特种运输车装备主动悬架振动控制策略研究
2018-10-25,,,
,,,
(西北工业大学力学与土木建筑学院,陕西 西安 710072)
0 引言
特种运输车辆运载武器装备的路途中,由于其行驶的路况环境极为复杂,由此所造成的车体剧烈振动会严重影响到武器装备的安全性。为了改善某型车辆运送装备的抗振性能,在对该车辆山路高速行驶振动实测的基础上,提出了装备主动悬架模糊-PID控制。随着现代控制理论的不断完善和发展,越来越多的控制理论如天棚-地棚控制、最优控制、神经网络控制等被运用到汽车悬架系统[1]。陈学文[2]等对汽车1/4悬架进行了PID控制仿真。宋晓琳[3]等对汽车悬架模糊控制器进行了仿真研究。Phalke[4]对1/4汽车悬架进行了平顺性分析。Sharkawy[5]对汽车自适应模糊控制悬架进行了研究。但是,目前对车辆悬架动力学响应控制的研究主要集中在小型汽车,涉及到运载装备的特种车辆的研究成果尚不多见。与普通汽车相比,特种车辆身长、惯性大,高速行驶时稳定性差,会严重影响到运送装备的安全性。相比于其他控制理论而言,PID控制原理简单,稳定性好,参数相互独立且整定比较容易,便于实现;模糊控制是根据语言规则判断设计的一种算法,具备一定的智能性,对于一些数学模型难以获取、动态特性变化明显的对象适用性强[1]。在此,结合PID控制理论和模糊控制技术,设计了模糊-PID控制器并在MATLAB/Simulink平台中构建了装备主动悬架模糊-PID控制模型。
1 系统动力学模型及路面激励
1.1 动力学模型
车辆在运送某种装备时,装备安放在车辆纵向对称面的中线上,根据实际情况,由于车身左右摇摆振动较小,装备与车辆整车系统被简化为图1所示的平面动力学模型[6]。模型共有6个自由度,分别表示悬挂、车身和装备的运动,将坐标系建立在行进的车辆上,可得到如下六自由度运动微分方程。

图1 装备与运输车辆模型
(1)
k3y1(t)-k3y2(t)-k3eθ(t)=0
(2)
2k4y3(t)-2k4y4(t)+(ek3-
2L1k4+2k4L2)θ(t)=0
(3)
2k4y2(t)+(2k4+k5)y3(t)+2k4L1θ(t)=
k5U1(t)
(4)
2k4y2(t)+(2k4+k5)y4(t)-2k4L2θ(t)=
k5U2(t)
(5)
2k4L1)y2(t)+2k4L1y3(t)-2k4L2y4(t)+
(6)


图2 装备主动悬架模型
k3y1(t)-k3y2(t)-k3eθ(t)-F=0
(7)
(k3+4k4)y2(t)-2k4y3(t)-2k4y4(t)+
(ek3-2L1k4+2k4L2)θ(t)+F=0
(8)
2k4y2(t)+(2k4+k5)y3(t)+2k4L1θ(t)=k5U1(t)
(9)
2k4y2(t)+(2k4+k5)y4(t)-2k4L2θ(t)=k5U2(t)
(10)
2k4L1)y2(t)+2k4L1y3(t)-2k4L2y4(t)+
(11)
装备与运输车模型的参数和物理意义,如表1所示。

表1 模型参数及物理意义
1.2 路面激励
在此,主要针对式(7)~式(11),着重考虑车辆高速行驶时路面激励对武器装备垂直方向的振动响应。车辆行驶过程中,主要受到道路凹凸不平和车辆急转等因素引起的激励[8]。
a.工况1。随机路面输入最能反映车辆行驶时的实际路面情况,可以用一白噪声通过积分器来模拟C级路面不平度,其时域描述形式为:
(12)
xr(t)为随机路面垂直位移激励;Gq(n0)为路面不平度系数;n0为参考空间频率(n0=0.1 m-1);v为运输车行驶速度(取20 m/s);w(t)是均值为零的单位白噪声。
b.工况2。考虑到道路凹凸不平的特殊路面,如沟、坎等[9-10],当车辆以一定的速度通过行驶在该种路面上,路面会通过轮胎给装备与车辆系统施加一个冲击作用,这种特殊情况会严重威胁到装备的安全性。采用矩形脉冲函数来模拟路面的沟和坎,假设车辆在t0时刻遇到一个坎,并以车速v驶过,坎的高度为A,坎的长度为d,选用Simulink中的Signal Builder模块进行仿真,取A=0.2 m,d=0.8 m,t0=1 s,车速v=20 m/s。
(13)
2 模糊-PID控制器设计
2.1 PID控制原理
PID控制器是根据被控对象的输出量与期望值之间相对误差的比例、积分、微分环节决定被控对象的控制量[11]。PID控制规律为:
(14)
F(t)代表控制器的输出量,即装备主动悬架中的控制力;KP,KI,KD分别为比例、积分、微分增益系数;e(t)为期望值与实际输出量的差值,即装备质心垂直振动速度变化量。通过模糊控制器自动调节比例系数KP,KI,KD的值,就可以充分发挥PID控制的作用,使所运送装备的振动得到有效的控制。
2.2 模糊-PID控制原理
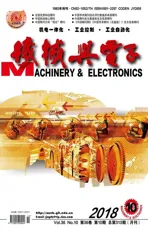
模糊-PID控制即把模糊控制规则运用到PID控制参数整定中去,它以装备质心垂直振动速度变化量e和装备质心垂直振动加速度变化量ec作为输入变量,输出变量是影响PID 调节的3个参数kP,kI,kD的增量ΔkP,ΔkI,ΔkD。首先进行模糊化计算,然后根据模糊控制规则进行逻辑推理判断并通过解模糊使PID的3个参数kP,kI与kD得到自动调整[12]。最后,利用得到ΔkP,ΔkI,ΔkD的值通过PID控制输出控制力F作用到装备主动悬架系统。其大致原理如图3所示。
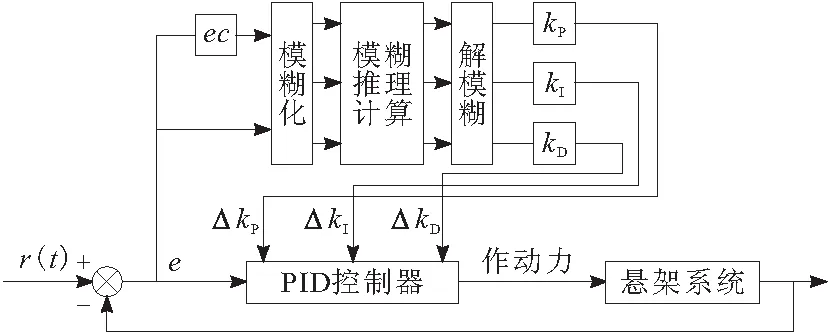
图3 模糊-PID控制原理
调整公式:
(15)
kP,kI,kD为PID最终控制器的参数;kP0,kI0,kD0为PID控制初始整定参数;ΔkP,ΔkI,ΔkD为模糊控制器的输出量;qP,qI,qD为修正系数。
2.3 变量的模糊化
本文设计的模糊控制器是1个两输入三输出的模型,选取武器装备质心垂直振动,速度变化量e和装备质心垂直振动加速度变化量ec作为控制器的输入变量;ΔkP,ΔkI,ΔkD作为控制器的输出变量。输入与输出变量的函数语言变量模糊集均采用7个模糊子集来描述,即e,ec={NB,NM,NS,ZO,PS,PM,PB},各元素分别代表负大、负中、负小、零、正小、正中、正大。其相应的模糊论域大小均为[-6,6]。模糊推理采用Mamdani法[13-14]。根据专家知识和设计人员的实际经验,当武器装备垂直速度与加速度符号相异时,有相互抵消的趋势,可以适当减小控制量;当二者符号相同时,则需适当加大控制量以抑制其增大趋势[15]。考虑到控制系统的稳定性、鲁棒性和灵敏性,输入与输出变量的隶属度函数均采取三角形函数为:
(16)
2.4 模糊清晰化
模糊清晰化的作用是将模糊推理输出的模糊量转换成精确量,这是一个从模糊集合到普通集合的映射[14]。常用的解模糊化方法有最大隶属度法、中位数法、加权平均法、重心法、求和法和估值法等。由于重心法能使系统的输出更为平滑,得到的结果更精确,故采用重心法对输出量进行解模糊化。
(17)
Ci和μ(Ci)分别是模糊输出元素和它的隶属度,i为输出元素个数。
3 仿真结果及分析
根据装备与车辆动力学系统微分方程,在MATLAB/Simulink平台下构建系统仿真模型,设置仿真时间为30 s,在2种工况下对装备主动悬架进行仿真。在相同的外激励下,对动力学系统的被动模型和PID控制、模糊控制的主动模型进行了仿真对比分析。
图4~图6为随机路面激励下,装备加速度、速度、动位移的时域变化曲线。由图4~图6可知,相对于被动控制,3种主动控制方式对装备的振动特性控制效果均有不同程度的提高,其中,模糊-PID控制优于PID控制和模糊控制。

图4 装备加速度对比

图5 装备速度对比

图6 装备动位移对比
图7~图9 为冲击路面激励下,装备加速度、速度、动位移的时域变化曲线。由曲线可知,PID和模糊-PID控制曲线的衰减时间明显小于被动控制,提高了装备悬架的抗冲击能力。模糊-PID控制相对于PID控制有较小程度的改善,表明模糊-PID是一个在线整定寻优的过程。

图7 装备加速度对比
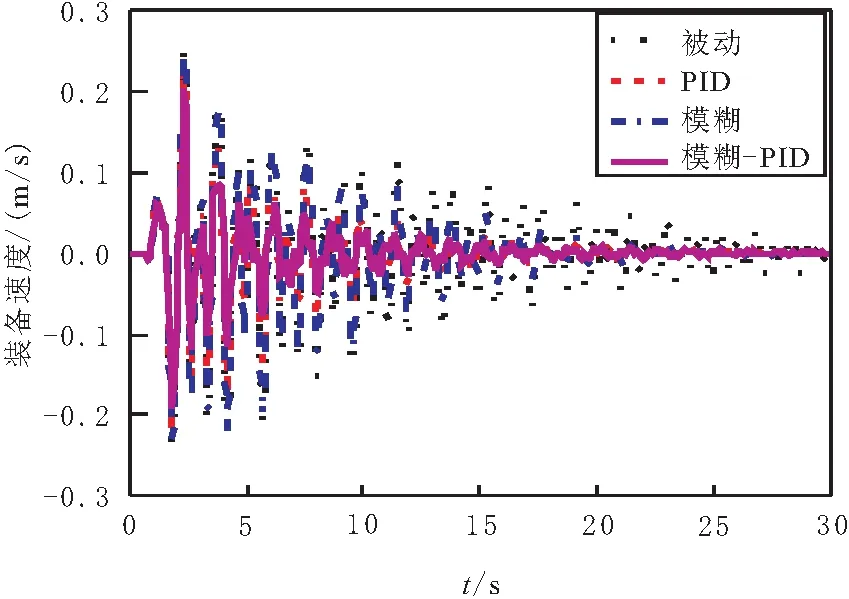
图8 装备速度对比

图9 装备动位移对比
图10和图11分别为工况1、工况2下不同控制方式的装备加速度幅值频谱曲线,可以看出,模糊-PID在改善装备振动性能方面明显最优。同时由图10可知,模糊-PID控制下装备加速度的频率低于被动控制,这对整车系统的减振效果具有一定积极影响。
图10 工况1装备加速度幅值频谱对比
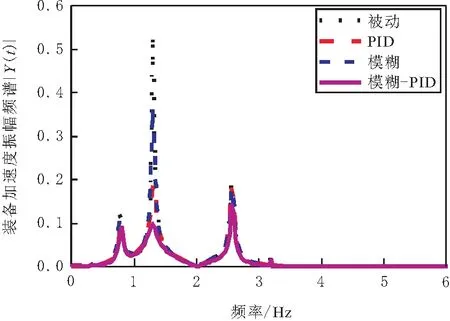
图11 工况2 装备加速度幅值频谱对比
为了验证模糊-PID控制器在装备悬架控制中的优越性,提取随机路面激励下装备悬架性能指标均方根值进行对比,结果如表2所示。
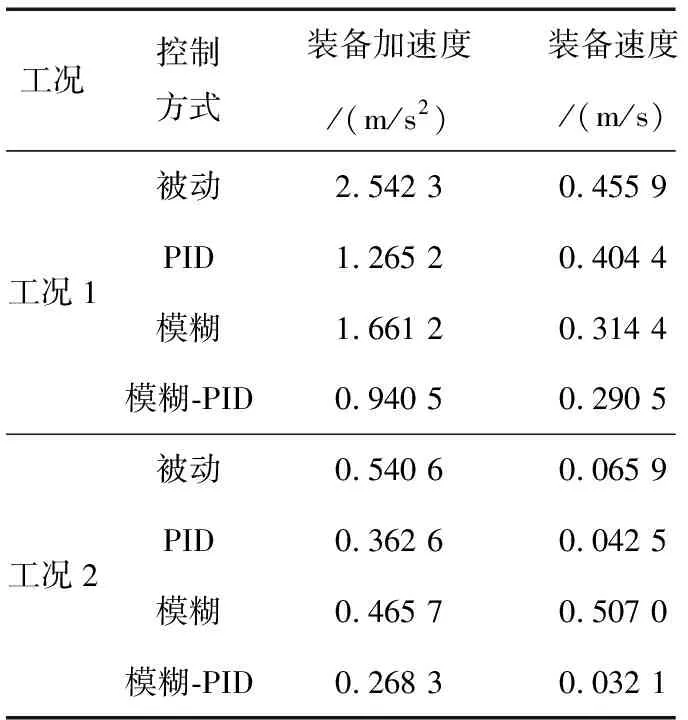
表2 装备悬架性能均方根值对比
工况1中,模糊-PID控制相比被动控制,装备加速度减少了63%,装备动位移减幅达到62%,装备速度降低36.8%;工况2中,模糊-PID控制相比被动控制,装备加速度减少了50.4%,装备动位移减幅达到51.3%,装备速度降低55.3%。
4 结束语
推导建立了特种运输车与装备的动力学方程,基于此基础简化为五自由度装备主动悬架动力学模型。设计了模糊-PID控制器,在随机路面激励和冲击路面激励2种工况下进行动力学仿真,并与其他控制方式进行了对比分析。结果表明,相比被动控制,装备悬架的性能均得到了不同程度的改善并且优于其他控制策略,说明模糊-PID控制系统减振效果好、鲁棒性高,武器装备运输的安全性可以得到保障。