舰载多传感器协同探测资源调度模型研究
2018-10-23王彦霖王红军
王彦霖,王红军
(海军大连舰艇学院,辽宁 大连116018)
1 多传感器资源调度算法
1.1 多传感器资源调度问题描述
在日常的多传感器资源调度运行中,常常会出现以下几个方面的问题:第一,对于性能不同的传感器,其功能也不同,所适用的领域以及战斗类型都是有针对性的;第二,面临不同作战情况,其是否会受到作战环境的影响,这是能不能稳定发挥出自身性能的不确定性;第三,传感器的资源有限,这一点就限制了其功能的发挥,只能执行一定范围内的工作量,不能无限透支其功能和资源;第四,对于一些突发状况,如果其传感器在软件或是硬件等方面出现了问题,那么会直接影响作战结果[1]。我们所使用的这种单一传感器,不论是从性能还是使用效率方面,都有着很多的不足之处,其不能处理复杂情况下的探测问题,不能为作战提供更好的保障。想要在作战中取得胜利、夺取优势,就需要对传感器进行深入研究,不断地升级其系统和性能,让它能够更好地与作战相匹配,得到更大的效能[2-4]。
1.2 多传感器管理调度方法
在管理方法方面,多传感器有着很多种计算方式,每种方式针对的重点和执行步骤都不太一样。比如说,在线性规划的算法下,首先需要建立起效能函数,而这一函数的设计目的就是为了更好地进行性能的分配[5]。程荣(2007)在其硕士学位论文中对运动目标跟踪过程中传感器资源调度进行了研究,提出了α-k覆盖算法,确保目标运动区域中至少有k个传感器以至少α的概率覆盖;王红军(2007)在其博士学位论文中提出和使用克隆免疫算法及神经网络算法解决舰艇编队协同抗导资源调度问题;动态规划的算法主要采取的模式是,先进行概率的计算,然后根据这一结果进行管理操作;信息论的管理方法就是先进行信息的采集,确定目标对象之后看其动态信息,掌握其在什么时候最为活跃,然后根据此进行跟踪监测,能够获得更好的效果[6-7]。
除了上述的一些管理方法之外,随着科技的发展与进步,这些方法已经不能满足所有的作战需求,因此近几年来又出现了很多新的管理模式,更加科学智能。
在作战中,很多情况都是未知且不可控的,面对着这种复杂的环境,一般的管理方法根本不能与之适应,因此出现了模糊推理和神经网络的管理方法。它能够克服这种无法预测的弊端,让传感器不论在何种情况下都能稳定地发挥其性能,也因为这一特性,此方法受到大家的欢迎与认可。张堃、周德云、王谦(2011)根据作战阶段和目标类型,建立了基于目标类型的模糊决策树模型,对机载多传感器动态智能管理进行研究;J M Mplina Lopez、F J Jimenez Rodriguez、J R Casar Corredera(1995)采用模糊决策和基于知识推理理论构建传感器管理系统,为后续的操作打好基础[8-12]。
根据军事作战讲究反应快、准确度高的原则,本文选择成熟的线性规划作为求多传感器协同探测最优解的算法进行建模。
2 多传感器协同探测资源调度模型
2.1 舰载多传感器资源调度系统
多传感器协同,是为获得战场优势而提出的一种模式,它能够广泛地探测现场情况,通过多种技术的融合而发挥出稳定的探测性能,能够多方面、多角度地获得比较全面、准确的目标信息,是一种效率很高的探测模式。舰载多传感器资源调度系统主要功能:首先能够根据实际情况做出系统选择的判断,能够根据其情况的不同合理运用合适的传感器;其次是针对模式的选择,能够准确判断出应不应该使用协同模式进行探测;还有就是对机器状态的掌握,能够调节其内部参数以适应现场环境,找出最适合的匹配参数;最后是可以掌握其资源动态信息,以此来对机器状态做出判断,是否能够发挥出其功能作用。图1为系统功能图解。

图1 舰载多传感器协同探测资源调度系统
2.2 协同策略规划
此内容是指为了达到目的,几组传感器一起配合发挥作用的工作模式。由于作战是复杂而多变的,不可能只出现一种情况,所以面对多种复杂的情况,就需要不同的传感器发挥出其不同的职能,而每种传感器都有其各自的独特性能,所以为了让其能够充分发挥,就需要不同的传感器之间进行协同工作,即构成协同策略。下面将针对3种不同的作战情况,对其协同探测策略进行举例规划。
(1)预警探测
这种协同作业就是为了发挥出多种工作性能,以做到最好的探测效果,快速准确地获得目标的探测信息,设CY为预警探测任务的协同策略集,CY=C{ ,CY2,…,CYm1}。

表1 预警探测任务协同策略集
(2)目标识别
这一内容的目的就是为了清晰准确地辨认目标、捕捉目标,避免出现探测对象的混淆。设CS为目标识别任务的协同策略集,CS=CS1{ ,CS2,…,CSm2}。

表2 目标识别任务协同策略集
(3)目标跟踪
使系统能够稳定且持久地对目标进行监测跟踪,其所获得的信息反馈能够作为导弹定位的参考条件,设Cgz为目标跟踪任务的协同策略集,CG=CG1{ ,CG2,…,CGm3}。

表3 目标跟踪任务协同策略集
综合上述分析,能够得出最终的策略集合结果为:C={C1,C2,…,Cn},Ci∈{CY∪CS∪CG},i=1,2,…,n。
2.3 多传感器资源调度系统描述
(1)虚拟任务描述

(2)虚拟任务重要程度及排序
前面所列举的3种作战任务,在具体的作战环境中进行判断哪一种是目前最需要完成实现的,然后将任务进行先后的排序,确定其完成的先后顺序,使用专家打分法、有序比值法或模糊层次分析等方法,得出它们的重要程度结果为W=(w1,w2,w3),预警探测虚拟任务重要程度权向量分别为ρY=(ρY1,ρY2,… ,ρYE),目标识别虚拟任务重要程度权向量分别为ρS=(ρS1,ρS2,… ,ρSF),目标跟踪虚拟任务的重要程度权向量分别为ρG=,故而可得虚拟任务集合T中各虚拟任务的重要程度加权系数为:
即ρ=(ρ1,ρ2,…,ρE+F+G),然后根据加权系数大小对虚拟任务进行优先级排序。
2.4 目标函数与约束条件
(1)目标函数:其系统在运作时是以满足任务需求为目的,在传感器资源进行了科学合理的分配,达到了最好的状态时,得出其最优的协同探测结果:

式中:E(cj)代表策略cj代表所发挥的协同效益,其中涉及到多传感器协同探测效能集内容,有待进一步研究。

式中:k为传感器Ui的某种工作模式;Nki为Ui在工作模式k下的最大任务容量。
2.5 资源调度原则
资源调度原则为:
(1)首先满足重要程度的需要,先完成最重要的任务之后再完成次重要任务。
(2)资源如果有限,出现分配不足的情况,那么优先分配给更重要的任务,或者从重要程度低的任务中抽取资源满足重要程度高的任务的需要。
(3)完成任务时采取最好的协同策略,获得最高的协同效益。
2.6 资源调度算法步骤与流程
资源调度算法步骤与流程为:
(1)首先建立起当前任务集合T={T1,T2,…,TN},确定任务的重要程度值,并将其按照程度大小进排序。
(2)参考协同策略集,以此作为根据来进行资源的分配预测。
(3)参考资源分配预测,以此来评估可以完成何种任务,并且在完成任务时要选择最佳协同方式,注意对实施结果信息进行跟踪记录。
(4)分析任务的类型特性,以此作为参考选择适合的协同策略,匹配合适的传感器协同探测系统模式。
(5)如果出现了新的任务情况,要将其信息立刻输入到集合中,重新执行步骤(1)。
(6)如果任务已经完成,就要将其从集合中移除,同样重新执行步骤(1)。
(7)如果集合中没有内容,那么立刻结束资源调度计算。
3 仿真计算
3.1 参数设置
设置预警探测、目标识别、目标跟踪3种作战任务多传感器协同策略子集中各参数,详细内容可参见表4。表中,“传感器需求”若只有一个字符,如“A”则表示子任务由传感器A单独提供资源保障,若有2个字符,如“AB(0.9)”则表示子任务由传感器A与B协同提供资源保障且当A与B协同工作时对此项子任务的保障效益为0.9,如t2为需要A与B分别同时提供的资源量(即资源总量的15%)。

表4 任务参数设置
其资源分为A,B,C 3种,每种传感器资源资源总量为1,其中传感器A与B,B与C,A与C可以协同使用,以保障不同的子任务,形成协同策略集。其重要程度权重向量为W=(0.25,0.3,0.45),预警探测任务子集为TY=(t1,t2,t3),子任务的重要程度权重向量ρY=(0.35,0.25,0.40);目标识别任务子集为TS=(t1,t2),子任务重要程度权重向量ρS=(0.5,0.5);目标跟踪任务子集为TG=(t1,t2,t3),子任务重要程度权重向量ρG=(0.3,0.3,0.4)。
根据上述内容,经过计算最终可以得出以下结果,获得相应的系数参数,其数值结果如表5所示。

表5 任务重要程度加权系数
3.2 仿真结果
通过仿真计算,得到传感器A,B,C的资源调度情况,见图2~图4。

图2 传感器A在资源调度时的资源分配
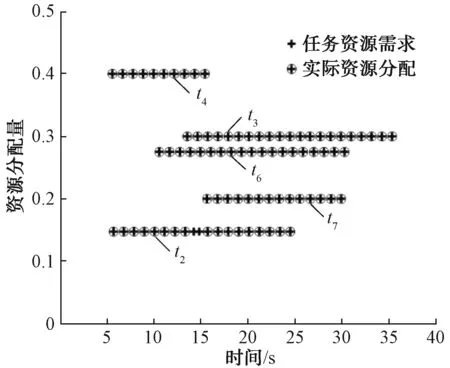
图3 传感器B资源调度时的资源分配

图4 传感器C资源调度时的资源分配
3.3 结果分析
从图2~图4的内容中可以看出,传感器A保障4个任务,t2是不完全保障;传感器B保障了5个任务,其中t2未能完全保障;传感器C保障了3个任务,所有任务完全保障到位。
由表4、表5、图2~图4可知,当t=10 s时,t5开始进行,此时需要对传感器资源进行调度,根据实际情况匹配相应的资源,这时传感器A已将资源分配给之前开始的任务t1、t2、t4,资源分配量分别为0.3、0.15、0.4,剩余资源量0.15已不满足4个任务同时保障的条件。在已分配的任务中t2任务重要程度加权系数(见表5)最小,并且低于即将到来的t5,而参考原则2中的内容,重要程度高的任务可以在资源不足的情况下,通过调取重要程度低的任务资源来满足需要,所以这时传感器A不再对t2进行资源保障,而是将这部分资源提供给t5。此时根据原则4,当传感器资源受限时,选择传感器资源不受限的协同策略中协同效益最高的协同策略,故t2选择收益低于由传感器A和B协同策略的传感器B和C的协同策略,来执行任务。于是传感器B开始在t=10 s时对t2进行资源保障,分配0.15的资源。当t=13 s时t3开始进行,首先还是需要一定的资源保障,向系统提交申请。而传感器B把资源给了之前开始的任务t2、t4、t6,分配量分别为0.15、0.4、0.28,剩余资源量0.17,已不能满足4个任务同时保障的条件。在已分配的任务中,t2任务重要程度加权系数(见表5)最小,并且低于即将到来的t3,参考上述原则2的内容可以执行操作,使传感器B不再对t2进行资源保障,而是把这部分资源对t3提供。
故从t=13 s开始,t2的策略集中没有可以对其进行资源保障的策略,任务停止。当t=15 s时,t4结束,根据“原则3”t2选定最好的协同策略来完成此项任务,因此使用传感器A、B共同完成这项任务。
4 结束语
多传感器协同探测资源调度涉及到很多内容,其中间步骤以及需要注意的事项也非常多。论文以不同的任务作为切入点进行分析,对于如何选用策略以及对协同策略集展开了一系列的研究,并进行了详细的举例,使用线性规划算法对多传感器资源调度模型进行了设计,确定了资源调度主要原则,给出了算法实现的基本步骤,并结合一种典型任务进行了仿真计算。最后通过仿真计算为舰载多传感器解决资源受限下以最大效益为基础的作战使用与资源调度问题提供了基础方法。
