基于飞行基本动作对复杂动作识别方法研究
2018-10-23王玉伟
王玉伟 高 永
(海军航空大学 烟台 264001)
1 引言
数据表明,飞行器操控人员在复杂天气下决策失误,或操作不规范是引起飞行事故的一个重要原因。飞行操控是一个特殊的技能,飞行训练是获取、保持和提高飞行技术的唯一途径,也是保证飞行安全的重要基础。当前世界上,无论是有人机还是无人机,飞行训练评估都已成为了全世界飞行训练行业的难点之一,飞行训练质量评估已经成为世界训练支持技术的热点[1]。传统的飞行训练质量管理办法是手工完成训练过程中的数据收集和分析,通过人工主观评估训练过程中的问题[6~8]。人工分析方法只能处理一个飞行架次的飞机,对日常大量的飞行数据无效,人工监控每一次数据回放花费大量时间,效率低下,分析准确度不高,主观性强[7]。所以研究一种使用计算机自动完成训练质量评价的方法迫在眉睫。显然,要实现飞行质量评价系统,自动识别出对应飞行动作为首要前提。
针对动作识别,国内外学者对此展开了大量的研究,特别是支持向量机和神经网络这个两种方法,文献[2~3]和文献[4~5]分别对此进行了研究并取得了一定成果。然而从工程角度分析这两种方法,可以发现存在以下不足:
1)支持向量机和神经网络需要大量数据样本进行训练,样本必须是单独动作的时间段,样本获取难度大。
2)支持向量机和神经网络难以利用数据特征之外的专家经验知识。如半滚倒转、水平横滚都是固定编排的动作,在飞行教范中对动作都有具体的规定。专家在识别过程中事先掌握了这些经验,结合实际飞行数据就能快速准确地识别出动作。
3)神经网络的权值矩阵的物理概念不明确。当其动作识别出现错误时,权值矩阵不能根据物理意义直接调整,只能通过网络重新学习[12]。
4)支持向量机的核函数及参数选取有很多方法,如:粒子群算法、遗传算法等[11]。但确定哪一种方法合适目前只能靠领域经验或者大量实验证明,带有一定随意性。
鉴于以上方法缺点,本文提出了一种基于基本动作对复杂动作进行识别的方法。在深入分析了飞行教范中复杂动作参数变化特征后,结合领域专家经验知识和划分易用性原则,可将复杂动作概括为5个基本动作:平飞、上升、下滑、转弯、横滚。所有复杂动作都可以通过这些基本动作在时间空间上的相互组合形成,所以可以把识别飞行动作分为三步来完成:第一步即要准确识别出基本动作时间序列,第二步根据基本动作的组成结构和先后顺序判断出复杂动作时间序列,第三步根据复杂动作过程中参数累加变化量对第二步识别的时间进行细化。
2 基本动作识别参数范围
表1所列数值为判断基本动作类的开始和结束条件提供了依据。然而识别复杂动作,需要根据飞行大纲,进一步判断基本动作在空间上的组成结构和时间序列上的先后顺序。
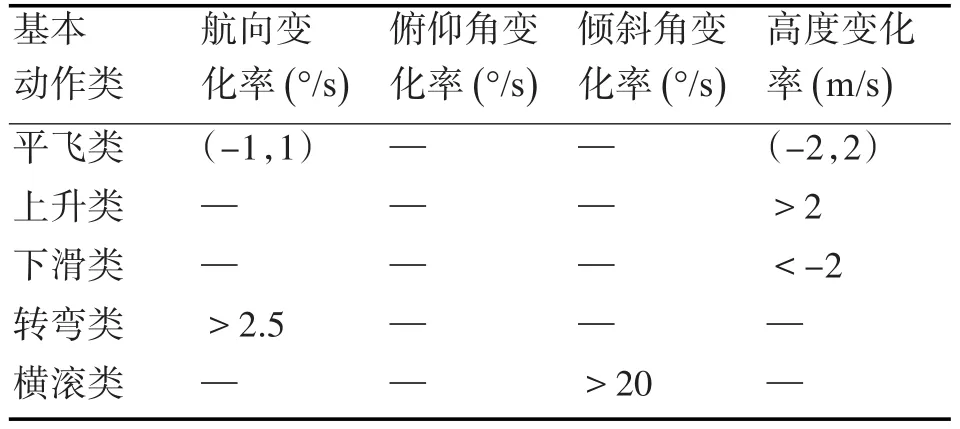
表1 基本动作参数特征
表2为各个复杂动作的飞行过程表现形式,以及基本动作构成复杂动作的组合顺序。然而根据上述两个表的条件只能粗略地识别出复杂动作的时间段,相似的动作容易发生错误识别,所以准确判断一个复杂动作还要参考飞行参数在飞行过程中的累加变化量,变化范围以及其它条件限制。例如倒转和水平横滚,它们的基本动作组合都是平飞横滚,但倒转动作是横滚半周,水平横滚动作是横滚一周。
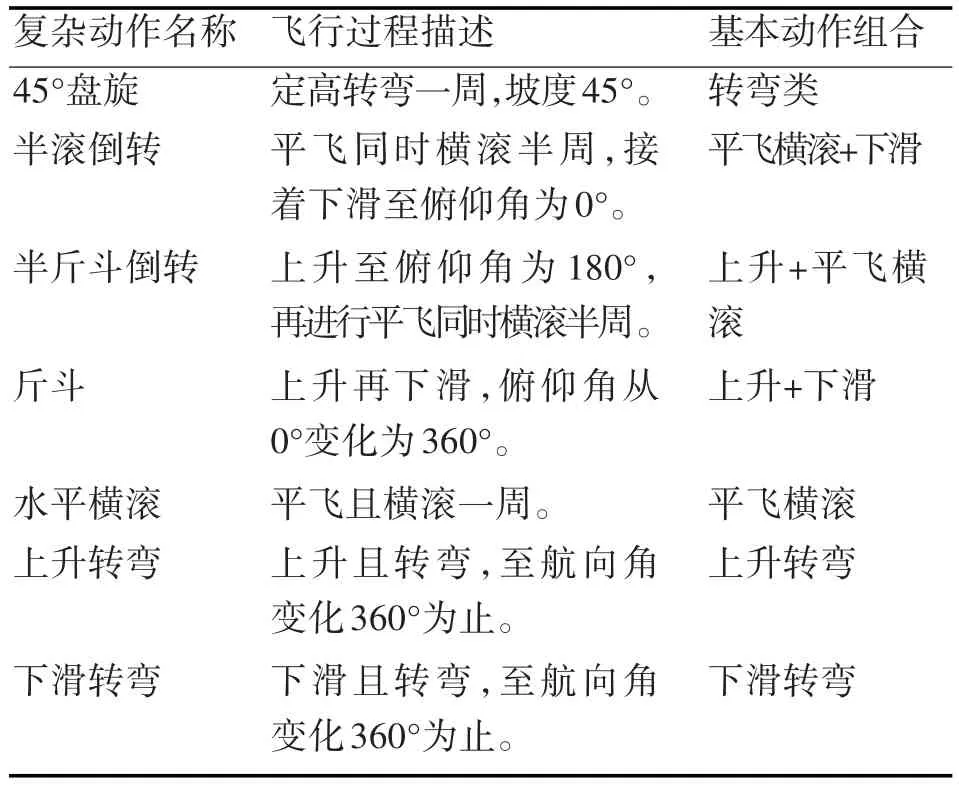
表2 复杂动作分解成基本动作
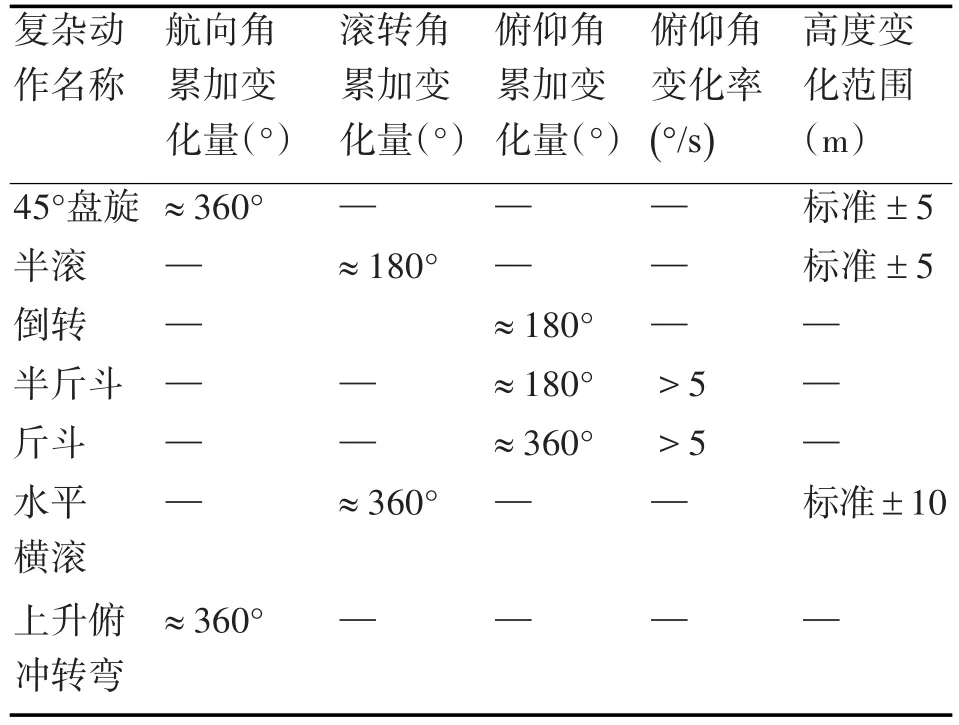
表3 复杂动作过程参数累加变化量
3 飞行动作识别知识库建立
在动作识别知识库中,任意一种动作都可以用知识规则进行表达,编成译码输入Matlab进行识别。
下面以水平横滚为例,说明飞行动作知识库的建立过程。定义下列变量和符号:
“Roll”为滚转角,“Roll1”为滚转角变化量绝对值,“Roll2”为滚转角变化率绝对值,“SgmRoll”为滚转角变化量累加,“Yaw”为航向角,“Yaw1”为航向角变化率,“Yaw2”为航向角变化率绝对值,“SgmYaw”为航向角变化量累加,“Pitch”为俯仰角,“Alt”为高度,“Alt1”为高度变化率,Startsszw 为上升转弯开始,Endsszw为上升转弯结束,Startsphg为水平横滚开始,Endsphg为水平横滚结束,*为逻辑与;T为持续时间。
1)水平横滚中的平飞基本动作
IF-15<Pitch<15*-2<Alt1<2*-1<Yaw1<1*T>1,
THEN Pingfei=1;(平飞动作成立)
2)水平横滚中的横滚基本动作
IF Roll2>20,THEN Henggun=1;(横滚动作成立)
3)组合并细化时间
IF Pingfei=1*Henggun=1,THEN Startsphg=1;
IF Startsphg=1,THEN SgmRoll=0,SgmRoll=SgmRoll+Roll1;
(Roll1为水平横滚开始后,每次间隔0.5s的滚转角变化量绝对值)
WHEN 350<SgmRoll<370,Endsphg=1;(水平横滚动作完成)
该方法的优点:充分利用专家知识经验,规则简单修改方便,识别不同种类或性能的飞机做出的动作只需要根据实际情况更改相应的参数阈值即可。
4 基于知识库的飞行动作识别过程
建立完动作识别知识库后,将其编译成Matlab能够识别的算法规则,然后将飞参数据带入进行识别。具体流程如下图1所示。
由于飞机在数据采集过程中会有不可避免的环境因素干扰,造成测量误差,会对动作识别精确度产生较大影响[8]。所以首先将飞参数据进行预处理,主要进行了野值剔除以及曲线平滑工作,然后利用知识库编译的规则进行识别,将识别的动作名称与其时间段进行保存,方便校验动作识别的正确性。
5 仿真实验及结果分析
以某型无人机×年×月×日第×架次飞行数据为例来识别。
任务规划:滑跑起飞,上升转弯到Home点60m高度,半斤斗倒转到100m到达1号航迹点,水平转弯,平飞至2号点,水平转弯,水平横滚,平飞至3号点,水平转弯,斤斗,到达4号点进行半滚倒转,到达Home点盘旋一周,下滑转弯,任务结束。

图1 动作识别过程
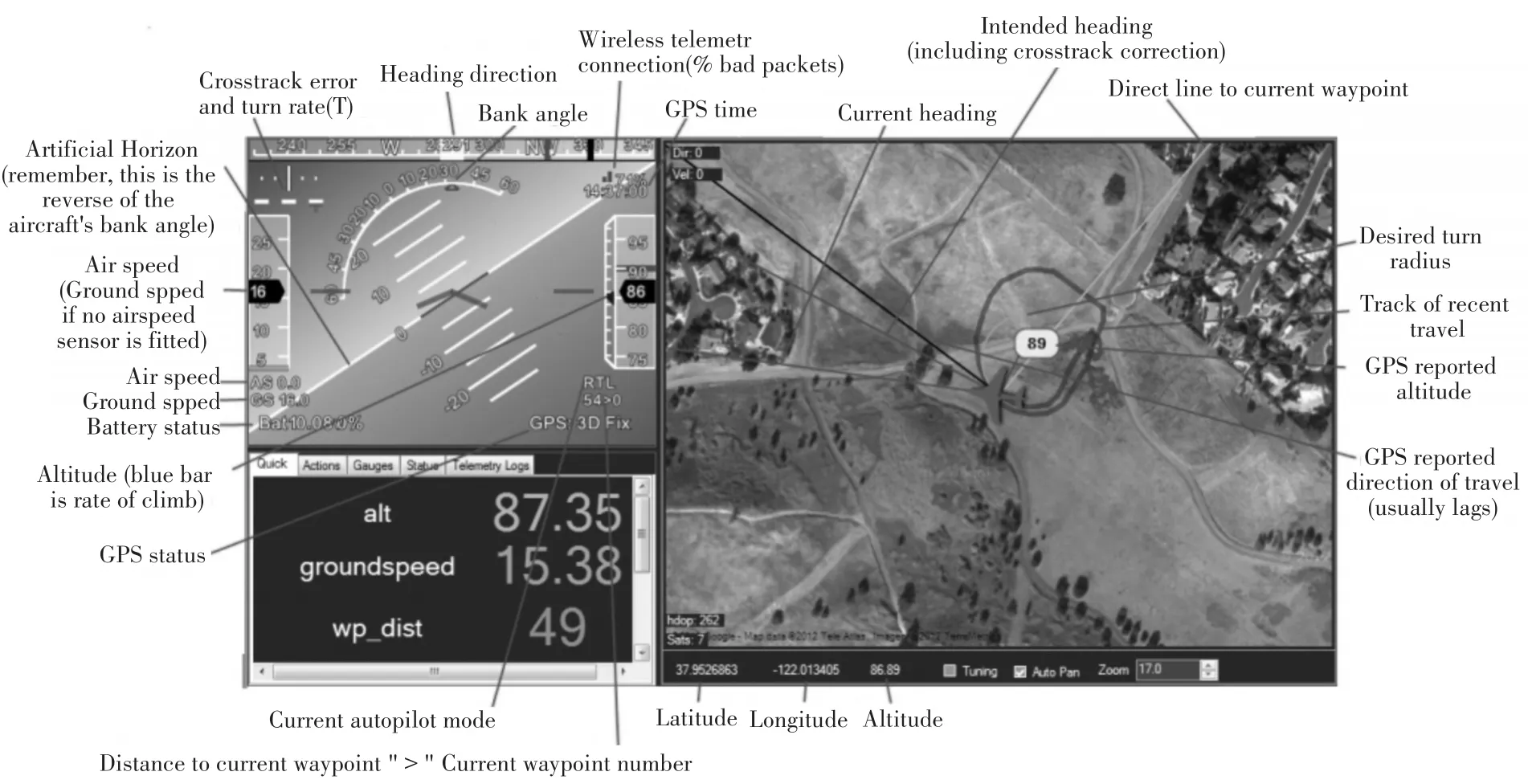
图2 地面站界面
依托Mission Planner地面站进行任务航迹设定,随着航迹的变化,各个参数及对应时间如图2所示。
由表4可以看出,地面站规划的动作及时间结果,和本文方法识别的动作,无论是动作种类还是时间段,正确率都很高,验证了本文基于基本动作组合识别复杂动作的方法是有效的。

表4 识别结果对比
除此之外,还利用此方法对其他架次的飞参数据进行了处理识别,总结发现简单仪表和简单特技的识别效果最高,识别率都处于95%以上,复杂特技识别率在90%左右,时间段误差不超过4s。不能达到100%识别率主要因为识别效果与飞行当天天气环境、操控手水平高低以及数据预处理好坏等因素有关,上述因素好坏决定了它们的飞行参数变化是否接近于正常动作的阈值范围。复杂特技识别率稍低一点原因在于复杂特技科目动作更接近实战,动作标准化程度难,不能保证每次特技飞行参数变化达到典型。
6 结语
本文深入分析了飞机日常训练科目中机动动作飞行特点,提出了所有复杂动作可以基于飞行基本动作来识别的思想,结合基本动作参数变化表,基本动作组合识别复杂动作表,复杂动作过程参数累加变化量表,建立了飞行动作识别知识库,实现了对所有动作地准确,快速识别。该方法的优点一是充分利用了专家经验知识,知识库规则物理概念清晰,结合实际情况可以添加规则,识别率会大幅度提高;二是针对于不同种类型的飞机动作识别,只需改变相应参数阈值范围,使用方便;三是根据基本动作的组成情况,可以了解复杂动作的整个过程,评价一个复杂动作看其基本动作组合完成情况即可,分析方便,为实现飞行质量评估打下坚实基础。
