采煤机模糊自适应PID控制分析
2018-10-23李志庆
李志庆
(山西汾西矿业集团宜兴煤业, 山西 孝义 032302)
引言
计算机技术的应用已经延伸到各个领域,为采煤机控制提供了新的思路[1-2],并且可以把技术人员的经验与智能算法综合起来。工控计算机在被运用之前就已经设置好各种算法,这些算法将对参数进行比照并得出一组最优参数,从而可以实现自动调整PID参数[3]。这种控制方法最大优点在于不需要建立精确的数学模型,通过把运行的数据采用数学方法模型化控制规则,经过在线推理完成PID参数的修改过程,整个过程就是模糊自适应PID控制,可靠性较高、修改参数简单等优点[4-5]。
1 系统控制方法
滚筒高度的调整是通过使用液压阀对油缸中的活塞杆伸缩驱动采煤机摇臂实现的。其中,调高机构、采煤机液压系统是非线性的,同时煤层结构复杂多变具有不稳定性。从以上几个方面可以看出,采煤机在进行记忆调高时的调高负载是非线性的,因此需要及时对PID控制器参数进行调节,否则就会出现失控的情况。传统的PID控制器参数的整定方法通常是由操作人员进行试凑方法完成,存在反馈过慢的问题,使参数设置不能实时调整。在此过程中需要连续进行生产就需要对参数进行实时调节,常规的PID无法达到其效果。
2 组成及原理
从模糊PID控制器原理图看出,输入量是输入信号与输出信号的偏差e,同时记偏差变化率Ce,输出量为 ΔkP、ΔkI、ΔkD。其中,Ge和 GCe作为量化因子,而GkP、GkI和GkD则作为比例因子,依照对象输入量、输出量选取取值范围。对控制对象进行模糊推理得到 ΔkP、ΔkI、ΔkD分别作为 kP、kI、kD参数增量,PID 参数在线调节完成,基本原理图如1所示。PID参数调整计算公式如下:
式中:kP、kI、kD为比例、积分、微分系数;kP0、kI0、kD0为各个参数的初始值;模糊推理结果是{e,Ce}P、{e,Ce}I、{e,Ce}D。

图1 模糊PID控制原理框图
3 模糊自适应PID控制器的设计
实现采煤机记忆截割的重要因素是模糊自适应PID控制器设计是否合理,它决定了最后的控制效果。人工示范刀作为基准数据存储在计算机中并在计算机程序和算法下形成轨迹,此后在每一次截割循环过程进行跟踪,算出滚筒的高度误差及其误差变化率,采取模糊自适应控制器的控制规则将得到输出量在线对PID参数进行修改,最后将得到的参数以采用电液比例方向阀控制液压缸动作来完成对采高的控制[6]。
3.1 模糊控制器结构
在模糊控制器输入端的数目表示模糊控制器的维数。维数的高低是控制精度的决定因子,提高维数虽然提高了控制精度,但同时使控制规则变得复杂,最后导致算法难以实现。本设计选取二输入三输出结构形式的模糊控制器,这样可以同时在满足足够高精度的前提下算法简单,其中输入量为误差e和误差变化率Ce。另外三个输出量分别为PID控制参数 kP、kI、kD的增量 ΔkP、ΔkI、ΔkD。
3.2 输入、输出变量和模糊化语言
在采煤机截割煤层人工示范下,输入变量误差e是基准截割循环j0的相邻采样差值,设第i个高度是和第 i-1个高度是(L/Δx)),工作面的长度L,采样间隔 Δx=1.0 m。则输入变量误差为:

误差变化率为:

结合记忆截割的显著特征和专家的丰富实践,输入变量误差e和误差变化率Ce及输出变量ΔkP、ΔkI、ΔkD量化后为 E、CE、ΔkP、ΔkI、ΔkD。其中 E、CE、ΔkP、ΔkI、ΔkD的模糊子集均取为:
E、CE、ΔkP、ΔkI、ΔkD={NB,NM,NS,ZO,PS,PM,PB}.
论域均取为:
E、CE、ΔkP={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},ΔkI、ΔkD={-0.06,-0.05,-0.04,-0.03,-0.02,-0.01,0
0.01,0.02,0.03,0.04,0.05,0.06}.
其中{NB,NM,NS,ZO,PS,PM,PB}分别代表负大,负中,负小,零,正小,正中,正大。
3.3 模糊化精确量
模糊变量赋值的含义是指用确定论域内元素所对应模糊语言变量的隶属度。通常我们采用隶属度函数确定模糊分布。常用的有三角型、高斯型、梯型三种。在实际应用过程中,鉴于计算三角形或梯形隶属函数使用起来较为简单,且与其他类型的隶属函数相比较而言输入值的灵敏性更大,所以只要可在满足精度要求的情况下,通常都可使用三角形或者梯形作为模糊集合的隶属函数。综合以上分析结果,本文 E、CE、ΔkP、ΔkI、ΔkD都采用三角型隶属函数。
三角型:用三个参数表示(a,b,c),如公式(4)所示:
3.4 模糊控制规则
在采煤机进行调高的过程中,模糊自适应PID控制规则确定时不仅需要遵循PID参数自整定原则还要截割技术人员的实际工作经验,调高系统模糊控制规则表设计情况在表1列出。
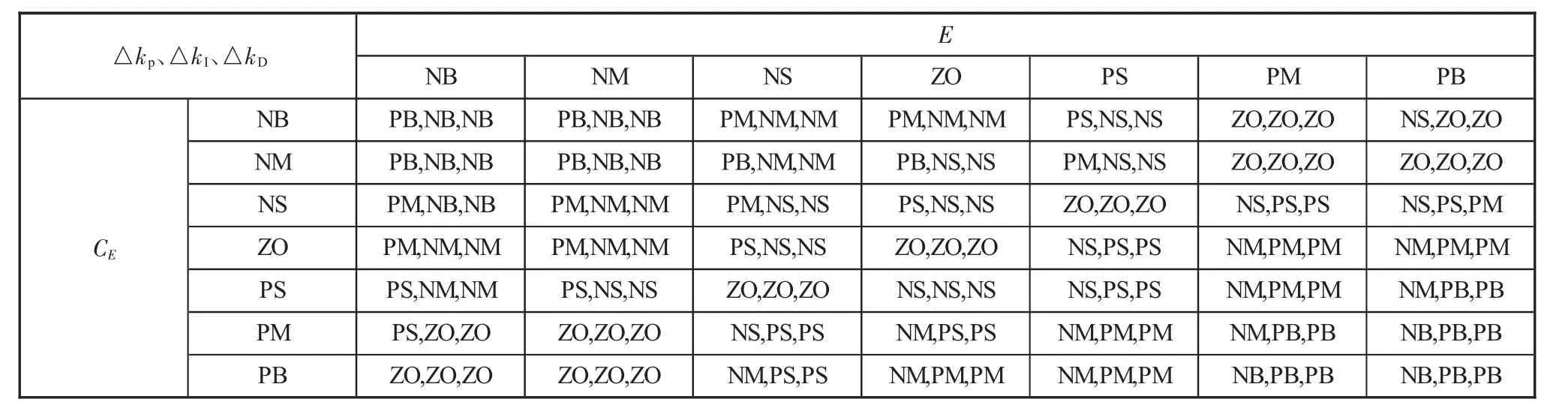
表1 模糊控制表
3.5 模糊推理与反模糊化
模糊推理首先需要知道控制规则的同时,还需要有能够通过输入量的模糊集合推导出输出量的模糊集合。模糊推理规则常用有这两种方法分别为Mamdani操作法和Larsen乘积操作法。Larsen推理法特点是以所有输入变量带来的影响为考虑对象,不是以主要的输入变量带来的影响为对象,没有必要通过复杂数学计算来完成合成推导,因此本文将采取Mamdani推理法。Mamdani推理法是通过最大、最小之间的关系合成来进行推理。
经过模糊推理算法得到的模糊矢量输出量,是无法直接对被控对象进行控制的,只有当获取精确量的转化后才能为执行机构所用,这个过程就是反模糊化过程。反模糊化与模糊化相背,求出模糊量能体现其精确值的过程,这就是精确化。解模糊算法中最常用的算法包括重心法、最大隶属度法以及取中位数法等等。
因为重心法考虑了全部的模糊量的信息,容易执行运算、使用方便,与最大隶属度法做比较的话,重前者具有更好的平滑性。故本论文的模糊化方法选重心法,由式(5)逐一计算出模糊自适应控制器对应在采煤机记忆调高系统中的输出的精确值ΔkP、ΔkI、ΔkD,去计算结果 ΔkP、ΔkI、ΔkD代入公式(1)进行在线参数调整,获得 PID 参数值 kP、kI、kD,滚筒高度实时控制得以实现。
重心法:以横坐标与模糊隶属度函数曲线围成图形的面积的重心当作最终输出值,如公式(5)所示。
式(5)中:μi(ui)为代表输出模糊集中的第i个元素隶属度值;μi为输出模糊集中的第i个隶属度函数的权重值。
4 结论
1)以采煤机的滚筒高度为控制目标,以液压油缸调节作为主要控制方法来完成采煤机的自动截割;
2)结合采煤机记忆截割系统的工作方式和特点,选择使用非线性控制的方法来实现自适应截割控制;
3)结合PID控制和模糊控制的原则,采取在线修改PID参数的策略进行设计。