基于图像识别的立定跳远自动测距系统设计
2018-10-20王震巩秀钢冯韶文杨晨王涛
王震 巩秀钢 冯韶文 杨晨 王涛
Abstract: At present, there are few types of standing long jump automatic distance measuring systems on the market, which are mainly divided into pressure sensor ranging and infrared sensor ranging.The required large number of sensors results in high prices and it is inconvenient to move the instruments during the measurement process.To solve this problem, standing long jump automatic distance measuring system based on image recognition is designed.The system uses an ARM microprocessor as the core, and externally connects multiple modules such as radio frequency identification, image acquisition and alarm prompts.The radio frequency identification module is used to detect the user's identity, and the high-definition, high-speed autofocus camera is used as an image acquisition device. Image processing is performed by an algorithm to realize achievement measurement.The test shows that the design of the standing long jump automatic distance measuring system can achieve accurate measurement of the user's standing long jump, the system is stable and reliable, and the output is within the theoretical error range.The automatic ranging system has the characteristics of low cost and low power consumption, and can be applied to various applications.
引言
立定跳遠是学生在校期间体育达标的必测项目[1]。在立定跳远测试中,许多学校已经采用了自动测距系统。目前,立定跳远自动测距常规采用的方法主要有2种。一种是利用压力传感器进行测距,当测试者落地后,触发跳毯下方压力传感器,产生电平信号,计算出成绩。另一种是利用红外对射传感器的持续对射实现测距[2],跳毯上方布置红外线光路,正常红外脉冲照射时,红外接收端输出低电平信号,当测试者落地后发生遮挡,遮挡范围内的红外接收端输出高电平,从而计算出成绩。通过分析可知,前者由于需要将压力传感器以面的形式布设到跳毯下方,所需传感器数量较多,导致设备笨重、移动不便。而采用后者虽然设备重量轻、移动便捷,但由于红外对射传感器需排布在跳毯上方,在使用过程中易发生触碰,导致对射传感器的角度发生改变,对成绩的测量精度将会带来一定的误差。
在分析了如上2种方法的特点之后,本文研发提出了一种的基于图像识别[3-4]的立定跳远测距系统。在硬件设计上采用ARM微处理器作为控制主机和网络服务器,并增加了射频识别、报警提示、图像采集等功能模块。其中,ARM微处理器具有高速运算的能力,可以对采集到的图像进行高速处理[5-6],并对处理后的图像提送至算法分析[7-8],从而计算出测距成绩。本系统在实现测距功能的同时,增加了用户刷卡登录、数据导出及远程传输[9-10]、报警提示[11]等功能,保证了测试流程的便捷性和测试结果的公平性。
1系统整体设计方案
立定跳远自动测距系统方案设计如图1所示。系统主要由人机交互模块、检测模块、核心控制模块和上位机构成。其中,人机交互模块包括图像采集功能、射频识别功能和报警提示功能。检测模块由红外对射模块、振动检测模块组成,通过采集用户的测试信号,用以触发图像采集功能。核心控制模块主要采用ARM微处理器作为控制器,通过查询射频识别输入的信息,判断是否与数据库服务器中的数据相匹配,若不匹配,则进行报警提示,若匹配,则控制图像采集模块开启工作,再对采集的图像进行加工、计算,最终将结果远程传输至上位机加以存储,并通过Web端提供效果显示。
2系统硬件设计
2.1系统结构图
立定跳远自动测距系统结构布局如图2所示。 图2中,部分1是系统的图像采集模块,主要用于测试过程中的图像采集;部分2是系统的射频识别模块,重点调配用户的刷卡登录功能;部分3是系统的核心控制模块,实现对系统各个模块的统筹控制以及图像处理;部分4是振动检测模块,将随时监测用户是否跳跃落地,以触发图像采集进程;部分5是红外对射模块,具体功能是防止用户测试过程中超过起跳线造成违规,发挥报警提示作用。下面,针对本系统中的各主体设计模块则将展开如下研究论述。
2.2核心控制模块
本设计采用ARM Cortex-A53内核的64位处理器BCM2837作为系统控制器,处理器基于高性能的ARM Cortex-A53的64位精简指令集计算机内核,工作频率高达1.2 GHz、拥有4核ARM处理器、1 GB RAM存储器,具有很高的处理速度和运算能力。该控制器还具有HDMI接口、4个USB 2.0端口,支持通过输入/输出设备进行可视化操作;搭载蓝牙和WiFi模块,控制器通过无线传输与服务器建立连接,优化了控制器和上位机之间数据交互,实现信息传递;配有40针扩展GPIO引脚,多个扩展GPIO口可以连接多个传感器从而定制多种功能,同时经过GPIO传输数据,最终呈现高效和稳定的效果。
2.3人机交互模块
本系统人机交互模块主要包括图像采集、射频识别、报警提示3部分。考虑到系统的通信速率、兼容性和扩展性等要求,同时又考证了市场上现有射频芯片的功能、成本和应用范围,本系统射频识别模块采用了125 KHz的射频识别模块。图像采集模块选用KS8A17AF硬件800万像素高清高速自动对焦摄像头模组,该摄像头模组尺寸为38 mm*38 mm(±1 cm),采用USB3.0标配接口,供电方式为USB供电,分辨率为JPG/YUY 2帧速,所采用摄像头反应迅速,可通过指令进行图像的抓取。
2.4检测模块
本系统检测模块由红外对射模块和振动检测模块组成。具体来说,红外对射模块由发射端和接收端2部分组成,其主要作用是检测用户起跳时是否越界。由于感应方式是对射型,故将其分别放置于跳毯起跳线两端。基于本次设计的实际情况,并酌情考量了市场上传感器成本,本系统最终采用感应距离1 m的HD-DS100CM红外对射模块。
为捕捉用户起跳后落地瞬间,本系统设计了一种振动检测模块。该模块在没有接收到振动信号时,振动开关呈闭合导通状态,输出端保持低电平,绿色指示灯常亮;当振动传感器捕捉到用户落地产生振动时,开关瞬间断开,输出端转为高电平,绿色指示灯不亮;输出端与核心控制模块直接相连,通过核心控制模块检测高低电平的变化,作为触发采集模块工作的开关。
振动检测模块原理设计可如图3所示。
3系统软件设计
本测距系统的软件设计主要包括基于图像处理的测距算法、测量结果的远程传输及Web端显示2部分。这里,将给出每一部分的设计阐释与分析。
3.1基于图像处理的测距算法
3.1.1降噪处理
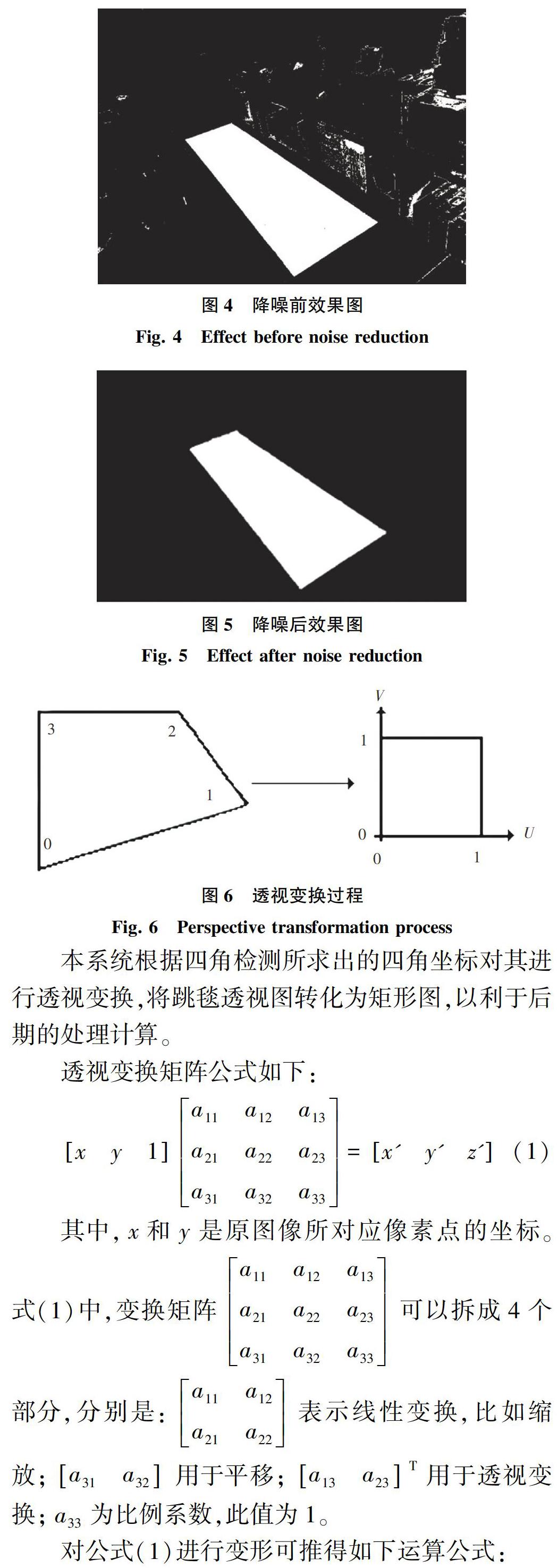
由于实际测试中的颜色限制,在HSV空间中相对于在RGB空间中将更易于表示颜色范围,因而首先需要将摄像头采集的图像通过调节阈值,将RGB色彩模式中的数据转换为HSV颜色模型中的数值,即在不影响后续计算过程的前提下将彩色图像调制为黑白图像。利用图像去噪中主要应用的2种形态学滤波方法,也就是:图像的开运算和闭运算。通过对图像的多次膨胀和腐蚀处理,实现图像的精准去噪。采集的跳毯图像降噪前后对比即如图4、图5所示。
3.1.2四角检测
对本系统拟将识别的跳毯区域进行四角检测,依次遍历降噪后图像中的全部白色像素点,分别记录标出最上、最右、最下、最左4个白色像素点的坐标。由此求出的4个坐标组成的连通区域,就是跳毯在降噪之后图像中的效果图,即为测试过程中的极限区域,用户的测试成绩应当在此范围之内。
3.1.3透视变换
透视变换是指利用透视中心、像点、目标点三点共线的条件,按透视旋转定律使承影面(透视面)绕迹线(透视轴)旋转某一角度,破坏原有的投影光线束,仍能保持承影面上投影几何图形不变的变换,透视变换过程如图6所示。
本系统根据四角检测所求出的四角坐标对其进行透视变换,将跳毯透视图转化为矩形图,以利于后期的处理计算。
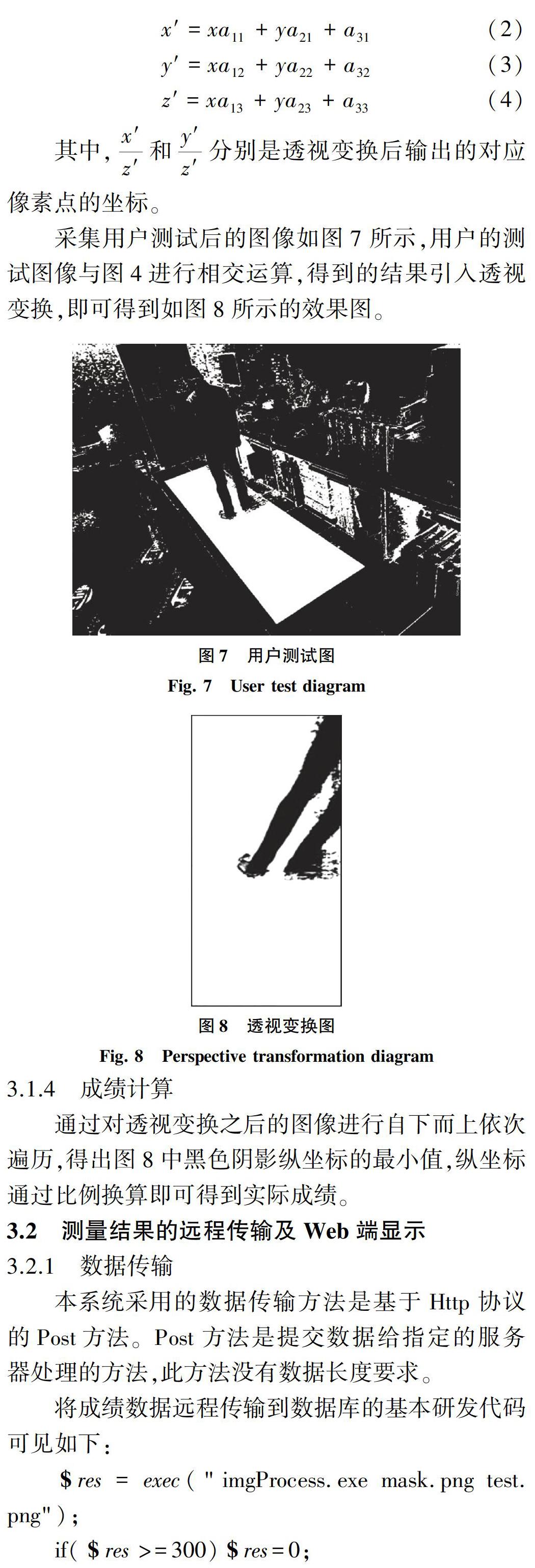
采集用户测试后的图像如图7所示,用户的测试图像与图4进行相交运算,得到的结果引入透视变换,即可得到如图8所示的效果图。
3.1.4成绩计算
通过对透视变换之后的图像进行自下而上依次遍历,得出图8中黑色阴影纵坐标的最小值,纵坐标通过比例换算即可得到实际成绩。
3.2测量结果的远程传输及Web端显示
3.2.1数据传输
本系统采用的数据传输方法是基于Http协议的Post方法。Post方法是提交数据给指定的服务器处理的方法,此方法没有数据长度要求。
3.2.2Web端显示
本系统借助可视化手段,将数据清晰有效地展示出来,用户通过浏览器访问服务器数据。系统前端页面主要是利用ECharts组件生成,此组件自带了多种展示数据的API,在提高开发速度的同时,也降低了开发成本。
在ECharts提供的JavaScript代码中插入变量,经服务器处理之后传回到浏览器,浏览器解析静态网页之后即可将数据发布出来。测试数据在网页端的显示效果如图9所示。
圖9中,条形图是学生的成绩展示。其中,红色是女生测试成绩,蓝色是男生测试成绩。本页面每10 s定时刷新一次,实现成绩页面的动态展示。
4结束语
体育仪器的智能化方兴未艾,是一个极具开发前景的重要研发方向。本文设计了基于图像识别方法的立定跳远测距系统,利用对图像的分析,快速计算出跳远成绩。通过射频识别模块对用户身份给出验证判定,测量结果通过无线网络发送到远程的上位机,进行后期的分析和图形化的显示及存储。该测距系统经过测试,在测量方法、精度、经济性等各方面均达到了设计要求,可以应用到校园或者相关机构的智能化体能测试场景中。(下转第70页)参考文献
[1] 赵安庆, 宁辽贞,李耀,等. 立定跳远自动测距仪系统设计[J]. 微计算机信息, 2010, 26(14):50-51,115.
[2] 曹厚文, 唐海玉, 李芃松,等. 联用校园卡的立定跳远测试仪的设计[J]. 当代体育科技, 2014(36):226-228.
[3] OUYANG Ping, ZHANG Yufang. Application of morphology open and close operation in resident edge detection[J]. Bulletin of Surveying and Mapping, 2009(1):40-41,59.
[4] 雷建锋, 汪伟. 基于OpenCV的图像阈值分割研究与实现[J]. 现代电子技术, 2013,36(24):73-76.
[5] 谢勤岚. 图像降噪的自适应高斯平滑滤波器[J]. 计算机工程与应用, 2009, 45(16):182-184.
[6] HUNT W A, JOHNSON G S. The area perspective transform: A homogeneous transform for efficient in-volume queries[J]. ACM Transactions on Graphics, 2011, 30(2):8.
[7] 陈白帆, 蔡自兴. 基于尺度空间理论的Harris角点检测[J]. 中南大学学报(自然科学版), 2005, 36(5):751-754.
[8] 张洁,方厚加. 基于图像处理技术的车牌识别研究[J]. 智能计算机与应用,2016,6(1):75-79.
[9] 陈艳, 张冬姣. 数据库设计[J]. 福建电脑, 2012, 28(2):109-110.
[10]查志琴,李慧. HTTP协议的发展对Web服务器性能的影响[J]. 常州工学院学报,2003,16(2):49-52.
[11]SALIKIN A L, TIUN S. A flexible malay speech synthesis using espeak design[J]. Asia-Pacific Journal of Information Technology and Multimedia, 2015,4(2):11-19.
