基于径向基神经网络的侦察目标意图识别研究
2018-10-23王公宝
魏 蔚 王公宝
(海军工程大学基础部 武汉 430033)
1 引言
无人机系统(简称无人机)是指飞机平台有动力但是无人驾驶,能自主/半自主或者遥控、远距离使用、可回收或者一次性使用、可携带致命或非致命武器完成任务的装备系统[1]。随着科学技术的进步,尤其是信息科学的进步,无人机正在从过去执行一般的侦察等简单任务逐渐向执行警戒、打击乃至空战等高级军事任务发展,逐步成为重要的主战装备[2]。其中,无人机空中目标意图识别是防空作战指挥中的重要步骤,直接影响到指挥员的指挥决策[3]。在当前的防空体系中,由于受到技术的局限性,对空中目标意图的判断主要通过平时收集的敌情、上级的敌情通报或者雷达测得的情报信息进行人为分析和判断,预测得到的目标意图往往不准确、不及时,造成情报误判或延误战机[4]。
随着信息技术的进步,战场信息的感知能力逐渐提高,单纯依靠人来判断空中目标意图已经不适应现代战争的需要。利用计算机技术和智能算法进行空中目标意图的判断是当前研究的热点[5~6]。其中如何构建反应迅速、判断准确的空中目标意图识别模型是需要解决的关键问题。空中目标意图识别模型的核心问题是如何快速、准确地确定雷达探测到的目标信息与目标意图之间的关系,本质上属于模式识别问题。
本文采用径向基神经网络建立空中目标意图识别模型,运用案例库分析来训练网络模型参数,利用雷达测试数据验证了基于径向基神经网络的空中目标意图识别模型具有更高的准确性。
2 空中目标意图识别
空中目标意图可理解为目标为完成某种作战目的而采取的行动计划[6]。目标意图识别是指利用战场上的雷达等传感装置,将探测到的目标信息进行分析,进而对目标的作战设想、作战打算、作战计划等进行判断、预测或者解释[7]。空中目标意图识别是指综合空中态势、战场环境、空中目标的各种状态属性等进行分析并判断其作战企图[8],其中,空中目标的状态属性主要包括:航向、飞行速度、雷达反射面积、飞行高度、机型等[9~10]。
空中目标意图识别一般流程如图1所示。通过雷达等战场传感器获得空中目标的飞行参数,构成信息源;从信息源中提取空中目标的各种状态属性,作为特征参数;将提取出的特征参数输入到经过案例知识库训练好的目标意图识别模型中,得到目标识别结果。

图1 空中目标意图识别流程
3 径向基神经网络介绍
径向基神经网络具有收敛速度快、能够以任意精度逼近任意非线性函数、没有局部最小值、泛化能力强等优点,被广泛应用于模式识别问题中[11]。
径向基神经网络是一种包括输入层、隐藏层和输出层的前向神经网络。径向基神经网络输入层到隐藏层的映射是非线性的,而隐藏层的神经元数目确定后,隐藏层到输出层的映射是线性的[12]。假设输入向量为 X=(x1,x2,⋅ ⋅ ⋅,xj,⋅ ⋅ ⋅,xn)T,输入层到隐藏层的阈值为θi,连接权值为ωij,则输入层到隐藏层的输入为
yi=f(ui)为隐藏层的输出,其中 f(⋅)称为神经元的激励函数。径向基神经网络的激励函数通常采用高斯函数:

式中,fi(x)表示第i个隐藏层的输出;x是输入向量,ci是第i个高斯函数的中心;σi是第i个基函数的归一化因子,表示该基函数围绕中心点ci的宽度;m为隐藏层的节点个数。
4 案例分析
4.1 目标意图识别案例
在某海域执行侦察任务的无人机发现前方有12批可疑的空中目标,从t时刻起,雷达测得的目标位置信息、雷达探测面积以及目标意图见表1(表1中的数据来源于2015年全国研究生数学建模竞赛题目中的有关资料)。t时刻,无人机位置为北纬15°41′7″,东经112°42′10″,航向200°(以正北为0°,顺时针方向),航速16节(即每小时16海里)。(说明:表中作战时间为time_t格式,即从1970年1月1日0时起到某一时刻的秒数;目标位置经纬度的单位为弧度;目标高度的单位为m)。
4.2 基于径向基神经网络的目标意图识别模型
基于径向基神经网络的目标意图识别模型主要包括数据预处理、特征提取、目标意图识别三部分。基于径向基神经网络的空中目标意图识别模型如图2所示。
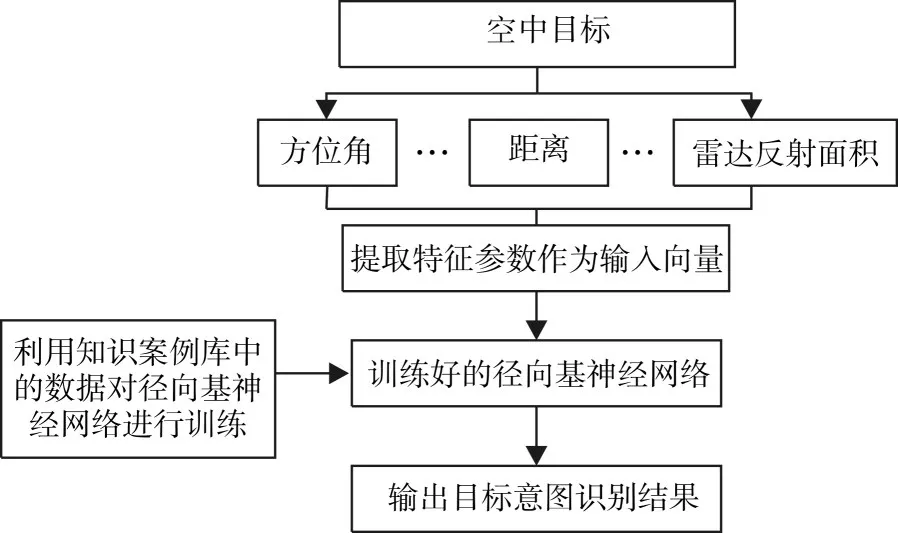
图2 空中目标意图识别模型
空中目标意图识别的具体步骤为
1)通过雷达等战场传感器获得空中目标的飞行参数,构成信息源;
2)从信息源中提取空中目标的各种状态属性,作为特征参数;
3)将提取出的特征参数输入到经过案例知识库训练好的目标意图识别模型中,得到目标识别结果。
具体方法如下:
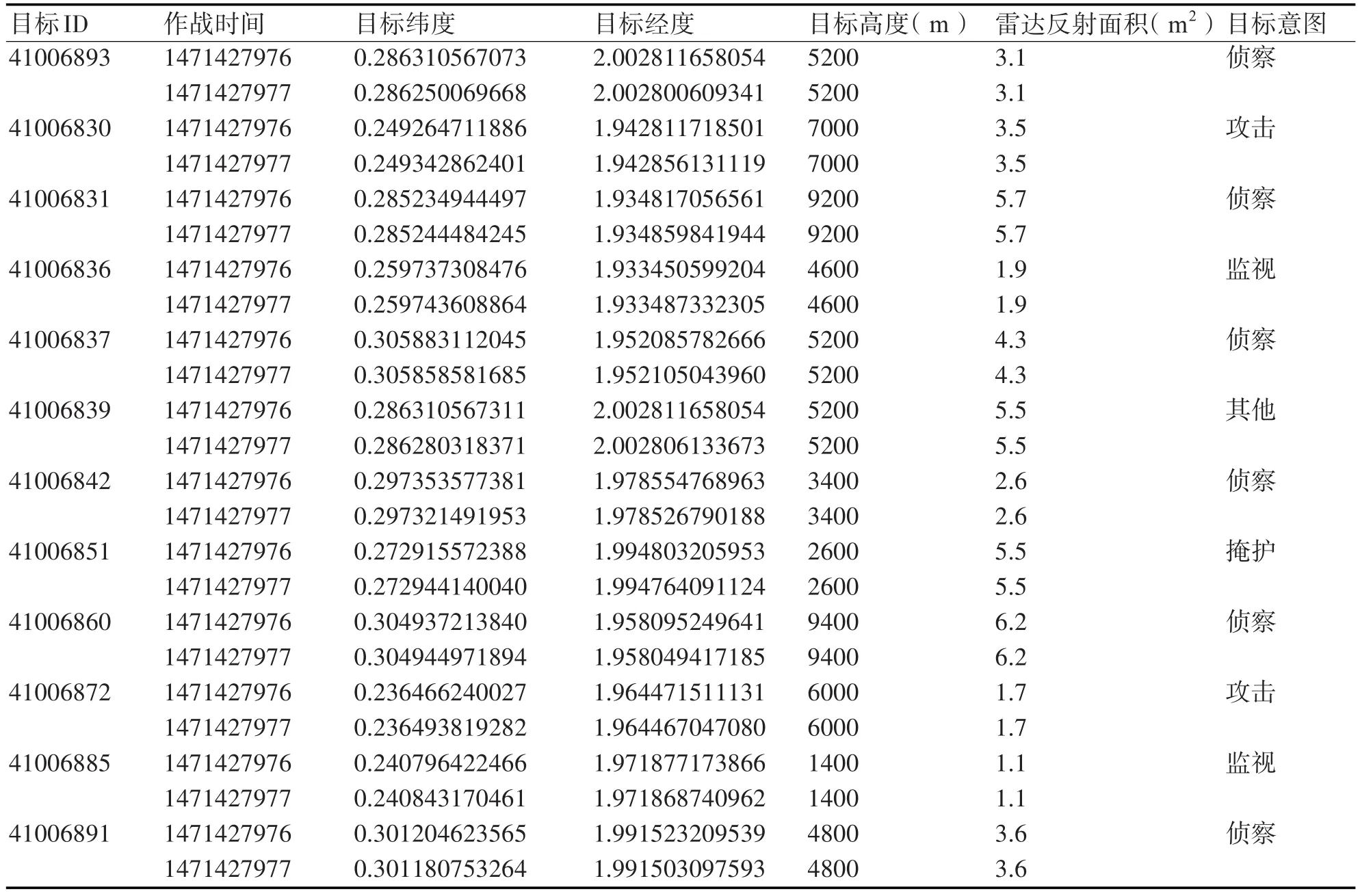
表1 雷达探测空中目标原始参数
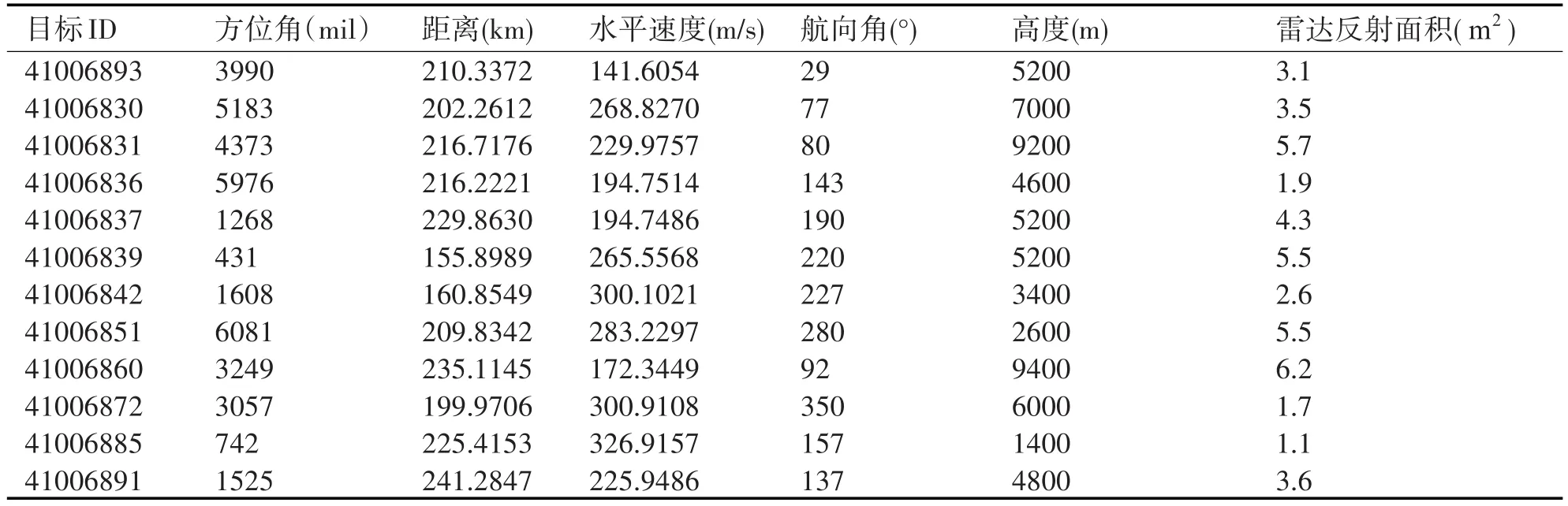
表2 数据预处理后的空中目标参数
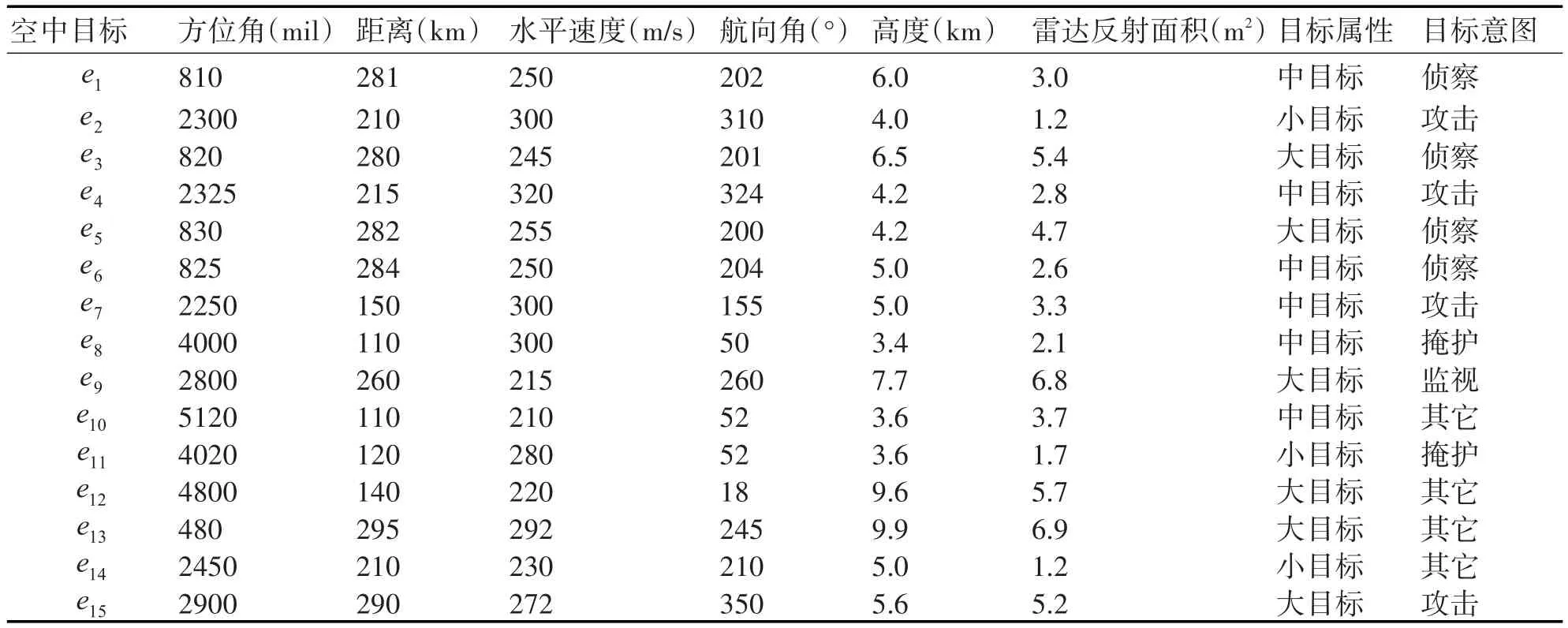
表3 案例知识库中用于网络训练的15批空中目标数据[5]

表4 径向基神经网络目标意图识别结果
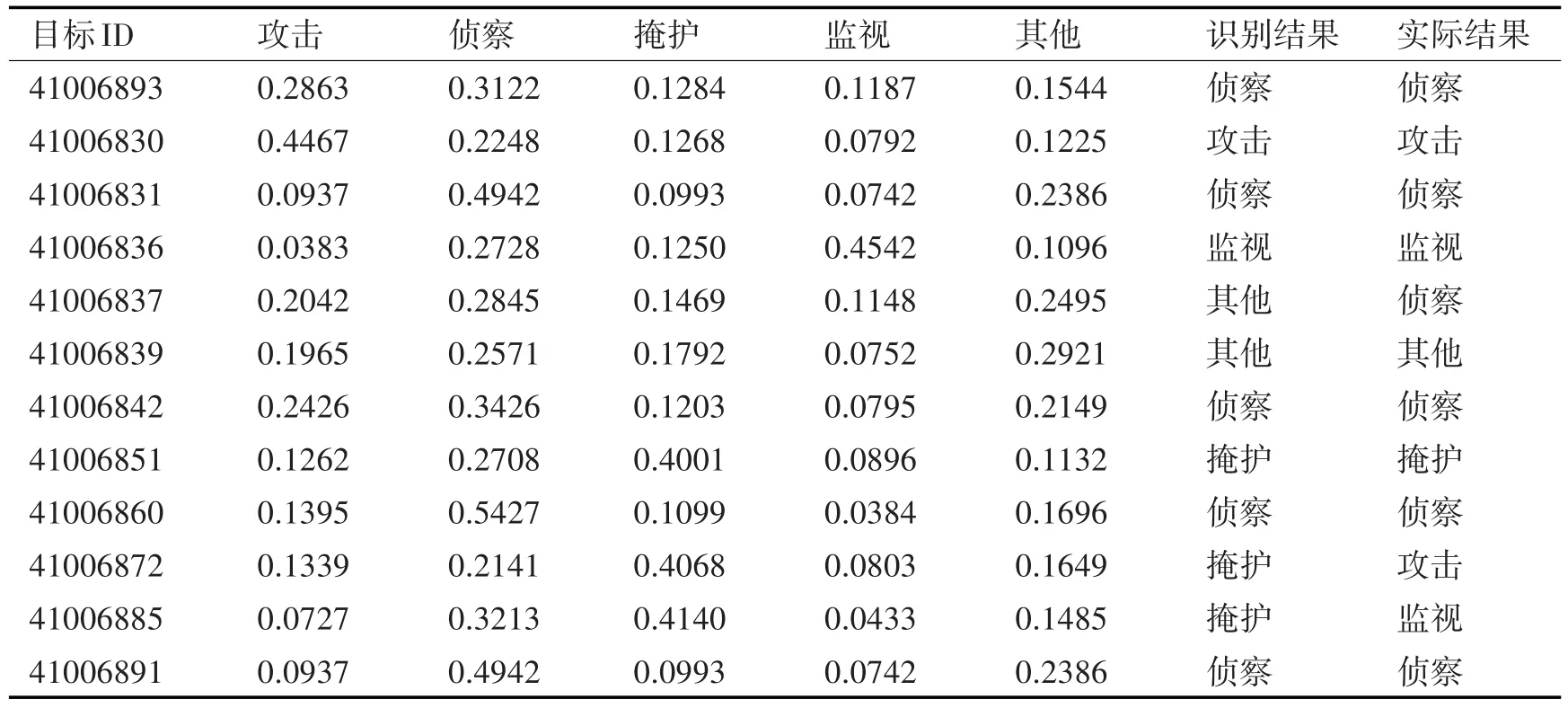
表5 BP神经网络目标意图识别结果

表6 支持向量机(SVM)目标意图识别结果
1)数据预处理。表1所给数据为发现目标的时刻、目标经纬度、目标高度以及雷达反射面积等原始参数,表1中的数据来源于2015年全国研究生数学建模竞赛题目中的有关资料。需要将其分别换算成目标距无人机的距离、方位角、速度、航向角等参数。如表2所示,表中数据为换算后的目标参数。其中,方位角 β(mil)是指从无人机到空中目标方向的方位角:正北时β=0,顺时针方向一周分为6400mil;距离D(km)是指从我指挥舰位置到空中目标的距离;水平速度V(m/s)是指空中目标在水平面上的速度;航向角θ(°)是指空中目标飞行的方向(正北为0°,顺时针方向一周分为360°);高度H(km)是指空中目标距海平面的垂直距离;雷达反射面积σ(m2)是指目标在雷达上回波的大小:0≤σ<2为小目标,2≤σ<4为中目标,σ≥4为大目标。
2)特征提取。由规则库可知,目标大小与目标意图没有直接关系,因此目标的雷达反射面积只是评价大小属性的评价标准之一,不能作为意图的评价参数。选取的目标意图识别特征参数包括:目标方位角、距离、水平速度、航向角、高度。这些识别参数构成径向基神经网络的输入向量,其中a1,a2,a3,a4,a5分别代表目标方位角、距离、水平速度、航向角、高度。
3)目标意图识别。首先,将知识和规则的样本数据作为训练数据,提取其用于判别目标意图的5个参数作为径向基神经网络的输入向量,输出向量为目标意图分别表示各目标意图为攻击、侦察、掩护、监视、其他;然后利用案例知识库中的15组训练数据(见表3)[5]对径向基神经网络进行训练;最后对测试用的12批空中目标的特征参数向量进行意图识别。径向基网络的输出为各目标意图的概率,按照隶属度最大原则得到空中目标意图,识别结果如表4所示。目标意图识别的准确性用准确率来表示:

由表4可知,基于径向基神经网络的空中目标意图识别准确率为83.3%。分别利用BP神经网络[5]和支持向量机(SVM)[8]的目标意图识别模型进行空中目标意图识别,识别结果如表5、表6所示,其准确率分别为75%和58.3%。
5 结语
本文利用径向基神经网络建立了空中目标意图识别模型。通过知识规则库对模型进行训练,将处理后的无人机侦察数据输入到训练好的径向基神经网络中,得到空中目标意图。案例分析表明,相对于BP神经网络和支持向量机的目标意图识别模型,基于径向基神经网络的空中目标意图识别模型具有更高的准确性。
