基于DSP微处理器的无人机飞控系统设计
2018-10-25,,,,
,,,,
(南京航空航天大学自动化学院,江苏 南京 210016)
0 引言
无人驾驶飞行器是一种由操纵手远程遥控实现飞行或者由飞控系统中的程序算法自主控制飞行的新型飞行器,简称无人机(UAV)。区别于卫星、气球、导弹等无人飞行设备,无人机应具备完整的飞行系统,包括地面监测与指令传送系统、飞行控制系统、任务载荷与综合保障系统等[1]。目前,无论是固定翼无人机还是旋翼类无人机,都在军事和民用两方面扮演着越来越重要的角色。军用无人机在军事演习、战场评估、敌情侦查与检测中节约了大量的人力和物力[2]。而在民用方面,以四旋翼无人机为代表的消费级航拍无人机大大丰富了人们的业余生活,也促进了经济与科技的增长。
在无人机系统的设计中,控制系统始终是最重要的一部分,它如同无人机的大脑,需要实时地进行信息的采集以及控制量的输出[3]。而控制系统又是围绕控制律展开的,性能良好的控制器是控制系统的灵魂。在此,针对一种固定翼机型进行飞行控制律设计及飞控系统的总体硬件设计,使得该型号的无人机能够按照给定的航线完成飞行任务,并完成该机型的仿真实验和飞行试验。
1 固定翼无人机控制器设计
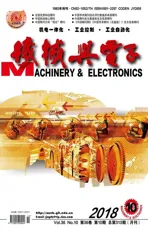
如图1所示,固定翼无人机的控制回路分为内回路和外回路。姿态控制回路作为飞行控制系统的内回路,需要飞机的姿态角信号作为控制反馈,是整个飞行控制系统的核心回路[4]。同时,内回路需要引入姿态角速率信号反馈到姿态回路的输入端,从而增加系统的阻尼,改善系统的动态性能[5]。飞行控制系统的外回路是位置控制回路,也称为制导回路,目的是让无人机能够按照一定的航迹飞行,因此需要无人机的位置信号作为反馈。位置回路的输入是待飞的航迹点信息,通过计算可得到所需的姿态角,并作为姿态控制回路的给定信号输入至内回路。姿态控制回路通过控制气动舵面的偏转,逼近期望的姿态角,最终实现按照航迹飞行。
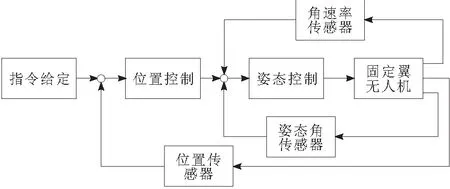
图1 固定翼无人机控制系统框图
飞行控制系统一般分俯仰、滚转、航向3个通道来设计[6]。而无人机的运动可以分为纵向运动和横侧向运动,因此可以将纵向运动对应于俯仰通道,横侧向运动对应于滚转、航向通道。
1.1 纵向通道控制器设计
如图2所示,俯仰角控制回路采用比例控制,同时叠加俯仰角速率信号以增加系统的阻尼,改善动态性能。

图2 固定翼无人机俯仰角回路控制律
另外,由于飞机通过滚转实现转弯,因此当飞机转弯时,升降舵效率下降,为了补偿因滚转角而损失的升力,需额外增加一定的出舵量,以维持一定的高度。其控制律可以写为:
δe=Kθ(θ-θg)+Kq·q-
Kγz(1-cosφ)/cosφ
(1)
θg为俯仰角给定信号;θ为俯仰角;Kθ为比例系数;q为俯仰角速率;Kq为角速率反馈系数;δe为方向舵的出舵量;φ为滚转角;Kγz为修正系数。
如图3所示,高度控制回路采用比例-积分控制,以增加系统的型别,从而增加控制系统的精度。同时,叠加升降率信号以增加系统的阻尼[7],改善动态性能,其控制律可以写为:
(2)
Hg为高度给定;Kh为比例系数;h为传感器反馈的高度信息;Khi为积分系数;Khd为升降率反馈系数。

图3 固定翼无人机高度回路控制律
1.2 横侧向控制器设计
固定翼无人机滚转角回路控制律,如图4所示。
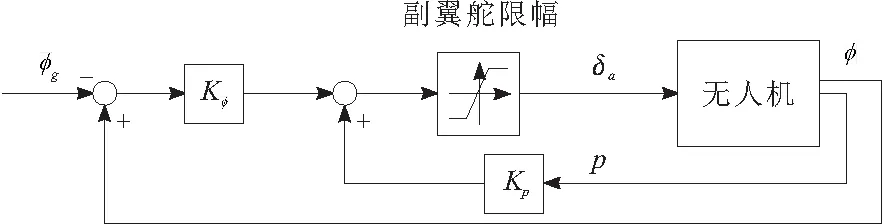
图4 固定翼无人机滚转角回路控制律
滚转角控制回路的原理同俯仰角控制,其控制律为:
δa=Kφ(φ-φg)+Kp·p
(3)
δa为副翼舵控制输出量;φg为滚转角给定值;Kφ为比例系数;p为滚转角度率;Kp为滚转角速率反馈系数。
固定翼无人机航向回路控制律,如图5所示。

图5 固定翼无人机航向回路控制律
由于偏航角速率与滚转角速率之间存在耦合,无人机依靠滚转实现航向的改变。航向的偏差信号作为滚转控制回路的输入,引起副翼的偏转,从而实现给定的航向。方向舵主要起到系统增稳的作用,依靠侧滑角和偏航角速度的反馈来减少无人机的侧滑。因此,航向回路的控制律可以写为:
φg=Kφφ(φg-φ)
(4)
δr=Krr+Kβ·β
(5)
φg为计算出的滚转角期望值;Kφφ为航向偏差比例系数;φg为航向给定值;φ为偏航角;δr为方向舵控制量;r为偏航角速率;Kr为偏航角速率反馈增益;β为侧滑角;Kβ为侧滑角反馈增益。
固定翼无人机横侧向外回路控制律,如图6所示。

图6 固定翼无人机横侧向外回路控制律
横侧向外回路主要使用航偏角ΔΨ和航偏距d作为横侧向内回路的输入,以修正偏差,使得飞机向理想航迹点逼近。同时,在航偏角回路加入速度反馈系数,以增加系统的阻尼。因此横侧向外回路的控制律为:
(6)
Ψg为给定航迹角;Ψ为航迹角;KΨ,Kd为比例系数;V为速度反馈;Kdi为积分系数。
2 系统硬件总体设计
该无人机系统由地面监测与指令传送系统、飞控计算机系统、伺服执行机构和传感器系统组成。结构如图7所示。
图7 无人机系统组成
2.1 传感器系统
在控制系统中,传感器系统是控制回路的反馈环节,是自动控制的关键[8]。飞机的传感器系统包括2个部分:GPS位置传感器主要负责采集飞机经纬度信号、飞行海拔高度、飞行速度和航向信号;惯性测量单元(IMU)主要负责采集飞机姿态角信号和飞机姿态角速率。在此,使用的GPS和IMU 的数据输出均为TTL电平的RS232串口信号,可直接将数据发送至飞控计算机的串口。
2.2 执行机构
固定翼无人机的执行机构主要包括气动控制舵面和推力控制机构。本文中的无人机气动舵面包括左右副翼舵,左右升降舵和方向舵。推力控制机构是通过一个专用的油门舵机控制发动机的油门开度来实现的。在此,采用6个舵机为标准航模舵机,舵机的控制信号为5%~10%占空比的PWM波。因此,可通过配置DSP28335微处理器的GPIO引脚进行PWM波的输出,进而来控制舵机的转动。
2.3 地面监测与指令传送系统
无人机进行超视距飞行时,地面监测与指令传送系统是了解飞机状态的唯一的方式,工作人员通过指令传送系统,可以控制飞机的飞行,通过通信系统发送指令给飞机,实现人在回路控制。
如图8所示,地面监测与指令传送系统的硬件部分包括工控机、无线数据电台、DSP信号处理器、操纵杆和指令盘。其中,俯仰、滚转、油门、航向4路操纵杆由4个可变电阻器组成,可输出0~3.3 V的模拟电压。指令盘由10个按键组成,按键被按下时输出低电平,否则输出高电平。DSP处理器可通过A/D通道对4路杆量进行采集,可通过GPIO引脚获得每个按键的状态。DSP处理器将采集来的信号打包成数据,通过串口将数据发送至工控机。运行在工控机中的地面测控软件接收到数据后,将数据按照协议进行解析,并实时地在界面上显示出按键的状态和4路杆量值的大小,通过电台将指令和杆量数据发送至飞控计算机系统,从而控制和改变飞机的运行状态。

图8 地面监测与指令传送系统的硬件组成
2.4 飞控计算机系统
飞控计算机系统是无人机飞行控制的核心,主要负责处理飞行控制策略,管理各种飞行模式,采集各类传感器数据,最终根据控制算法实时地将控制量输出至执行机构。飞控计算机的核心采用TI公司的TMS320F28335型号的芯片,这是一款面向数字控制、运动控制的微处理器。该芯片运算速度快、精度高、集成度高,其内部集成了多路串口以及I2C,A/D,D/A通道等片内外设资源,主频率最大可达150 MHz,非常适合用于对实时性要求比较高的控制系统[9]。
如图9所示,飞控计算机需要通过RS232串口实时地采集GPS位置传感器和IMU姿态传感器采集的数据,并按照各个传感器的通信协议进行数据的解析。飞控计算机可以通过飞控算法计算出系统当前的控制输出量,最终输出一定大小占空比的PWM波以控制舵机的转动角度。飞控计算机同时需要利用A/D通道采集供电电源的输出电压,防止由于电池过放引起的事故。飞控计算机还需要通过机载数据电台将飞机的飞行数据实时地传送至地面监测系统,地面指令控制系统也需要通过地面数据电台将控制指令和操纵杆量实时地发送至飞控计算机,经过拉距测试,测得实际所用的电台传输距离为15 km,满足飞行要求。

图9 飞控计算机系统组成
3 无人机系统仿真实验
无人机在试飞前需要根据飞机的数学模型对控制律进行仿真实验,以确保控制律的正确性。
如图10所示,飞机仿真定高450 m,采用弹射起飞方式,因此存在一定的超调,经过一点时间后,可以稳定在450 m左右。飞机降落前先定高200 m,以减少降落时的时速。

图10 仿真飞行高度
如图11所示,在飞机向正北方向直飞的过程中加入一定的扰动,一段时间后飞机能够自主地回到航迹上继续飞行。由于飞行给定航迹是一个矩形,因此飞机转弯时存在一定的超调,经过一定时间可以回到预定的航迹继续飞行,最终实现按给定的航迹进行飞行。
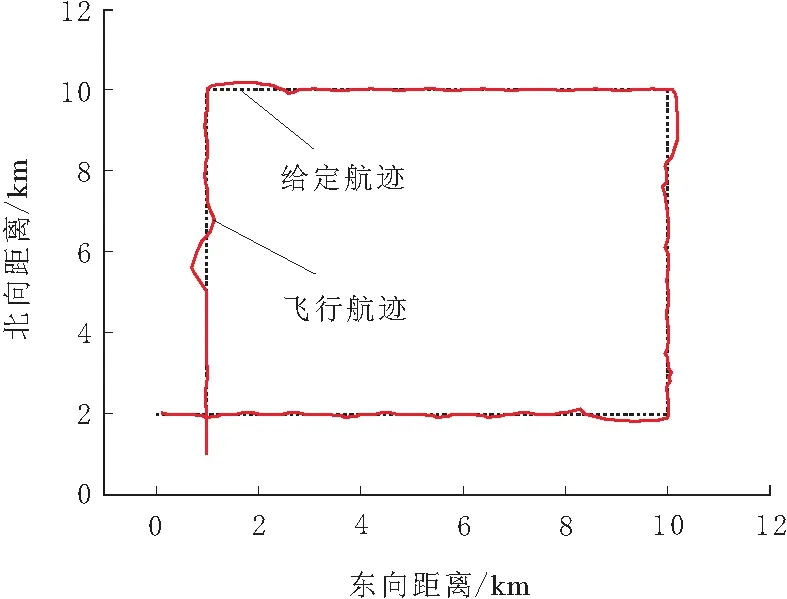
图11 仿真飞行航迹
4 结束语
先围绕固定翼飞机的控制器设计展开,分别完成飞控内回路及外回路的控制律设计,再以DSP28335为中心,介绍了飞控系统的硬件组成及硬件之间的逻辑关系。最后,对飞控系统的仿真实验数据说明,所设计的飞控系统具有按给定航迹飞行的能力,可以完成相应的飞行任务。