基于e-航海的无人驾驶船舶技术
2018-10-26王程博张新宇李俊杰
王程博, 张新宇, 李俊杰
(大连海事大学航海动态仿真和控制交通行业重点实验室,辽宁 大连 116026)
0 引言
近年来,随着航运业的发展,船舶呈现出大型化、专业化、高速化和智能化特点。e-航海力图整合现有的航海技术,最大限度地促进船舶航行安全,提高海上货物运输效率;无人驾驶船舶结合人工智能技术极大地降低了人为因素对海上运输安全的影响,提高了船舶航行安全水平。e-航海技术和无人驾驶船舶技术的结合,可有效地促进海上运输智能化、信息化的发展,提高海上运输安全。
目前,国内外对e-航海技术开展了多项研究,并取得了一定的成果。欧盟在波罗的海区域建立EfficienSea测试系统,研究在日益增大的海上交通密度下,如何推动海上交通安全、高效和可持续发展,该项目已经开发出了e-航海海事服务集的原型系统,同时开发了一个用于模拟评估航行风险的工具[1-3]。瑞典海事局牵头建立的MONALISA测试项目,旨在通过绿色航线规划、船员证书核查、海道数据测量和海事数据共享,向航运业提供e-航海服务,以及船员认可度高的航线计划交换方法[1-3]。英国、瑞典等11家机构在欧洲北海区域建立了ACCSEAS测试项目,针对降低拥堵海域的航行风险来改善北海地区的通航状态,并通过海事信息与数据交换,协调建立实际测试台与信息数据库(ACCSEAS GIS)[1-3]。中国海事局和集美大学发起上海洋山港e-航海测试项目,为改进VTS(vessel traffic service)的通信功能进行了研究和测试,为中国海域e-航海的用户需求和差距分析提供依据[2-3]。天津港复式航道e-航海试点工程建立了海事服务集信息服务系统,为过往船舶提供航行辅助业务信息和导航信息等服务,实现船对船、岸对船之间的信息互动,以提高港口区域船舶交通组织能力[2-3]。
同时,随着人工智能与通信技术的发展,航运业中的自动化水平逐渐提高,智能船舶、海上智能运输及无人驾驶船舶技术等相关领域的研究也得到广泛关注。Fraunhofer CML[4]完成了MUNIN(maritime unmanned navigation through intelligence in net work)项目,验证了自主船舶的概念,即:主要由自动化车载决策系统引导,由岸边控制站的遥控操作员控制的船舶。文献[5]开发和验证了自主船桥、自主机房、岸边操作中心以及连接船对岸上操作员的通信架构解决方案。罗尔斯罗伊斯公司和瑞典渡船公司Stena Line AB合作研发船舶智能感知系统,推出了“高级无人驾驶船舶应用开发计划”,预计2020年实现利用远程支持和特定功能操作,2025年实现近海无人船舶的远程控制,2030年实现远洋无人船舶的远程控制,2035年实现自主远洋无人船舶[6]。国内对无人驾驶船舶的相关研究较少,2009年至2017年国家海洋局第一海洋研究所、云洲智能科技有限公司、灵鲸科技、哈尔滨工程大学、武汉理工大学以及华中科技大学等国内机构对无人艇技术展开了相关研究,并已经在海洋环境测绘、污染检测和救助打捞等方面取得了较好的成果[7-11],而对于无人驾驶货物运输船舶的研究还处于初始阶段。本文通过分析无人驾驶船舶与e-航海的共性,综述了无人驾驶船舶在e-航海框架下的发展思路,为无人船发展提供参考依据。
1 e-航海总体技术架构概述
IMO(International Maritime Organization)海上安全委员会(MSC,Maritime Safety Committee)第81次会议上,“七国提案”《e-航海战略的发展》被采纳,并采用IALA(international association of lighthouse authorities)提出的“e-航海”定义,即:e-航海是指通过电子的方式,对船上、岸上的海事信息进行协调一致的收集、整合、交换、显示及分析,以增强船舶泊位到泊位的航行能力及其他相关服务,提高海上安全和安保水平,并保护海洋环境。”[12]
e-航海概念的提出,是为了满足当前船舶导航技术以及导助航方式的快速发展,e-航海力图通过融合现有的船舶导助航技术及工具,实现海上运输最优化。e-航海技术框架主要包含三要素:船舶环境、岸基支持环境以及通信系统。船舶环境指的是支持船载传感器提供的所有信息的收集、整合、交换、显示与分析;岸基支持环境指的是支持岸基应用程序的岸基技术服务,如搜救、VTS、港口和MSI(maritime safety information)服务等;通信系统是指船-船、岸-船之间的通信设备与通信链路。为此,可将e-航海总体技术架构简单描述为 “硬币的三个面”,硬币的正反两面分别代表船舶环境与岸基支持环境,硬币的侧面代表链接船方与岸方的通信系统[13]。
2 无人驾驶船舶与e-航海的共性分析
e-航海相关技术体系主要解决四大问题,即:感知、数据、标准、传输[14-17],而这四大因素也正是实现无人驾驶船舶技术创新要解决的关键问题。
2.1 感知
e-航海概念中,第一步就是收集船舶内部和航行环境等信息,实质上就是感知的过程。感知是实现e-航海的基础,感知系统所得到的数据将满足e-航海发展的需求,通过相应的技术处理推动船舶自动化、信息化的发展。感知是无人驾驶船舶的关键技术,无人驾驶船舶需要依靠人工智能手段,对船舶内部数据、船舶导航定位数据、航行环境数据(动态数据、静态数据、助航数据)和岸基支持数据等海上运输相关信息进行智能感知,辅助无人驾驶船舶安全航行。因此,e-航海和无人驾驶船舶在感知上有一定的共性。对于e-航海技术和无人驾驶船舶感知技术来说,需要借助多种设备仪器,对船舶内部信息和船舶外部航行环境进行感知。
船舶内部信息包括机舱内主机转速与燃油消耗、船舶货运设备的状态信息和船舶内部各舱室组件状态信息。这些信息具有多态异构的特点,因此对这些信息的感知技术涉及多节点传感器采集方法、多态异构数据的格式转换和统一数据标准技术[18]。特别是对于货船,需要利用船载微型传感器监测货仓和货物的温度、湿度、压力和气体浓度等相关数据,保障船舶货物的安全运输。对于货仓和货物的监测所涉及到的感知技术有:无线通信技术、射频识别技术、无线传感器网络和自组织网络等技术。
船舶航行环境一般包括航道、水文气象、通航建筑物和海上目标交通状况等信息。因此,需要采用遥感技术、视频检测等技术对航道环境要素感知,以获取船舶安全通航所需要的信息。这些信息包括航道宽度、航道水深分布和航道交通流量等信息[19];需要通过水流传感器、测深仪、风向仪等对水文气象环境进行感知,以获得风速、风向、流速、流向、能见度、湿度、温度、水深、大气压和降水量等信息[20]。
2.2 数据
e-航海感知应用系统,可采集到大量的海上数据。在大数据时代,e-航海岸基支持中心必须建立专业的数据中心,对海事大数据进行存储及挖掘分析,并为各种e-航海应用系统提供数据支持服务及数据存取接口[21]。数据作为e-航海技术体系解决的主要问题之一,也驱动着无人驾驶船舶的发展,无人驾驶船舶的航行决策以及智能服务均需要大量的数据,对这些数据进行智能分析并应用,从而保障船舶航行安全。例如,无人驾驶船舶需要对视觉图像或雷达等传感器采集到的航行环境信息进行深度学习,将这些数据作为无人驾驶系统网络的输入进行学习,通过对历史航行数据及历史碰撞事故数据的学习及预测后,输出本船的行为决策命令。
海事数据涵盖面广且具有多源异构特征,如何有效地使用这些数据,推进e-航海和无人驾驶技术的发展,是一个亟待解决的问题。传统的方法有聚类分析、抽样分析等,寻找数据之间的关联以及数据和实际的映射关系。随着大数据技术的发展,与传统方法不同的是,大数据技术不追求算法的繁琐性,而追求更高效地对整个数据集挖掘有用的信息。目前应用在e-航海战略实施和无人驾驶船舶技术发展方面的数据分析方法有:深度学习法、专家系统和知识计算法,通过人工神经网络的方法构建复杂的模型,并有效地应用在船舶交通流量预测[22]、船舶异常行为预测[23]和船舶种类识别[24]等方面。
2.3 标准
感知是技术基础,数据是基础要素,而数据标准则是核心。2010年, IMO、IALA等国际组织决定,采用IHO(International Hydrographic Organization)的S-100作为e-航海的海上通用数据标准[25-26]。目前,国内外的e-航海测试系统中的船载系统、岸基系统、船岸直接的通信系统都在采用S-100 进行产品规范,推动e-航海的建设。对于无人驾驶船舶来说,不管是数据的采集、感知或存取,还是数据服务都应该使用统一的海事数据结构(CMDS),即数据标准,满足岸与船等不同平台之间的信息交换。
2.4 传输
信息传输是e-航海技术架构的重要组成部分。目前,海上信息传输基本采用物理通信链路,通过物理通信链路连接船载导助航仪器数据与岸基支持服务[27]。陈亮等[28]提出海上甚高频宽带数据传输技术方法降低了海上信息传输的误码率,提高了传输效率,促进了e-航海信息传输的发展。无人驾驶船舶需要将数据在不同系统平台或用户之间有效地进行传输,包括船对船、船对岸之间的传输,因此,e-航海信息传输可为无人驾驶船舶的智能通信奠定基础,无人驾驶船舶技术系统可直接应用e-航海信息传输。IMO与IALA提出 “海事云”概念,海事云可以将船舶环境与岸基支持环境无缝连接[14],有效的解决e-航海发展中的数据有效传输难题,提高无人驾驶船舶通信的智能化水平。
3 航海框架下无人驾驶船舶技术的发展思路
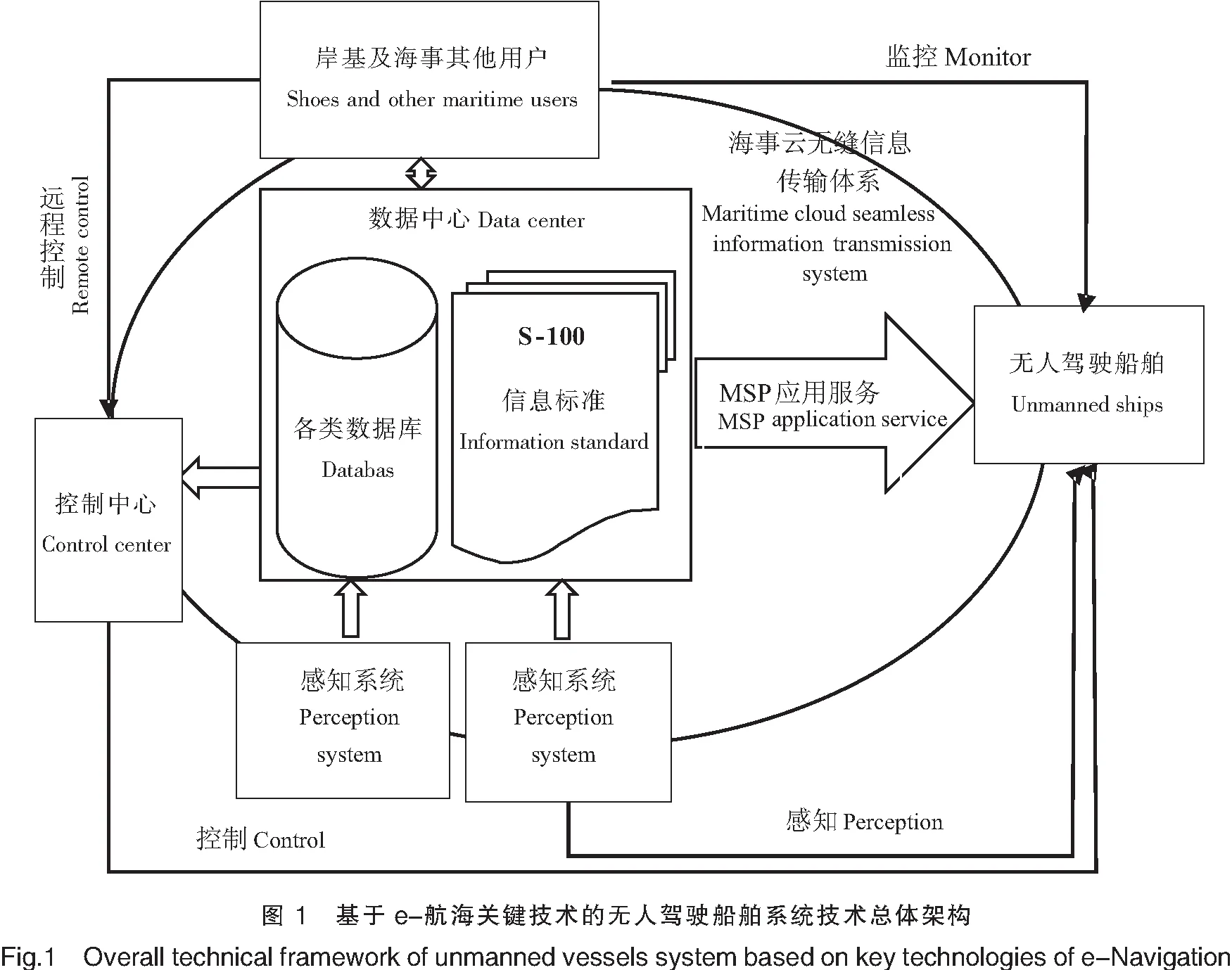
e-航海依托解决感知、数据、标准、传输这四大问题,由理论走向现实应用,e-航海技术的应用为无人驾驶船舶的发展奠定了基础,而无人驾驶船舶的发展也促进了e-航海战略的实施[29-30]。基于e-航海的无人驾驶船舶系统技术总体架构如图1所示,它融合了e-航海技术与无人驾驶船舶技术,在数据中心以S-100为标准,对无人驾驶船舶感知到的信息建立数据库,通过“海事云”向船舶与岸基平台传输信息。
3.1 智能感知
无人驾驶船舶为了更好地保障航行安全,不仅要满足SLOAS公约中船载设备的安装,还需要配备更多的传感器,对船舶内部状态信息和航行环境进行智能感知。航行环境感知主要是定位与物体识别,在感知阶段,随着e-航海技术的发展及基础设施的完善,无人驾驶船舶智能感知技术也需要进一步发展。
1)扩大感知范围。目前,海事感知系统大多采用传感器直接接触的传统感知技术,例如多功能浮标加载的潮流传感器、测深仪等,这些感知技术的缺点就是传感面窄,不能进行大范围信息感知。因此,应进一步发展与创新大范围感知技术,比如卫星遥感技术、激光雷达监测技术等,扩大无人驾驶船舶感知范围,进而为无人驾驶系统智能决策取得足够的时间。
2)提高海上小型移动目标的识别能力。对于无人驾驶船舶来说,雷达等传感器往往会忽略或过滤掉移动小型物体,因此应该结合多个传感器,进行智能组合,完成海上移动小型目标识别,提高海上小型移动目标的识别能力。另一方面,在海上弱小目标探测方面,应采取船载移动视频技术,如电子稳像方法[31],滤除图像抖动,为海上小型移动目标的识别提供稳定的数据。
3.2 智能决策
无人驾驶船舶的智能决策是指在给定感知模块解析出的环境信息的基础上控制船舶行为,以保证航行安全。无人驾驶船舶的高层行为可以分为加速、减速、左舵、右舵、直航和紧急停车,智能决策系统根据目标选择执行高层行为。无人驾驶船舶的智能决策系统,按照统一的e-航海岸基系统标准建立数据中心,汇总各类海事数据。海事数据中心提供用户应用接口,使无人驾驶船舶的各类应用都可以从数据中心获取数据。大数据技术将提高数据驱动的无人驾驶与人工智能融合的能力。
目前S-100为e-航海通用海事信息标准,因此,无人驾驶船舶智能决策系统应组织研究专属的S-100数据标准,统一决策系统内各类海事数据标准,为无人驾驶船舶产业化发展创造条件。
3.3 智能通信
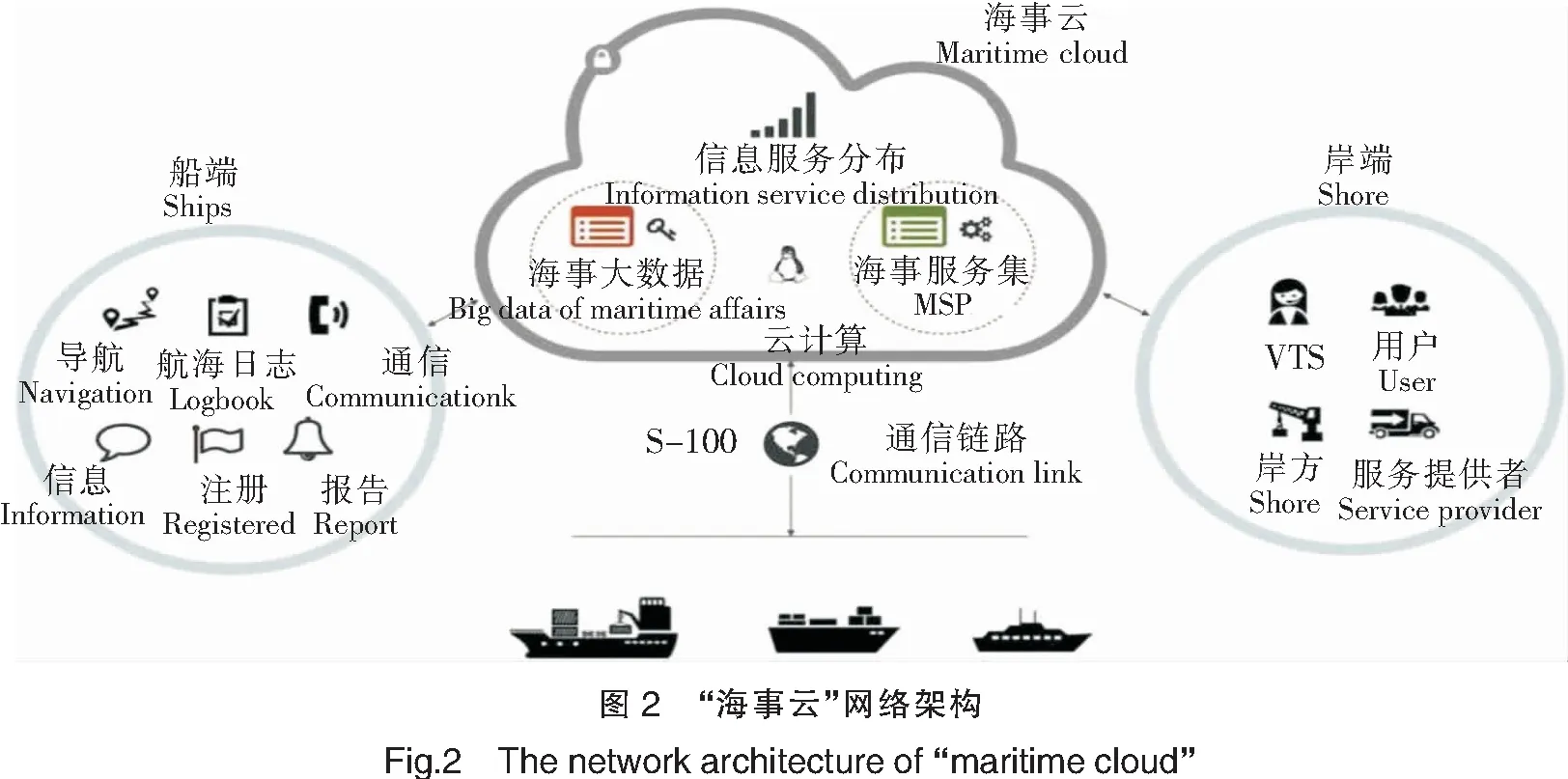
“海事云”应用船联网感知技术,实现对船舶、岸基等海事管理要素的全面感知,并通过多种接入方式将感知的信息传输至海事支持信息通信网[32]。图2为海事云基础网络架构,该网络由船端、岸端和云端三部分组成。总体上,“海事云”整合了船端与岸端信息资源,提升了信息资源的深度开发与在无人驾驶技术的综合利用水平,促进了云计算与海事管理及服务的深度融合,提高了无人驾驶船舶的智能通信技术。
4 结论
本文探讨了无人驾驶船舶技术与e-航海技术的共性,提出了基于e-航海的无人驾驶船舶系统技术总体架构,探讨了无人驾驶船舶智能感知、智能决策和智能通信在e-航海框架下的发展思路。随着e-航海的全面实施,无人驾驶船舶与e-航海的共性技术,感知、数据和传输应以e-航海为基础,不断发展,为无人驾驶船舶智能决策提供服务。