遍历式最大电流点硅光电池追踪系统设计
2018-10-22薄中亚
薄中亚
(常州天为自动化科技有限公司江苏常州 213164)
0 引言
光伏能源可持续无污染总量大,是世界各国普遍关注和重点发展的新产业。光伏发电的基础是硅光电池,输出功率和光线强度成正比,实践表明采用光线跟踪的硅光电池矩阵可以提高41.34%能量的接收率[1]。
目前的跟踪系统主要是理论参数跟踪和光电传感跟踪两种。理论参数跟踪是通过对预先设定好的太阳气象参数进行跟踪。此类跟踪系统优点在于无外置传感器、成本低、廉稳定性好,但是精度差、有系统累积误差、跟踪方式不灵活、受地形和天气影响较大。
光电传感跟踪是利用外置的光电传感器来计算太阳的高度和方位角来调整硅光电池方位,此种跟踪方式优点在于精确,但是有外置传感器,可靠性不高,结构比较复杂,成本比较高。此类追踪系统如果受到外部的遮挡(如树荫等),传感器所接收到的太阳光强度就会发生改变,使系统无法正确地追踪,从而使系统的接收率下降。如果是在没有太阳光的阴天,系统也不能够做出正确的追踪[2]。本文提出了一种通过实时地遍历扫描来确定最大电流点方位的方法。该方法无需外置光敏传感器,而且可以实时追踪最大电流点,双轴自动追踪,克服了传统追踪方式的缺陷。
1 遍历式追踪系统的组成
如图1所示,追踪系统由MCU控制单元、电流变送器和双轴跟踪单元组成,无单独外置的传感器,硅光电池板在本系统中充当了光强传感器、在发电的同时又检测了光线的强度。电流变送器用来检测硅光电池板的输出电流并将电流的大小信号传送给MCU控制单元。MCU控制单元用来接收电流变送器的信号并控制双轴跟踪单元来确定电池板的最大电流方位。
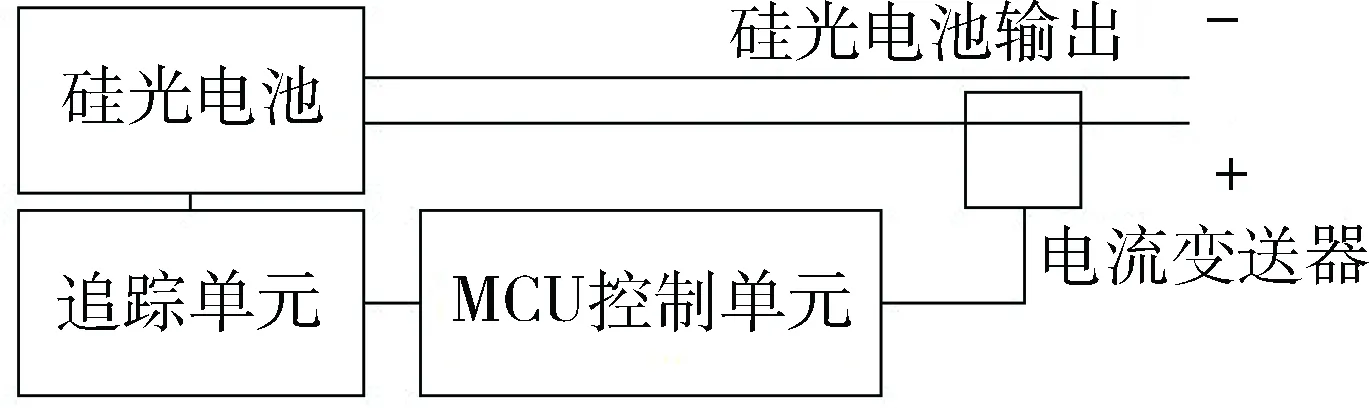
图1 遍历式追踪系统组成框图
2 遍历式踪系统的原理及特点
受地球自转的影响,光线在地球上的照射角平均大约以每小时15°变化,因此追踪系统要实时监测电流值并及时更新扫描方位,确定新的最大电流点。该系统设定每当电流值比重新定位后的值下降10%时开启遍历扫描,来跟踪光线的最大电流点方位。追踪系统通电后系统初始化,硅光电池板在方位角上进行0°~180°X轴的扫描,MCU单元通过电流变送器感知电流最大的方位并做标记a存储在系统内存中[3]。再以a点为基点在高度角方向上进行0°~180°的Y轴扫描,MCU单元通过电流变送器感知高度角的电流最大处并在系统中做标记为b存储在系统内存中。硅光电池版的最大电流输出方位就是以(a,b)为坐标的点,追踪系统存储此坐标到系统中并将硅光电池板移动到此坐标上,单次遍历扫描完成(如图2所示)。
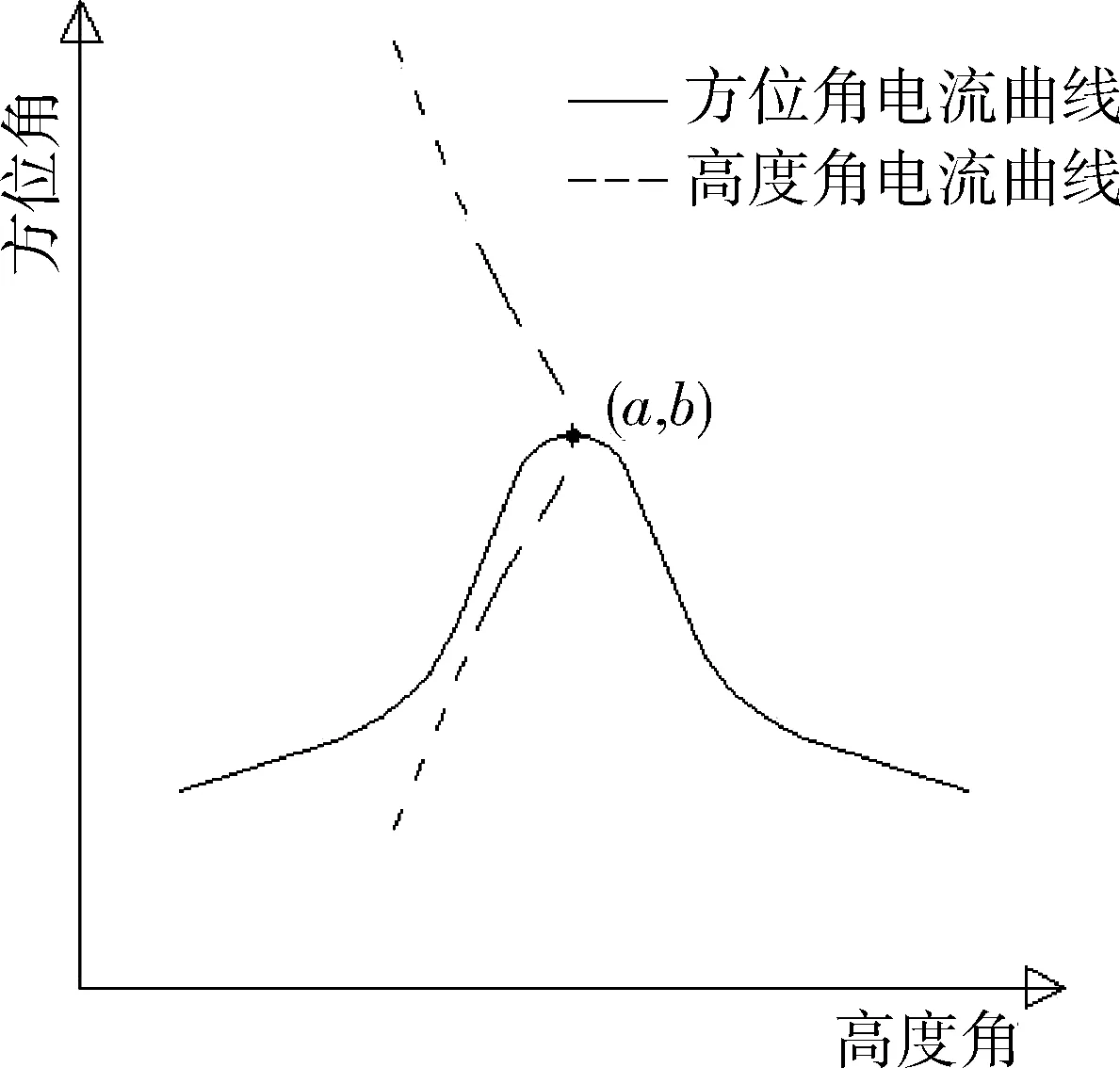
图2 遍历式追踪系统原理图
遍历式最大电流点追踪系统摒弃了传统的光电传感器,仅仅通过MCU的AD功能检测硅光电池输出线的压降的方式计算输出电流值。在追踪算法方面以硅光电池的最优电流输出为判断依据而不是使用传统的四象限光敏电阻位置判断法,如此可以有效地避免外部遮挡而导致的系统对太阳方位的误判,从而更加有效地提高发电效率。在追踪系统上使用了间歇式的追踪系统,硅光电池输出电流不降低到一定阈值不启动电机,从而有效地减少系统损耗,增加了系统的使用寿命[4]。
3 驱动单元结构设计
此装置由水平轴和竖直轴组成,各有一套高精度伺服电机和变速箱单独驱动,如图3所示,水平轴可以实现对太阳方位角的追踪,竖直轴可以实现对太阳高度角的追踪[5]。根据MCU控制单元监测的电流水平来对追踪驱动单元发出控制命令,追踪驱动单元根据命令精确地驱动电机到预定位置,为了增加系统的稳定性,系统的姿态调整算法使用了PID控制,通过调整驱动输出的电流和电压相位来增加系统稳定性,有效避免系统的震荡。
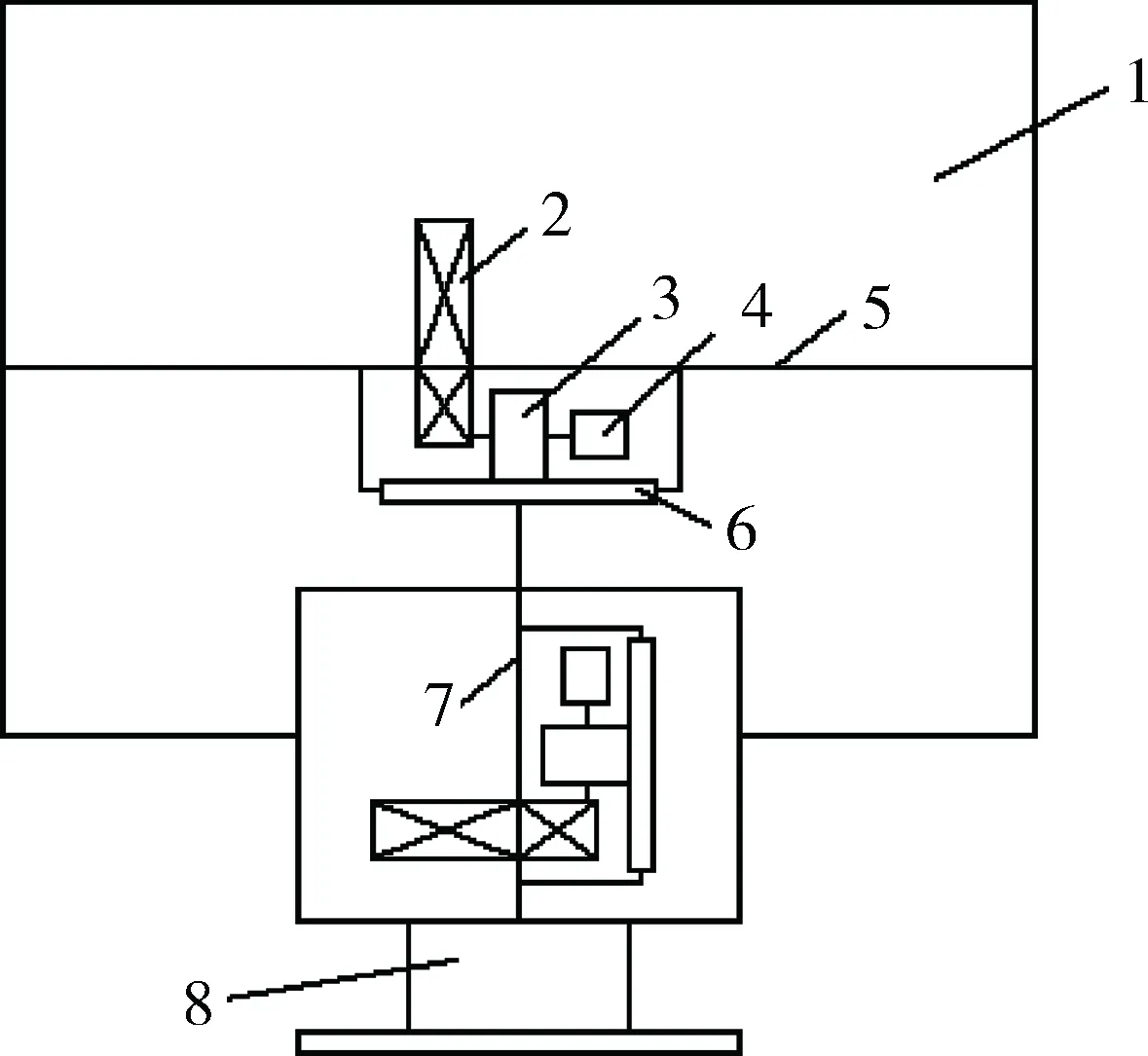
1-硅光电池板框;2-驱动齿轮;3-变速齿轮;4-高精度伺服电机;5-水平轴;6-驱动总成支架;7-竖直轴;8-整体支架图3 驱动单元的组成
4 遍历式追系统硬件设计
4.1 MCU控制单元硬件设计
该遍历扫描追踪系统硬件采用模块化设计,由MCU单元和追踪驱动单元组成,MCU单元电流变送器接口和X-Y轴驱动接口如图4所示。
步进电机都连接至MCU控制单元,MCU先通过控制X-Y驱动板进行X轴和Y轴的遍历扫描配合检测电流变送器信号的大小来确定最大电流点的方位坐标,并通过步进电机将硅光电池板调整至该坐标。
4.2 追踪单元驱动设计
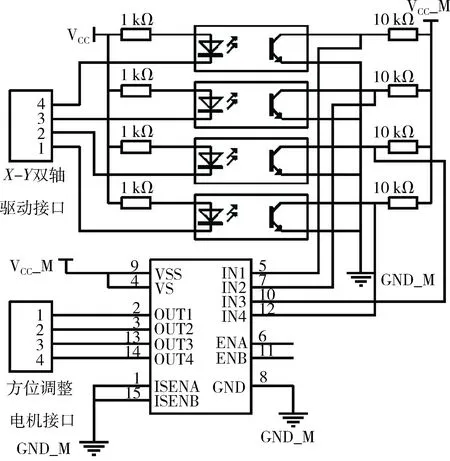
图5 追踪单元硬件设计
X-Y追踪驱动板直接接入MCU控制单元,接受控制命令并驱动电机调整硅光电池方位,其中驱动板的输入输出信号采用了光耦隔离设计,使MCU控制信号和驱动板的输出相互隔离,使系统整体工作稳定,抗干扰能力强。追踪单元硬件设计如图5所示。
5 遍历式踪系统软件设计
系统软件主要包括主程序、电流、方位采集子程序、参数查询程序和增加电机闭环控制稳定性的PID控制子程序等,主程序流程如图6所示。
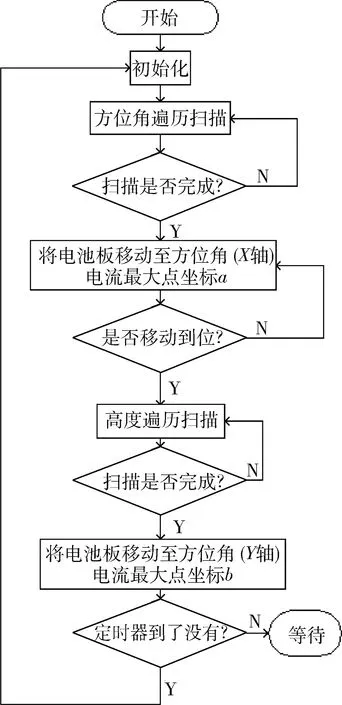
图6 遍历式踪系统软件主程序设计
6 系统参数性能对比试验
本追踪系统完成后,通过市场采购到了一款迈贝特(厦门)新能源有限公司生产的MRac光电跟踪的高精度双轴追踪系统来做性能对比试验。
两套系统使用相同的天合光能TSM-270PD05光伏组件,输出功率检测系统使用爱德克斯的IT7802电子负载(含两个IT8732B模块),在同样的地点,光照时长从上午的9点到下午5点钟,一共八个小时。两者各项参数的对比如图7所示。

表1 系统参数对比
该系统在同样的光照条件下和市场现有的高精度双轴跟踪系统对比效果基本相当。而且该系统在定位精度相当的情况下仅使用了一个电流变送器,没有外置传感器,使得系统结构简单化,维护简单,系统可靠性也会显著地增加。
7 结论
硅光电池搭配精确的光线追踪系统可以大大提高发电效率,本文利用硅光电池本身为传感器,通过硅光电池的遍历追踪确定硅光电池实时最大电流点方位的光线追踪系统,以MCU为控制核心,实时调整电池板的高度角和方位角,电路简单可靠,精确度高,成本低廉,维护简单,可叠加扩展性强,有着不错的应用前景。
该系统属于物理方位层面的最大电流点追踪系统,可以把电池板的方位进行最优化调整,将光照的效能发挥到比较理想的状态。将来可以在硅光电池板特性层面上运用现在日渐成熟的最大功率点(MPPT)追踪控制器来追踪硅光电池I-V曲线和负载线的交点实现最大功率点追踪,使最大电流点追踪和最大功率点追踪有机结合,实现物理方位层面和硅光电池特性层面的双优化。