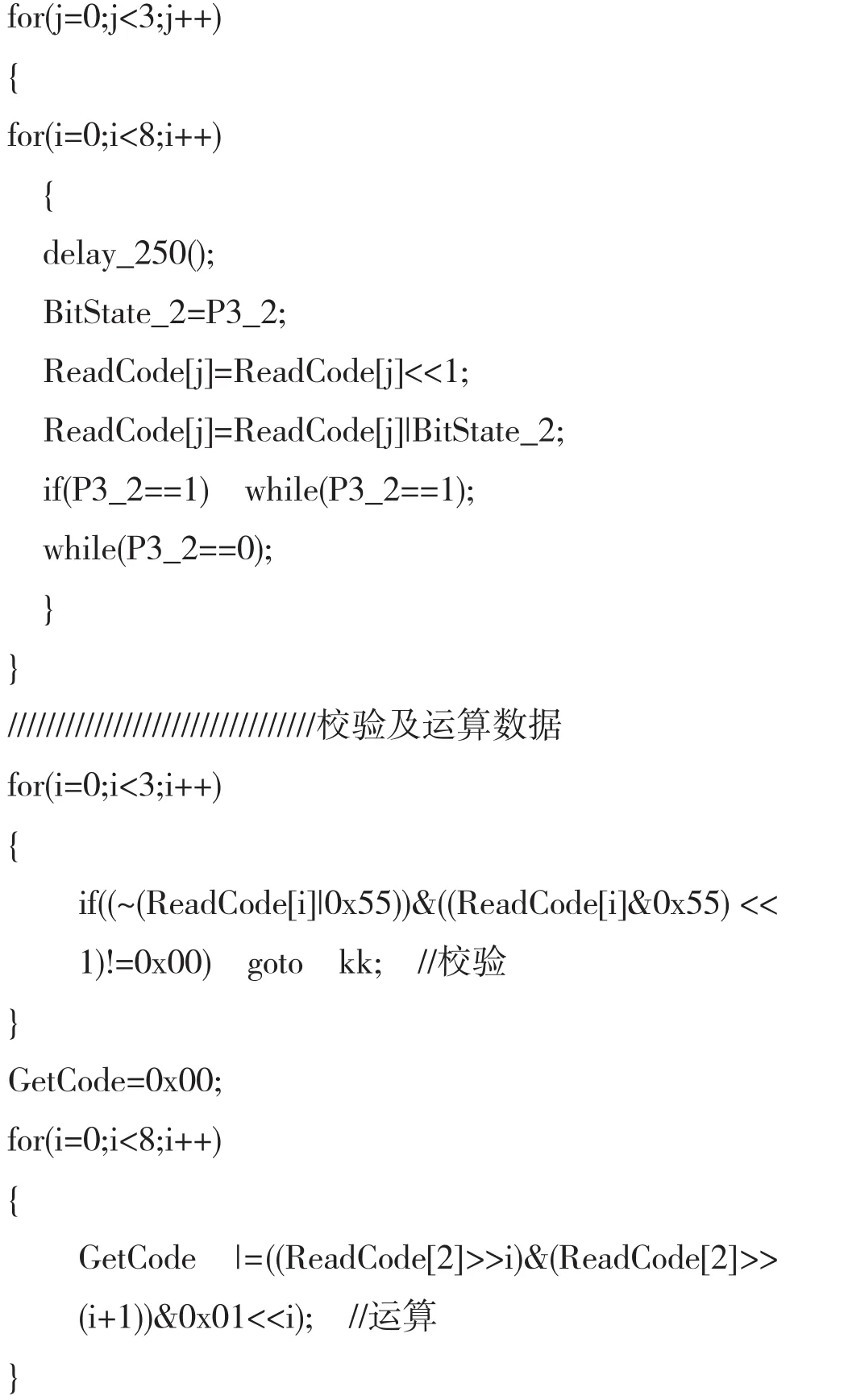
其中查表求键号相对复杂,其程序如下:
4 调试结果
如图9所示为埋地式垃圾压缩站实物图,表1为垃圾压缩站测试结果,包括垃圾处理量,垃圾尺寸、压缩缸运行速度和推入缸运行速度都满足要求,并且,通过实际的操作可以实现垃圾压缩和垃圾箱上车等操作,达到了设计目的。

表1 压缩站测试结果

图9 垃圾压缩站实物图
5 结语
根据实际工程需要,完成了埋地式垃圾压缩站遥控系统的设计,该设计基于价格便宜的51单片机和遥控模块,能够实现工作过程的控制,达到了预期设计目的。
