三维激光扫描技术在新疆黄土坡铜锌矿井下采空区实测中的应用
2018-10-23党明智
党明智
(新疆西拓矿业有限公司,新疆 哈密 839000)
1 前言
三维激光扫描技术是继GPS技术与全站仪之后,又一项应用于测绘领域的先进手段和技术,是一种基于空间点阵扫描技术和激光无反射棱镜长距离快速测距技术[1]。该方法是通过发射激光来扫描获取被测物体表面三维坐标和反射光强度[2]。因此,该方法又被称作“实景复制技术”[3]。与传统的测量方法相比,三维激光扫描技术以单色性、方向性、相干性和高亮度等特性在精度、速度、易操作性等方面具有无可比拟的优势。目前,三维激光扫描技术已经广泛应用于包括建筑物建档、施工监测、逆向工程、矿山测量、隧洞开挖、高陡边坡等领域。
2 三维激光扫描定位原理
三维激光扫描系统的工作过程就是不断重复的采集、处理数据。并通过具有一定分辨率的空间点组成的点云图来表达目标对象的采样结果[4]。其扫描坐标系中X轴、Y轴、Z轴、原点的定义如图1所示[5]。
对于某个采集点P0,测得原点到该被测点的距离为S,扫描仪测得的水平和竖直扫描角度分别为α和β,则
该采样点的坐标P0(X,Y,Z)分别由下式求出[6]:xP0=Scosθcosα
(1)
yP0=Scosθsinα
(2)
zP0=Ssinθ
(3)

图1 三维激光扫描坐标系
3 工程实测
新疆黄土坡铜锌矿自2010年3月起开展开采方案设计及基建工作,2014年年底之前,矿山完成了首采中段上部2个分段(290m和280m)的崩落法采场,以及310m水平之上少量空场法采场的开采工作,但因各种原因生产中没有按设计要求对300m之上的矿岩进行集中放顶,井下形成了较大规模的采空区。由于采空区使周边岩石的重力重新分布,导致岩石破坏、变形和移动,不仅成为严重的安全隐患,而且对环境也造成巨大的破坏[7],而且采空区具有隐伏性强、空间分布特征规律性差、采空区顶板冒落塌陷情况难以预测等特点,必须对采空区的位置、埋深、现状、分布情况进行测量。根据现场测量条件,采用美国FARO三维激光扫描仪进行空区实测。
3.1 现场测试
现场实测历时2d,共架设站点63站,其中280m中段11站,290m中段40站,310m中段12站。各中段站点布置如图2~图4所示(其中深色为空区最大轮廓线,点为架站位置)。最终测得数据点498 861 650个,其构成南北部两个空区。
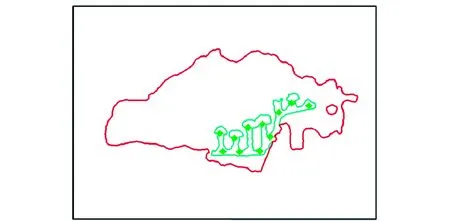
图2 280m分段站点位置布置图
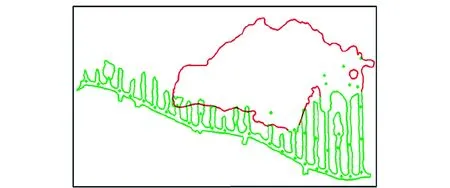
图3 290m分段站点位置布置图

图4 310m分段站点位置布置图
3.2 FARO测量方法
测量距离:扫描仪利用激光的反射测量其距离,可以达到毫米级。测量垂直角:在扫描过程中,利用编码方式在测量距离的同时可以得出垂直角。测量水平角:在扫描过程中,利用编码方式在测量距离的同时可以得出水平角。
三维坐标计算:距离、水平角和竖直角可以组成一个极坐标(δ,α,β), 然后转换成直角坐标(x,y,z),参照三维激光扫描定位原理。
4 测量数据的处理与空区模型构建
利用FARO三维激光扫描仪获得的点云数据构建实体三维几何模型时,不同应用对象、不同点云数据特征采集数据的处理方法也不尽相同。测量数据采用SCENE、GEOMAGIC和DIMINE软件联合进行处理。
4.1 点云数据的预处理
数据预处理为模型的构建提供了可靠精选的点云数据,降低了模型构建的重复度,提高了模型构建的效率和精确度[8]。数据预处理包括滤波、点云数据的简化、点云分解等步骤[9]。SCENE软件主要进行坐标计算与矫正、数据抽稀、合并等预处理工作。
4.2 实体三维几何模型构建
主要对预处理后的空间离散点云数据进行三角网化三维建模。图5为处理后的三维模型。

图5 黄土坡铜锌矿实测巷道和空区三维模型
由图5可以看出,280m分段站点和290m分段站点所测得空区为同一个空区。该空区位于矿床南部厚大部分,平面上分布于290m分段37#~69#进路之间。
310m分段站点本分段最北端有4站揭露了空区,位于矿床北部,平面上分布于290m分段5#~19#进路之间。
5 结论
在现场空虚实测获得大量关于空区的资料之后,项目组进行了全面细致繁琐的数据处理和分析,得到如下结论。
(1)最终现场实测空区分南北两个,南部空区位于矿床最南部厚大部分,平面上对应于290m分段37#~69#进路之间,北部空区平面上对应于290m分段5#~19#进路之间。
(2)两个空区之间和北部空区以北因进路堵死或进路口附近存窿体较高,人员无法进入,不能进行实测。但根据现场实际和扫描获得的两个空区的情况分析,未测区段若存在空区,其状态应与实测空区类似,内部堆积有缓冲垫层。
