一种无人驾驶汽车差动转向路径跟踪控制器研究
2018-10-23何文锋
何文锋
(咸阳职业技术学院 咸阳 712000)
1 引言
近年来,无人驾驶车辆在军事、农业以及太空探索等领域得到了广泛应用,其已经成为了国内外学者研究的热点[1~3]。与此同时,电动汽车近数十年来在节能减排、燃油经济性以及能源安全方面的优势越来越突出。总所周知的是四轮独立驱动电动汽车可以极大地提高车辆的操纵稳定性[4]。因此,研究四轮独立驱动无人驾驶车辆具有重大的理论和实际意义。
四轮独立驱动无人驾驶车辆的四个车轮独立可控,通过控制左右轮的驱动力差可以产生额外的横摆力矩,可以有效地改善横摆运动控制性能[5]。同时,所产生的横摆力矩可以迫使车轮绕着各自的主销转动,这一转向方式被称为差动转向。文献[6]利用左右独立驱动电动轮的驱动力矩差进行转向助力,并对差动助力转向的可行性和路感保持进行了较深入的研究,能够有效地减小驾驶员的转向手力。虽然差动驱动产生于差动驱动电动汽车的左右前轮,但其主要应用差动驱动进行助力转向。事实上,差动转向可以作为车辆的唯一转向方式。文献[7]研究了在主动转向出现故障时基于差动转向的轮毂电机驱动电动汽车的横摆控制问题,可以很好地保持车辆的操纵稳定性。本文主要研究基于差动转向机制的四轮独立驱动无人驾驶车辆的路径跟踪问题,在完成路径跟踪任务的同时保证车辆的稳定性。
2 路径跟踪及车辆动力学模型
2.1 路径跟踪模型
本文主要研究独立驱动电动汽车的路径跟踪问题,通过不断减小车辆与期望路径之间的侧向误差以及航向角误差完成路径跟踪任务。轨迹跟踪模型如图1所示,车辆的侧向误差和航向误差可以表示如下[8]:

其中,e表示侧向误差,即车辆质心与路径上最近点的距离。ψ表示车辆与期望路径的航向误差。ρ(σ)表示车辆质心与路径上最近点的曲率,与该点距起点的弧长有关。基于路径跟踪模型设计期望的横摆角速度,其可表示为


图1 轨迹跟踪模型
2.2 基于差动转向的车辆动力学模型
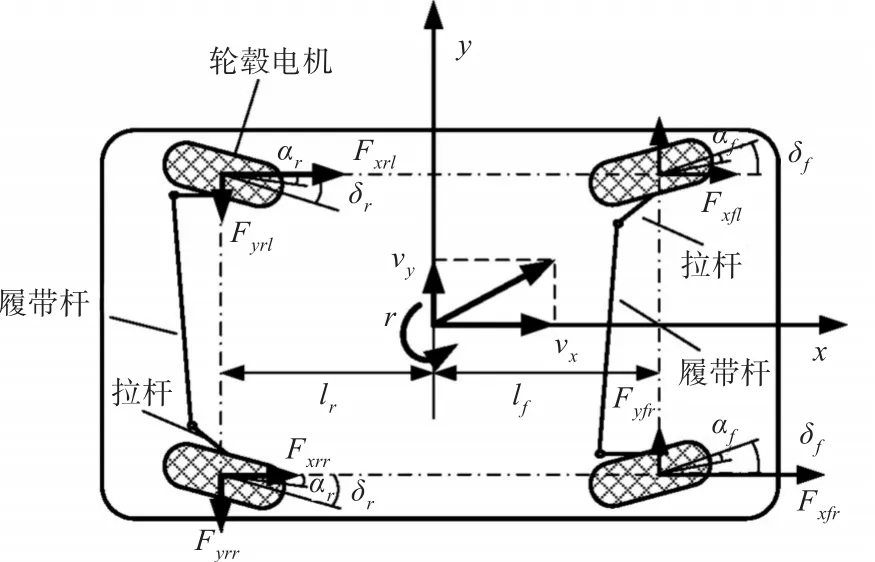
图2 基于差动转向的车辆动力学模型
基于差动转向的车辆动力学模型如图2所示,以车辆的质心(CG)为坐标原点,x轴正向指向车辆水平向前方向,y轴正向指向车辆的左侧,z轴正方向朝上。 Fxij和 Fyij,(i∈{f,r} 且 j∈{l,r})分别表示车身坐标系下x轴和 y轴方向的轮胎力。Iz和m分别表示车辆绕z轴的转动惯量和质量,lf和lr分别表示车辆质心到前后轴的距离。车辆动力学方程如下:

其中,ΔMf为前轴左右两轮驱动力矩差所产生的额外的横摆力矩。ΔMf可以由以下公式计算:

轮胎力Fxij和Fyij可以通过非线性刷子轮胎模型[9]计算得到,rσ为主销偏移距。
简化的转向系统的动力学模型如下:

将车辆动力学模型写成一下紧凑形式:

3 路径跟踪控制器设计
本节介绍应用所建立的车辆动力学模型来设计路径跟踪的模型预测控制器。首先将所建立的动力学模型在每一个采样点进行线性化离散化处理,得到线性时变预测模型[10]。线性时变模型可以在有效地降低模型预测控制计算量的同时保证较高的控制效果[11]。通过这个预测模型预测未来一段时间内的系统状态。考虑输入量和系统状态量的约束,求解目标函数得到控制时域内的期望输入序列,但只有第一个元素被输入到被控对象中[12]。下一个时刻,重复以上过程直到控制任务完成。模型预测算法作为一种连续在线优化算法,在每一个采样点求解一下带约束的优化问题:

使得
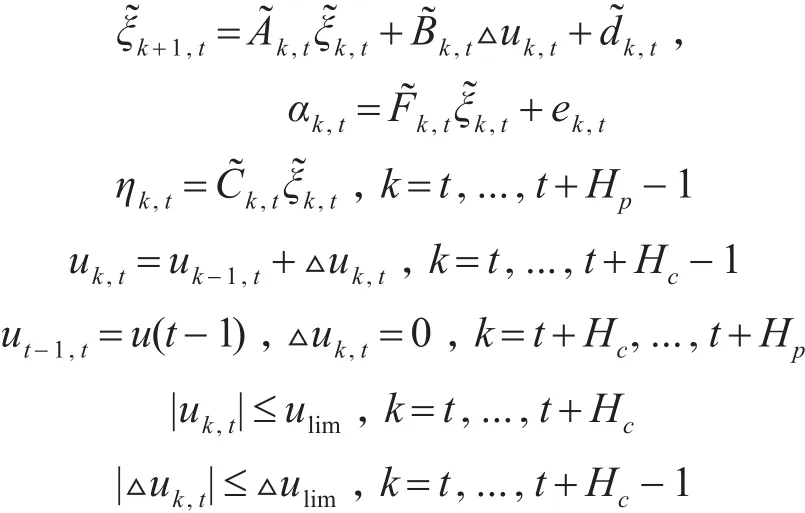
通过将以上问题转化成二次规划问题,求解得到下一时刻的控制输入u(t)。优化问题中考虑了横摆角速度r以及轮胎侧偏角α的约束保证车辆的稳定性,以及输入量u及其变化量△u的物理约束。ε为松弛因子,确保优化问题有解。
4 仿真分析
本节通过仿真验证差动转向的可行性以及路径跟踪控制器的有效性。仿真的工况为S-turn,车速保持在30m/s,轮胎与地面的摩擦系数为0.8。路径跟踪的结果如图3所示,模型预测控制器可以很好的跟踪上预先定义的期望路径。其侧向误差和航向误差如图4所示,由图可知,车辆的侧向误差以及航向误差都能够保持在安全的范围内,有效地保证了无人驾驶车路径跟踪时的安全性。
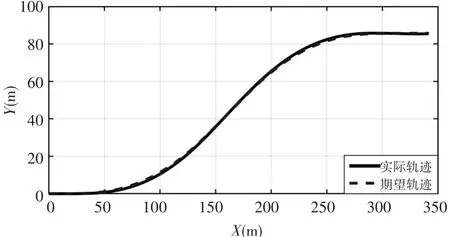
图3 路径跟踪结果

图4 侧向误差和航向误差
由控制器计算得到的控制输入,即差动力矩如图5所示。图6为差动力矩作用于转向系统从而使车轮产生的转向角。由图所示,差动力矩和转向角都在合理范围内。图7为车辆的横摆角速度以及质心侧偏角。质心侧偏角的值很小,在度范围内,保证了车辆的侧向稳定性。
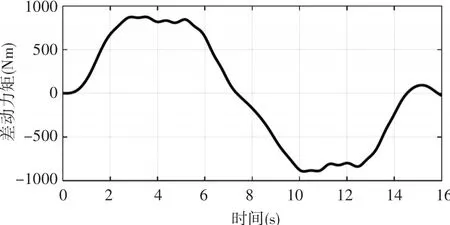
图5 差动力矩
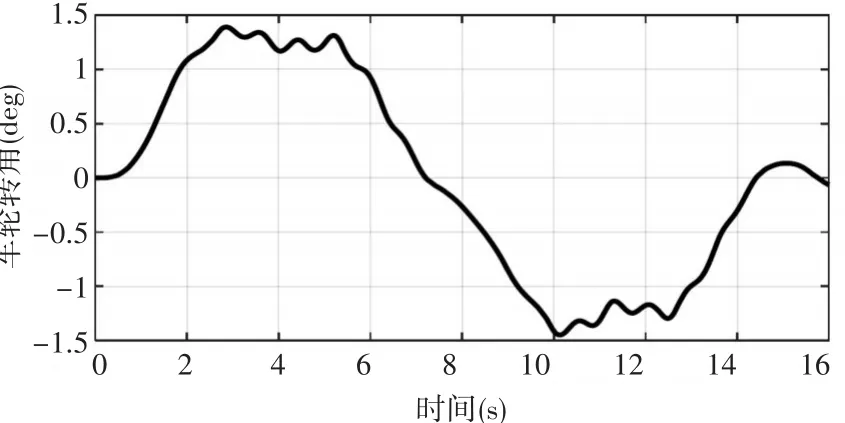
图6 车轮转向角
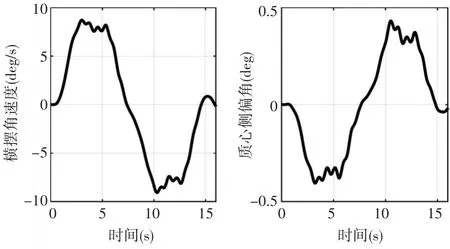
图7 横摆角度和质心侧偏角
5 结语
本文建立了路径跟踪以及基于差动转向的车辆动力学模型,研究了基于差动转向的无人驾驶车辆的路径跟踪控制。利用模型预测控制设计了路径跟踪控制器,能够在完成路径跟踪任务的同时确保车辆的操纵稳定性。通过CarSim-Simulink联合仿真可以验证差动转向的可行性以及路径跟踪控制器的有效性。
