基于计算机视觉的商场人流量检测系统的设计
2018-10-20薛振北李泽滔
薛振北,李泽滔
(贵州大学电气工程学院,贵州 贵阳 550025)
0 引言
行人检测问题是计算机视觉领域中研究的热点问题,它通过计算机模拟人类的视觉系统来处理图像和视频,从而在视频监控方面能够省去人为统计的时间[1-4]。由于一般的摄像头只可以单面照射,不能对行人进行全面拍照,而且一般情况下判断行人进出商场的行为需要人为去观察,本文通过双摄像头对行人检测,实验的工具为VS2010+OpenCV,系统能够实现在无人监视的情况下对行人检测及统计计数,搭建了双摄像头联合检测行人的实验研究平台,取得了良好的效果。
1 系统总体框架
系统是由两个摄像头对进出商场的行人进行人脸抓拍,将得到的数据传到PC机,由PC机进行处理并得到商场的人流量,图1为实物模拟图。PC机的处理流程包括调用摄像头拍摄图像、滤波处理、运动物体检测、人脸检测及人数统计等几个部分。本文的总体框图如图2所示。
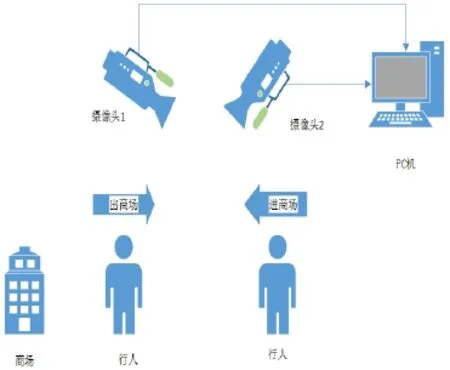
图1 实物模拟图Fig.1 Physical simulation diagram
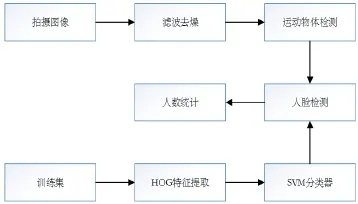
图2 系统总体框图Fig.2 System block diagram
2 系统模型的设计
2.1 图像预处理
由于光照、阴影等不确定因素的影响,采用摄像头拍摄的视频序列总会存在噪声,而对图像的预处理可以对图像的噪声进行很好的抑制,图像预处理的流程为读取摄像头拍摄到的每一帧图像,然后将图像灰度化,最后得到的灰度图像进行滤波处理。图像预处理是对图像的边缘信息进行过滤,使图像更易于检测,也就是图像的滤波。
图像滤波的主要目的是将光照等与检测不相关的信息去除,这一步在图像预处理中占有最大比重,滤波的效果也是对整个系统的一种重要评价。经常使用的滤波方法有很多,本文使用的方法是高斯滤波的方法,在OpenCV中可以简单实现,使用的GaussianBlur函数如下:C++: void GaussianBlur(InputArray src, OutputArray dst,Size ksize, double sigmaX, double sigmaY=0, int borderType)。图像滤波的效果图如图3所示。
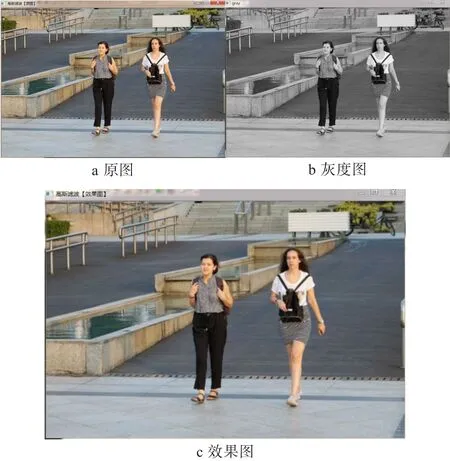
图3 滤波效果图Fig.3 Filtering effect diagram
2.2 运动物体的检测
光流法和帧差法是运动物体检测的有效且常用方法,这些方法是用来检测运动物体的,不管如何都能够很好地“看到”运动的物体。这些方法的核心都是利用视频帧与帧之间的区别来判断是否有运动物体的出现。在这些方法中,相邻帧差法具有很强的鲁棒性,适合商场的人流量检测的系统。该方法主要是利用相邻两帧序列图像对应的像素点进行作差运算,若得到的差值大于给定的阈值,则判定当前场景中有运动目标,否则就没有运动目标,运算的公式如下[1]:

式中Hk(x,y)是图像序列的像素,T是事先确定的阈值,若Dk(x,y)≥T,那么就说有运动目标的出现;若Dk(x,y)<T,那么就说没有运动目标的出现。
2.3 行人的检测
对行人检测方法的研究在计算机领域中是一项重点,也是难点[5-7]。计算机视觉是研究如何使机器代替人眼对目标进行识别的科学,在行人检测这一块是要研究怎样使用PC机通过摄像头等传感器看到物体,并判断是否为行人,最终进行统计。总体来说,目前行人检测最好的几种方法有以下三种:改进的HOG+改进的SVM、HOF+CSS+adaboost及HOG+LBP+SVM方法[8-11],这些方法都有各自的特点,常常都是配合着来使用。本文对于实际情况,考虑商场的特点,使用改进的HOG+改进的SVM方法。
2.3.1 HOG特征
HOG(Histogram of Oriented Gradient),中文名称是方向梯度直方图,这是一种挖掘图像信息的很有效的方法,这种图像的信息称之为梯度信息。通过计算这些梯度信息,将这些信息用直方图表示,就构成了HOG特征。HOG特征检测方法是法国研究人员Dalal在2005年的CVPR会议上提出来的,后经过专家学者的不断改进得到现在的改进HOG的特征[13]。通常的情况是使用改进的HOG特征与改进的SVM分类器对行人进行综合检测。
由于梯度通常都是存在于边界的地方,所以需要用很多图像作为样本提取行人的HOG特征,也就相当于对图像中局部区域进行的描述。HOG特征的主要思想是化整为零的战略,将要提取特征的一幅图像分割成很多小的区域,在这些小的区域中统计HOG特征,最后将小的特征进行组合,得到整体的HOG特征图。HOG特征的提取是在局部小的连通区域中的操作,某些区域的改变不会对整幅图像的HOG特征造成大的影响,所以该检测方法具有很强的鲁棒性,非常适合对行人目标进行检测。采用经典的图像进行试验,得到的HOG特征提取的图像如图4所示。

图4 HOG特征提取图Fig.4 HOG feature extraction diagram
HOG特征提取的过程如下:
1)由于颜色信息的作用不大,所以对图像进行灰度化处理,减少计算机处理的信息量。
2)使用校正法对图像的像素进行校正,所使用的方法是Gamma校正的方法。该方法的公式见式(3),式中gamma=1/2。

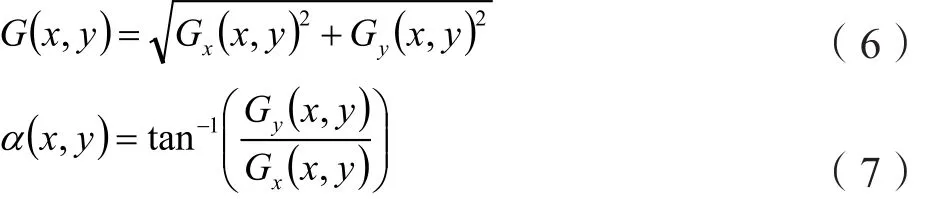
3)计算图像中每个像素的梯度,其中像素点(x,y)处的梯度计算方法如下:

梯度幅值和梯度方向分别为:
4)将整幅图像分割成许多小的方格,这些方格称为cells(胞元)。并将固定的一些cells连成一个块。
5)提取每一个块的HOG特征的信息,用9个bin统计图像的HOG特征,即将0°~180°平均分成9份,每个像素的梯度方向为a(x,y),属于哪一个bin,就将该像素的信息都放在这个bin中。
6)把小的连接成大的,也就得到图像所有的方向梯度信息。
2.3.2 SVM分类器
SVM,即支持向量机,是一种在计算机视觉领域中使用的分类的方法,是由分类超平面定义的一种分类方法[15-17]。本文使用SVM分类器主要是针对行人人脸的HOG特征进行分类,也就是在提供了充足的正样本(含有人脸的图像)及负样本(不含人脸的图像),并且这些正、负样本进行了HOG特征的提取之后,由SVM分类器进行分类识别。SVM分类器的解释的图如图5所示。将预先整理好的正、负数据集找到最优的分隔超平面,提取感兴趣的区域。所提到的支持向量也就是离这个分隔超平面最近的一些数据。
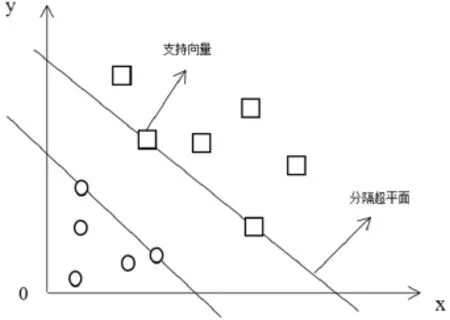
图5 SVM分类器Fig.5 SVM classifier
通过使用改进的HOG+改进的SVM方法之后,对于摄像头所拍摄的视频帧,我们可以直接调用这种方法对图像进行不断地扫描,进行模板匹配,进而判断是否有行人的出现[18]。通过实验的方法得到效果图,如图6所示。

图6 行人检测效果图Fig.6 Pedestrian detection effect diagram
3 实验结果
本文设计的思路如图1所示,对两个摄像头拍摄的图像中的行人分别进行统计计数,其中摄像头1采集和统计的行人的数目为进入商场的人数,摄像头2采集和统计的行人的数目为离开商场的数目,对这两个数据作差即为商场中的人流量[19-20]。通过实验仿真,采用某间教室作为模拟商场的场所,得到一天中各时段教室中的人数,如表1所示,对得到的数据进行分析对比,通过本文的方法得到的数据与实际的数据相差不大,能够很好地代替工作人员的职责。
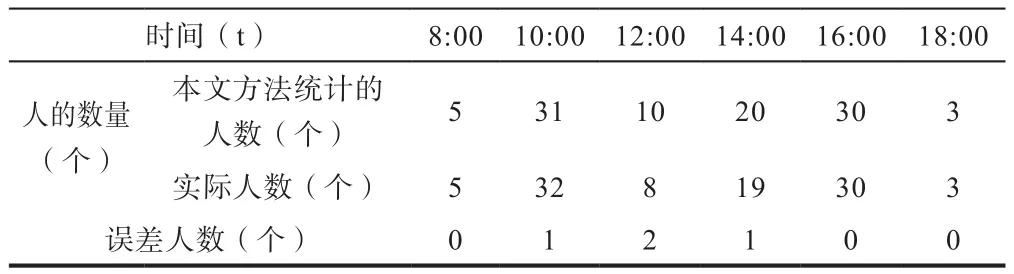
表1 人数统计Table1 Number statistics
4 结论
在商场应急突发事件的应对措施中最大程度地减少人员的伤亡,需要每时每刻都能准确掌握商场内的人员情况。为减少人员的伤亡,本文设计了对商场内人员进行检测的系统。虽然该方法还存在一些缺陷,比如对遮挡的行人的检测效果不是很理想,但是对商场内人数的统计起到了很好的作用,能够很好地减少商场负责监控的人员的工作量。
