基于提升线导鱼雷捕获概率的导引方法优化研究
2018-10-23曲丰张仪吴磊
曲丰张仪吴磊
(91388部队 湛江 524022)
1 引言
在未来海战中,鱼雷将是反潜作战的最主要武器,也仍是潜艇的主战武器之一,对隐蔽攻击水面舰船,破坏海上交通运输将发挥巨大作用。随着鱼雷技术的不断发展和提高,大大扩大了打击范围和命中精度,从而进一步强化了鱼雷在现代海战中的地位。现在大型鱼雷几乎无一例外地运用了线导技术[1]。目前世界各国在役鱼雷中,线导鱼雷型号占总数的60%以上,而且还有把线导技术移植到小型鱼雷上的趋势。因此,对线导鱼雷使用问题的研究具有现实意义[2]。本文研究成果使得学习者能够掌握线导鱼雷的作战使用的基本原理与方法,在鱼雷、鱼雷发射平台性能已知的情况下,能够充分考虑武器装备性能,合理使用线导鱼雷,充分发挥线导鱼雷的性能,提高线导鱼雷的捕获概率,达到应有的作战效果[3]。
2 导引线导鱼雷理论基础
2.1 线导鱼雷定义及导引原理
线导鱼雷是在声自导鱼雷或尾流自导鱼雷的基础上,通过在鱼雷与潜艇指控系统之间增设控制导线和收、发装置而成的有线制导鱼雷[4]。当潜艇指控系统控制线导鱼雷发射出管后,可以通过与线导鱼雷间的连接导线接收鱼雷传回的遥测信息并适时向鱼雷发送导引控制指令,从而实现对鱼雷的导引控制。线导鱼雷导引是将鱼雷、导引站、目标三者构成一个闭环系统,在保证导引站隐蔽的情况下,快速地导引鱼雷接近目标,使目标进入鱼雷的自导范围[5]。线导导引方法通常分方位导引法、前置点导引法,人工导引法。
2.2 线导鱼雷射击导引工程化模型研究
线导鱼雷射击导引模型包括线导鱼雷射击模型和线导鱼雷导引模型两部分。线导鱼雷射击模型主要功能是计算鱼雷的一次转角、二次转角或断线航向角和自导开机距离三个预设定参数[6];导引模型则用于计算鱼雷航向角、二次转角或断线航向角和自导开机距离三个遥控参数,并自动计算发出鱼雷自导开机指令的时间[7]。在文中只对线导+主动声自导攻击目标舰方式及前置点导引射击模型进行研究。
2.2.1 线导鱼雷射击模型
前置点导引一次转角计算模型为[8]

式中:

无目标运动要素时,断线航向角:

自导开机距离:

其中:

有目标运动要素时,断线航向角:

自导开机距离:

2.2.2 线导鱼雷前置点导引模型
前置点导引法导引原理是根据各导引点上测量和解算的目标、鱼雷的位置、速度、航向等状态参数,求得最佳提前角,导引鱼雷按此拦截航线接近目标[8]。即若此时此刻以后鱼雷和目标都按当时得航向等速直航,则经过一定时间后,鱼雷将和目标相遇,也称拦截航迹法。为简化计算过程,只考虑水平面内的发现情况;建立大地平面坐标系,原点O为鱼雷发射点,正东为X轴,正北为Y轴。导引模型如图1所示。
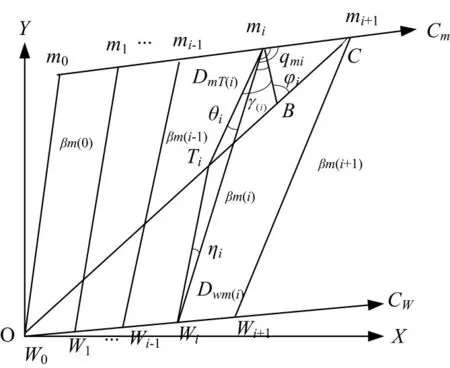
图1 前置点导引模型示意图
3 前置点导引方法优化
3.1 优化算法导引策略的提出
在鱼雷前置点射击导引模型中,鱼雷未提出攻击目标的角度范围,也就是说默认为攻击角度为0°~180°,但是查阅学习相关文献可知[9],鱼雷的攻击角度90°±60°的范围内时效果较好,即鱼雷在目标正横60°区域内主动声自导更有利于发现目标,在该范围外时捕获概率很低,因此,对于线导鱼雷,武器系统尽可能将鱼雷导引至目标正横60°区域内,然后遥控鱼雷自导开机进行搜索目标,以满足鱼雷命中角要求,提高鱼雷主动声自导捕获目标的概率。所以,武器系统可根据该范围在导引方法上进行优化,因此增加鱼雷命中角范围限制条件。
3.2 前置点优化算法原理
前置点优化算法原理:在前置点导引方法的基础上,将目标点沿垂直于目标航向下移一定的距离后,作为鱼雷的占位点。当鱼雷抵达占位点附近时,立即变向使鱼雷航向接近垂直于目标航向[10],如图2所示。
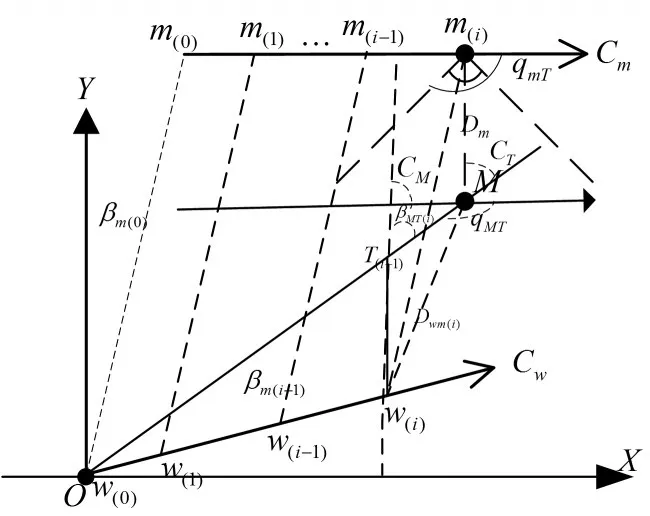
图2 前置点优化示意图
前置点优化导引通式:


当 DMT≤DK和 θ1≤qmT≤θ2时,鱼雷开始沿命中角中线转向,武器系统按照前置点导引方法计算鱼雷新的航向角。
上述公式中,Dm为鱼雷占位点与目标位置之间的距离,应不小于鱼雷主动声自导自适应距离;DK为占位距离阈值,θ1和θ2分别为占位角度范围下限和上限值。
4 仿真实验设计与结果分析
为了验证线导鱼雷前置点导引法优化对提升线导鱼雷发现目标概率概率的能力,运用统计模拟法进一步进行数学仿真,对线导+声自导鱼雷捕获水面舰船的概率进行了仿真分析[11]。
4.1 求解线导鱼雷捕获概率统计模拟法
4.1.1 线导鱼雷捕获目标判定标准
首先在设定的敌目标航行坐标数据和鱼雷轨迹数据中分别加入相应的声纳探测误差和鱼雷航行偏差。
t时刻鱼雷与目标之间的距离按公式计算为

t时刻鱼雷与目标方位线的倾角按公式计算:

鱼雷自导捕获目标判断公式为
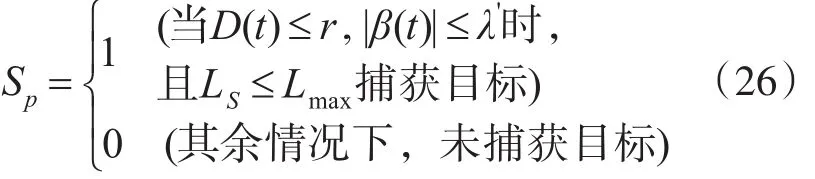
(LS为鱼雷航程,Lmax为鱼雷最大航行航程)
4.1.2 统计计算捕获概率模型
模拟统计计算步骤如下:
1)初始给定模拟试验次数n1,仿真精度为Δ;
2)按式(28)统计鱼雷自导捕获目标的概率Pα;
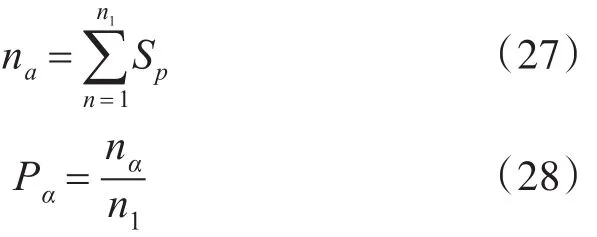
nα为鱼雷自导捕获到目标的次数。
3)按式(29)计算按精度要求的模拟次数

4)按式(30)计算继续模拟次数 Δn:

若Δn≤0,则停止模拟;
若Δn≥0,则继续模拟Δn次。
赋值

按b至d继续统计模拟计算,直到要求为止。此时的频率Pα即为声自导捕获目标的概率。
4.2 仿真案例分析
4.2.1 仿真条件
潜艇:匀速直航,航向60°,航速6节,采用分别采用前置点导引方式,修正方位导引方式,占位优化导引方式导引鱼雷进行攻击目标;
目标:水面目标,航向90°,航速18节,初始射距为8000m,初始方位30°;
鱼雷:主动声自导,航速40节,自导作用距离为1000m。
仿真参数误差:潜艇航向均方差0.5°,航速均方差0.5节;目标航向均方差1°,航速均方差1节;声纳测向误差1°;目标运动要素解算航向误差1°,航速误差1°,距离误差200m。
仿真分析在不同发射时刻目标舷角下潜艇发控线导鱼雷攻击水面目标的命中角情况,若命中角满足鱼雷要求,则不进行优化;若命中角不满足鱼雷要求,则进行优化。仿真结果如表1所示。
4.2.2 仿真过程
运用前置点导引法和前置点优化占位法的运动学模型编写仿真软件,设定初始仿真次数为1000次,仿真精度90%。仿真分析在不同目标舷角下潜艇发控某型线导鱼雷攻击水面目标的命中角情况,若命中角满足鱼雷最优命中角范围要求,则不使用前置点优化占位算法;若命中角不满足鱼雷最优命中角范围要求,则使用前置点优化算法发控鱼雷攻击目标[12]。线导鱼雷导引仿真软件界面及部分仿真态势如图3、图4所示。
图3 前置点导引法仿真界面

图4 前置点优化法仿真界面
4.2.3 仿真结果分析
仿真结果如表1所示;由上述仿真结果分析可知,在大舷角或小舷角攻击态势下,武器系统发控线导鱼雷以主动声自导方式攻击目标时,使用攻击占位算法后的鱼雷命中角,与未使用攻击占位算法的鱼雷命中角相比更接近与90°附近,同时鱼雷捕获目标的概率有较大提升。
表1 仿真计算结果
5 结语
本文对线导鱼雷导引方法进行了优化,在线导鱼雷的置点导引方法及提出占位优化算法的基础上,运用统计模拟法进行数学仿真,运用Matlab语言编写仿真软件,对线导+声自导鱼雷捕获水面舰船的概率进行了仿真分析,通过两种不同导引方法的仿真计算结果的对比,验证线导鱼雷占位优化对提升线导鱼雷捕获目标概率概率的能力,进而也验证了优化方法的正确性与可行性。也为后续的研究与推广使用奠定了基础。
