任务驱动的面向对象战场环境仿真过程建模
2018-10-26朱杰,游雄,夏青
朱 杰,游 雄,夏 青
1. 信息工程大学地理空间信息学院,河南 郑州 450052; 2. 73021部队,浙江 杭州 315023
在基于信息系统的联合作战体系背景下,各信息系统都是围绕作战任务需求为军事人员提供辅助决策支持[1]。作战任务作为信息系统数据组织与交互的外在驱动,使空间应用逻辑过程符合战场认知规律。战场环境仿真是根据作战应用需求以数字模型方式构建战场环境,并且为军事人员提供虚拟战场环境,将指控系统与仿真系统相结合有利于提高指挥员精确指挥的能力,是军事测绘保障实现主动服务的重要途径[2]。
首先需要对作战任务具有一致的理解,才能确保各作战单元高效准确处理所需的数据。为了方便作战意图能够在指控系统与仿真系统之间快速准确地传递,美军提出一种作战管理语言BML(battle management language)对军事计划和命令等“自由文本信息”进行明确无歧义的表达,确保信息在军事人员、指控系统和仿真系统三者之间清晰无异地传输[3]。GeoBML是BML针对地理空间领域而进行的扩展,从地理空间信息角度将BML从原来聚焦于任务、敌情、我情和时间等四要素扩展为任务、敌情、我情、地形、气象和时间等六要素,最大限度地对指控信息中包含的地理环境数据做标记,进而形成理解战场环境的信息和知识[4-5]。
数据模型和形式化语法是BML研究的主要方向,国内外许多研究人员对此进行了一系列研究。文献[6—9]通过改进BNF形式化语法来定义BML满足计算机自动处理规则,提高结构化信息的处理效率;SISO2014分别从JC3IEDM定义数据模型、形式化结构语法和本体实现跨系统概念互操作3个方面建立标准化语言规范[10];文献[11—12]采用BML作为标准语言来规范任务的描述解决无人系统平台与外部系统之间的互操作问题;文献[13]在BML管理实体数据和文本信息交互的有效性基础上进一步通过知识共享促进信息操作来提高战斗管理敏捷性。GeoBML随着BML的发展,集中研究如何将任务信息中的地理信息形式化并叠加,使它们能够与正式的命令和报告相结合,确保系统能按照预期方式连贯地处理关键信息[14-15]。这些研究都是从语义层上实现仿真系统与指控系统之间的互联、互通和互操作,地形和天气是影响态势感知和指挥控制的基本战场环境因素,指控信息中的命令、请求、报告都与战场地理信息紧密关联,如何使指控系统与仿真系统在地理空间信息和知识上实现准确无歧义的描述是今后战场环境保障的重要研究方向。
目前战场环境仿真系统与指控系统之间互操作性还不完善,战场环境数据还没有被完全集成在作战指挥过程中,因此,需要构建一个符合作战指挥过程规律的战场环境仿真过程模型来有效解析指控系统关键信息需求,并在任务驱动下动态实时管理仿真系统各类数据。
1 面向作战任务的战场环境仿真过程概念模型
战场环境仿真过程是利用计算机构建一个逼真的、可以量算的及实施交互的虚拟战场环境的过程;任务驱动的战场环境仿真过程是根据作战任务,在任务信息中挖掘影响任务的环境要素,抽取其关键信息需求,在各个层级的作战规则库与军事行动库的支持下,建立战场环境模型的活动过程。任务过程具有层次结构性特征,按照任务执行层次对应的分解粒度,将具体任务分解为若干个子任务过程与元任务过程的组合[16-20],记为
式中,SubTask表示子任务过程;MetaTask表示元任务过程;Taski表示当分解粒度为∂时由子任务过程组合而成的某一具体任务过程;SubTaski表示当分解粒度为β时由子任务过程SubTask与元任务过程MetaTask组合而成的子任务过程序列,实际中,一个具体的任务过程由若干个相互关联的子任务与元任务组成过程序列表达。
从形式上,任务过程基本单元通常采用过程发生的时间、过程发生的地点、作用的对象、发生的行为和触发行为变化的事件这5个方面来描述,记为
MetaTaski=fprocess(P_ID,P_Time,P_Location,P_Object,P_Act,P_Event)
那么,面向对象的战场环境仿真过程是对战场环境对象发生变化的具体操作的记录,按照关系范式对描述触发环境对象行为发生变化的各类关系语义进行封装,表达对象及对象之间的相互关系,以及记录触发对象变化的过程。战场环境仿真过程概念模型可定义为由任务过程对象O_Task,仿真过程对象O_EvSim,两者语义驱动关系O_SemRelation,以及关系函数fmap构成,记作
fmapO_Task,O_EvSim,O_SemRelation=0
战场环境仿真过程对象O_EvSim,也可以从时间、空间、对象、活动和属性5个方面来描述其基于作战任务的变化过程,可描述为六元组
EvSim〈EvSim_ID,∑EvSim_Object(i),∑EvSim_Process(i),EvSim_Attr,EvSim_Time,EvSim_Spatial〉
式中,EvSim_ID表示仿真过程的唯一标识号,与作战任务过程标识相对应;∑EvSim_Object(i)表示仿真过程发生作用的数据对象集合,与任务过程解析的地理空间关键信息需求相对应;∑EvSim_Process(i)表示组成仿真过程的活动对象集合,与任务过程发生的行为相对应;EvSim_Spatial表示仿真过程发生的空间区域,与任务过程作用的空间信息相对应;EvSim_Time表示仿真过程发生的时态信息,与任务过程作用的时态信息相对应;EvSim_Attr表示仿真过程属性,包括过程的空间属性、时间属性和语义属性。
基于任务过程的面向对象战场环境仿真过程概念模型实质上是将空间(实体)对象、过程和语义规则封装在一起成为对象结构模型,从而完整地描述了三者之间的相互关系,能够实现战场环境仿真过程对象在空间、时间、事件、属性上的统一描述与表达。从语义描述结构上看,仿真过程与任务过程都是具有一定语法结构的句子,即“主语+谓语+宾语+状语+……”,这实际上明确了行为要素的语义结构可以简化为动词和名称组成Process(Verb,Noun),其中Verb表示构成过程的一系列行为相关联的动词,如描述任务类型的动词机动、突击、破袭、防守等;Noun表示被执行对象相关的名词,如描述空间位置、作战区域环境相关数据名词等。这样从语义结构上进一步明确了作战任务过程与仿真过程要素的相关构成,即执行任务过程的作战单元(Unit)、作战时间(Time)、作战地点(Location)、作战目的(Purpose)以及与作战任务相关的属性(Property),计算机可根据具体作战任务对上述要素进行合理组合生成规范化的行动描述,因此,按照语义描述可将元任务语义结构形式化描述为五元组结构
MetaTask_Sem={Task_Location,Task_Time,Task_Unit,Task_Purpose,Task_Property}
相应的,战场环境仿真过程模型的语义结构用五元组形式化描述为
EnvSim_Sem={Evs_Location,Evs_Time,Evs_Unit,Evs_Purpose,Evs_Property}
2 基于GeoBML的战场环境仿真过程逻辑模型
2.1 GeoBML的数据模型及形式化语法
GeoBML语法引用的是C2LG(command and control lexical grammar)形式化语法[21]。C2LG是一个结构化语法,其遵循Chomsky(1957)提出的一般性形式化语法,即四元组结构来表示过程信息,记为G=〈S,N,E,P〉其中,S表示开始符号;N表示有限的非终结符号(语法的词汇);E表示非终结符号的有限集用于描述语法允许生成的成分类型和句子等价的表达;P表示有限的生成规则以确定连接词与句子成分的等效表达式。相比Chomsky的语法定义,C2LG是一个与上下文无关的语法类别,因而P的生成规则采用BNF来描述,其扩展后规则如下
OB::=〈Verb〉〈Tasker〉〈Taskee〉[〈Affected〉|〈Action〉]〈Where〉〈Start-When〉[〈End-When〉]
〈Why〉〈Label〉{〈Mod〉}
式中,OB属于非终结符号有限集N;Verb非终结符,表示指定要分配的任务;Tasker非终结符,表示分配任务的发出方;Taskee非终结符表示接受任务方;Affected非终结符表示受任务过程影响的实体;Action非终结符表示另一个将被执行的任务过程;Where非终结符表示执行任务区域的空间构成;Start-When非终结符表示时间构成中的开始时间;End-When非终结符表示时间构成中的结束时间;Why非终结符表示执行该任务过程的目的;Label非终结符表示一个唯一标识符以标明该命令可在另一个表达式中引用;Mod非终结符表示该语法中的修饰成分用于描述特定任务所需要额外附加的信息。
〈Where〉是GeoBML表示地理空间信息的关键元素,对于任务过程分配的组成部分要求列出适用于要分配的任务的所有空间约束。只有这样,系统才能从地理空间视图正确地解释任务分配。GeoBML对空间位置非终结符〈Where〉作出扩展,由限定符和引用组成,并基于以下规则
Spatial::=〈Qualifier-Where〉〈Tasker〉[〈Taskee〉]〈Start-When〉[〈End-When〉]〈Label〉
式中,Qualifier-Where非终结符用来修饰和限定〈Where〉,如表示空间区域的特性,安全或者危险区域。由此,从语法结构上GeoBML呈树状结构,其基本语法树如图1所示。

图1 GeoBML基本语法树Fig.1 GeoBML basic syntax tree
2.2 基于GeoBML的逻辑关系语义表示
基于GeoBML的逻辑关系语义表示是GeoBML自动处理任务信息和关联地理信息在时空关系语义上的逻辑描述和表达,能够通过表达式将包含所有相关地理信息转换成XML表示形式,使仿真系统能够在接收任务信息后让相应的仿真单元按预定的顺序执行指定的活动。
战场环境仿真过程主要是任务驱动下建立相关的战场环境模型的过程,侧重于关注影响战场认知的环境要素及其相互关系。因而,基于GeoBML表示战场环境仿真过程时空逻辑关系语义包括空间对象的语义叠加及其叠加引用。一般性的空间对象语义叠加组成包括:Overlay Type〈Label,Map,U_Position,AOI〉,其中,Label表示唯一标识符,Map表示引用地图区域范围,U_Position表示环境对象实体名称和位置,AOI表示关心区域的空间特征属性。基于XML描述的一般性空间对象语义叠加如图2所示。
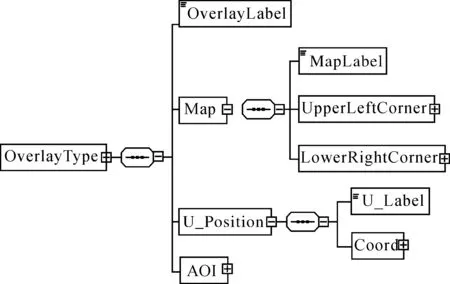
图2 基于XML的一般性空间对象语义叠加Fig.2 Semantic overlay of general spatial objects based on XML
对应于一个指定性作战任务,基于GeoBML表示战场环境仿真过程空间对象的叠加引用语义组成包括:〈E_Label,G_Label,Taskee,Affected_Unit,AOI,Control_Feature〉,其中E_Label表示叠加引用的空间对象唯一标识符;G_Label表示上一级叠加的空间对象唯一标识符;Taskee表示执行任务单位属性,包括名称、位置等;Affected_Unit表示受任务影响的环境实体属性,包括名称、位置等;AOI表示任务区域内的空间特征属性;Control_Feature表示叠加引用的空间对象特征属性。对于不同的任务过程,战场环境仿真过程在任务分配表达式中〈Where〉引用必须适合相应的任务类型,因而空间对象的叠加引用语义对应每一个任务类型都有一个特定的XML模型对其进行描述,如图3所示。

图3 特定任务类型基于XML的空间对象语义描述Fig.3 Spatial object semantics description for specific task types based on XML
叠加引用的空间对象特征,按照几何特征区分为点类型、线类型和面类型特征,每一种类型特征属性包括简单属性和复杂属性。简单属性表示其本身的属性标识,复杂属性包括所有子对象类型、坐标组成、所有者和用户的属性等,基于XML可描述如图4所示。
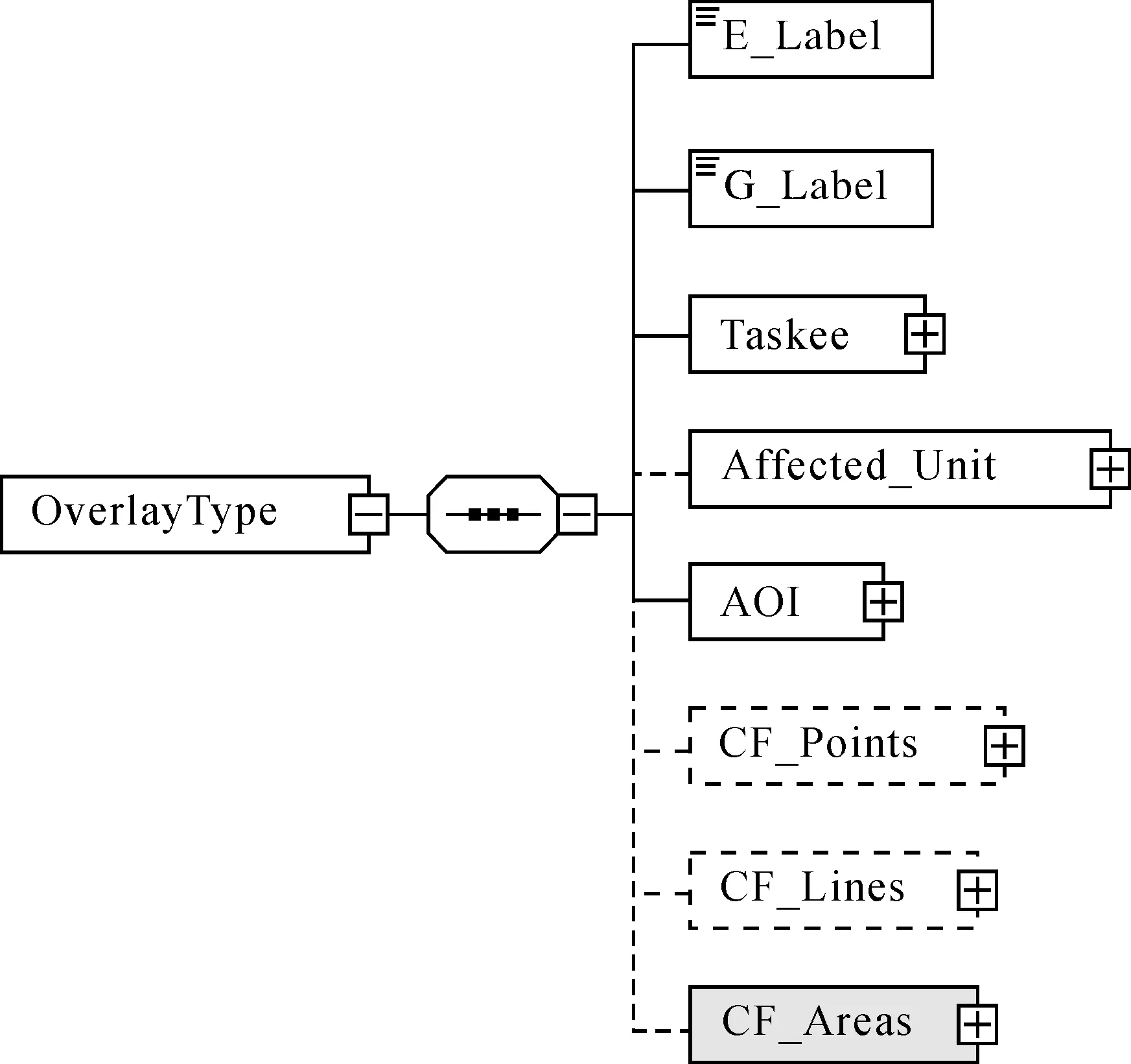
图4 叠加引用的空间对象特征基于XML的语义描述Fig.4 Semantic description of overlay referencing spatial object features based on XML
显然,基于任务的战场环境仿真过程逻辑关系语义描述能够表达作战任务、 仿真事件和环境对象各种状态之间的复杂时间和空间关系。通过上述基于XML属性描述,能够将基于GeoBML的逻辑关系描述转换成能够增强仿真过程与任务过程协同的时空关系表达能力。
2.3 基于GeoBML的战场环境仿真过程形式化描述
首先采用GeoBML语言作为战场环境仿真过程概念模型的形式化描述语言,然后将其映射为XML表示的数据模型,实现计算机的有效识别。在2.1节GeoBML数据模型和形式化语法的基础上,参考文献[7]中提出的基于改进BNF的BML描述作战命令和报告等指挥系统处理的作战任务,基于GeoBML对战场环境仿真过程可形式化描述如下
〈OB_EnvSim〉::=〈Verb_Sim〉〈Tasker_Sim〉〈Taskee_Sim〉[〈Affected_Sim〉|〈Action_Sim〉]
〈Where_Sim〉〈Start-When〉[〈End-When〉]〈Why〉〈Label〉{〈Mod〉}
式中,GeoBML对仿真过程在时空语义的表达主要是通过非终结符Verb在任务过程语义驱动下,非终结符Verb决定了非终结符Affected受影响的环境实体是否出现及其要素的组成;非终结符Where扩展基于位置的空间对象数据组织方式,如分为在某地At-Where和经过某地Route-Where两种方式描述实体位置,其描述方式为
〈Where〉::=〈At-Where〉|〈Route-Where〉
具体扩展如下
〈At-Where〉::=*at*〈Location〉
〈Route-Where〉::=(〈Source〉〈Destination〉
〈Path〉)|(〈Source〉〈Path〉)|(〈Destination〉
〈Path〉)|...|(*along*〈Path〉)
〈Source〉::=*from*〈Location〉
〈Destination〉::=*to*〈Location〉
式中,at、along、from、to为终结符,表示仿真过程实体空间关系语义;非终结符Location表示仿真过程中要表达的与任务信息相对应的实体位置信息;非终结符Path表示点状实体与线状实体对象构成的路径信息。
利用XML Schema技术对上述GeoBML形式化的描述转化为标准化数据格式和结构化描述[22],如图5所示。
3 作战任务驱动的战场环境仿真过程物理模型
3.1 基于过程域的战场环境仿真过程对象数据结构
以基于GeoBML的战场环境仿真过程概念模型为基础,针对仿真过程对象特征及逻辑关系,按照面向对象的方法对仿真过程对象数据进行组织。一方面建立时空数据对象结构,用于描述仿真过程的时空关系,另一方面建立环境要素对象类,用于描述仿真过程关联的地理环境要素及其相互关系。
定义1:过程域(process region)是基于作战任务的战场环境仿真过程中对战场环境信息及其时空关系的抽象表征。设E表征战场环境信息,S表征空间特性,T表征时间特性,则过程域PR={E,S,T}。
定义2:仿真过程域对象(simulation process region object)是基于面向对象的方法对仿真过程域抽象并对其要素进行功能特征封装,包括域对象的结构、属性和操作,形成可交互的仿真过程对象类。设PR为过程域表征,A为对应过程域属性,M为对象操作规则,则仿真过程域对象SPRO={PR,A,M}。
基于过程域的战场环境仿真过程对象数据结构包括仿真过程类型、过程属性、过程操作、战场环境要素关联及其时空关联特征等,其结构体可具体定义如下
Struct Process_SPRO{
∥过程特征
Long SimID;∥仿真对象ID,唯一标识符,主键
Struct SimType;∥仿真过程对象类型
Struct SimAttribute;∥仿真过程对象属性信息
Struct SimRule;∥仿真过程对象操作规则
∥环境要素关联
Struct EnvSim_Object;∥战场环境要素对象结构
Struct EnvSim_Object_Attribute;∥战场环境要素对象属性
∥时空特征关联
Sdo_Geometry SimRegion;∥仿真过程域几何信息
Struct SimPosition;∥仿真过程域位置信息
Data Sim_Begin;∥仿真过程起始有效时间
Data Sim_End;∥仿真过程终止有效时间
∥调用数据库表操作
void GetDateFromDateBaseIndex(char index);∥读取对应模型数据库索引并返回数据
void UpdateDateToDateBaseIndex(BLOB Data,char index);∥修改数据并返回索引
}

图5 战场环境仿真过程形式化描述框架Fig.5 Formal description framework of battlefield environment simulation process
根据Oracle Spatial空间数据模型存储机制来构建战场环境仿真过程模型数据库,每一个仿真过程域对象按照字段映射规则建立数据库中相应的过程对象表,如表1所示。
3.2 战场环境仿真过程动态映射模型
战场环境仿真过程动态映射是在作战任务关键信息需求驱动下,构建影响作战任务的战场环境模型过程的抽象表达,是作战任务在时空表达上的动态映射。任务过程有其自身的起始位置和目的地位置,自身的下达时间和被完成时间,仿真过程与任务过程在时空特性上相一致,以任务需求关联战场环境要素对象模型,由此,影响战场环境仿真过程动态映射的主要因素包括:作战任务过程(Task_Process)、时间(Time)、位置(Location)、环境仿真对象(Env_Feature)及各类因素的属性与语义关系函数。前述基于GeoBML的战场环境仿真过程逻辑模型已对与作战任务过程关联的仿真过程进行了语义描述,在此基础上战场环境仿真过程动态映射模型可形式化描述为
SPM〈Task_Process,Time,Location,
Env_Feature,V_t,V_l,V,X,f,R〉
式中,Task_Process定义为任务过程集合;Time为时间属性集合;Location为位置属性集合;Env_Feature为所有关联环境仿真对象属性集合,将其限定为任务过程中动态关联的战场环境环境仿真对象集合:Env_Feature={es_1,es_2,es_3,…es_n},e_i(1≤i≤n),es_i表示第i个环境仿真对象属性,n为环境仿真对象属性的数量;V_t为时间属性的值域;V_l为位置属性的值域;V为所有环境仿真对象属性的值域
V=∪V_es_ies_i∈Env_Feature
式中,V_es_i表示环境仿真对象属性es_i的值域;Env_Feature×V为仿真对象属性与值域的笛卡儿乘积,包括了仿真对象属性及其取值的所有组合;R表示仿真过程与任务过程之间的相关程度;X表示在实际应用场景中,战场环境仿真过程及对应取值构成的二元组合,即
X⊆Env_Feature×V
映射函数f表示在当前仿真过程xi∈X下,将每个环境属性es_i∈Env_Feature,映射到对应的情境属性值V_es_i∈V中。
由此仿真过程域可以表示为
X={es_1,f(x,es_1),es_2,fx,es_2,…,
es_n,fx,es_n
式中,当前仿真过程x由n维环境对象属性组成,每维环境对象属性包括“属性—值”的二元组,即(es_i,f(x,es_i))。
实现上述战场环境仿真过程动态映射模型构建的算法形式化描述如下:
(1) 形式化定义作战任务过程。
(2) 对任务过程按照分解粒度及时间序列进行逐级分解,得到具有相互关系的事件序列。
(3) 根据GeoBML对任务信息进行描述,提取任务关键信息需求,判断是否需要建立当前分解粒度的仿真过程模型,若需要则转步骤(4),若不需要则转步骤(2)。
(4) 由分解结果确定与之匹配的仿真过程模型。
(5) 分析仿真过程模型之间的时空逻辑关系。
(6) 建立作战任务过程与仿真过程之间的映射关系。
(7) 生成对应作战任务过程的具体战场环境仿真过程数据。
用UML活动图(UML activity)说明战场环境仿真过程动态映射模型构建,如图6所示。

表1 战场环境仿真过程对象表

图6 战场环境仿真过程动态映射模型UML构建Fig.6 UML construction diagram of dynamic mapping model for battlefield environment simulation process
4 应用实例
面向作战任务的战场环境仿真系统是以作战任务为核心,构建与任务过程相一致的战场环境模型的仿真过程,为战场环境信息在军事人员、指控系统与仿真系统之间传递提供明确无歧义的表达,确保提供高可信度的战场环境模型和逼真的、可量算的交互式虚拟战场环境,辅助军事人员正确认知战场环境。
从作战任务过程特征出发,战场环境仿真过程模型是采用GeoBML实现指控系统下达的任务信息与仿真过程之间信息互操作。在面向服务的体系结构下[23-24],将作战任务过程包括的命令、报告或请求结构化后形成的表达式存储为数据库模型,采用MDA架构[25]将仿真过程模型通过GeoBML定义的功能组件解析指控系统传输的任务信息,而后调用其他功能组件分发给相应的仿真模型,如图7所示。

图7 战场环境仿真过程软件模型示意Fig.7 Example of software model for battlefield environment simulation process
该试验环境是基于XX型战场环境信息系统仿真平台为软件基础平台,采用B/S架构建立组件模块,将基于GeoBML的仿真过程模型嵌入原先的战场环境仿真系统组件中,数据层实现对任务过程信息实时解析与转换,服务层实现对关联环境仿真数据的组织与处理,应用层实现对环境仿真数据的查询与可视化,从而确保仿真系统与指控系统之间一体化无歧义互操作。以地面战术机动任务为例,在某一实时作战任务过程中由合成战术兵团司令部通过指控系统下达给机械化战术分队任务指令,通过战场环境仿真系统获取任务关键信息需求构建与机动任务关联的虚拟战场环境,以验证任务驱动的战场环境仿真过程模型的可行性。具体下达格式化任务指令如下:
你分队于“2016-07-09 15:00:00”开始沿着“黑石头村(116.112,37.948)”经“佟家坟(116.134,39.965)”、至“潭峪(116.143,39.978)”一线于“2016-07-09 16:00:00”前执行隐蔽机动任务以阻止敌逃窜。
将其表示成GeoBML命令后的形式如下:
*隐蔽机动* *合成战术兵团司令部* *战术分队* *开始* *沿着“黑石头村(116.112,37.948)”经“佟家坟(116.134,39.965)”、至“潭峪(116.143,39.978)”一线* *2016-07-09 15:00:00* *2016-07-09 16:00:00* *前* *阻止* 命令_引用_标识1 /命令_引用_标识2/。
GeoBML语法树结构如图8所示。
其中,在GeoBML表示的命令中,非终结符Verb包括“机动”、非终结符“阻止”;非终结符Tasker为合成战术兵团司令部;Taskee为机械化战术分队;非终结符Where中的关键字段为“沿着”、“经”、“至”、“一线”;非终结符Start-When中关键字段为“开始”;非终结符End-When中关键字段为“前”;引用标识“命令_引用_标识1”表示“阻止”对象发生“逃窜”行为需要引用“命令_引用_标识1”中的内容;引用标识“命令_引用_标识2”表示如需引用该命令结构的其他规则可采用标识“命令_引用_标识2”作为引用。

图8 基于GeoBML任务命令语法树Fig.8 Task command syntax tree based on GeoBML
根据上述GeoBML表示的命令对战场环境模型进行映射,通过仿真过程中关联的环境要素及其时空特性形成机动路径相关的威胁区域环境表达,如图9所示。试验结果表明:
(1) 按照任务执行层次选择数据源尺度。从命令解析获取作战单元为“机械化战术分队”,相应的仿真单元调用战场地理环境数据源,加载基础地理环境数据,包括1∶1万矢量地图数据、分辨率为1 m影像数据以及数字高程模型数据。
(2) 构建机动路径选择空间范围与环境要素。从命令解析获取途径位置点,通过基于位置关系选择战场地理环境要素,将任务类型与战场地理环境要素类型区分相结合,使得要素类型作用于相应类型的作战任务,与“隐蔽机动”相关联的地形分析得出威胁区域。
(3) 任务驱动下实时动态过程可视化表达。从命令解析获取任务过程的时态属性,通过时空关系将过程发生的时间、地点、作用的对象以及行为变化按照时间序列进行描述和表达,使得在实际作战过程中空间对象能够在任务驱动下随过程时间发生变化。

图9 战场环境仿真过程表达界面Fig.9 Battlefield environment simulation process expression interface
由此可见,将任务过程与战场环境仿真过程相结合建立任务驱动下的战场环境仿真过程模型,相比传统的战场环境仿真模型能够更有效解析作战任务信息,按照任务需求获取战场环境仿真数据并给予动态实时表达,更具有自主性与适人性。
5 结 论
目前,多数战场环境仿真系统与指控系统下达的任务信息之间的互操作都是基于人工的互操作,即通过军事仿真人员对作战任务信息的分析进而处理成仿真系统能够“理解”的过程,而本文提出作战任务驱动下的战场环境仿真过程模型以作战任务为核心,构建基于GeoBML的仿真过程逻辑关系语义表示,从功能特征上将仿真过程与任务过程进行动态映射,增加过程语义信息解析,因此,该模型主要有以下几个特点:①采用面向对象的方法对作战任务与仿真过程进行结构化语义描述;②基于GeoBML建立战场环境仿真过程逻辑模型并将其转换成XML形式化描述;③定义了仿真过程对象数据结构,通过构建动态映射模型建立仿真过程与作战任务之间的映射关系。但是,本文对作战任务与战场环境仿真过程的描述与结构化建模仍存在局限性;对GeoBML语义扩展及适用性需要进一步探讨;对模型的验证缺乏数学模型的表达,以及模型的应用需要进一步结合目前人工智能计算方法(如机器学习),以适应未来战场环境仿真智能化的需求。